表贴式永磁同步电机伺服系统电流环设计_王恩德

第32卷第33期中国电机工程学报V ol.32 No.33 Nov.25, 2012
82 2012年11月25日Proceedings of the CSEE ?2012 Chin.Soc.for Elec.Eng.
文章编号:0258-8013 (2012) 33-0082-07 中图分类号:TM 351 文献标志码:A 学科分类号:470 40 表贴式永磁同步电机伺服系统电流环设计
王恩德,黄声华
(强电磁工程新技术国家重点实验室(华中科技大学),湖北省武汉市 430074)
Current Regulator Design for Surface Permanent Magnet Synchronous Motor Servo Systems
WANG Ende, HUANG Shenghua
(State Key Laboratory of Advanced Electromagnetic Engineering and Technology (Huazhong University of
Science and Technology), Wuhan 430074, Hubei Province, China)
ABSTRACT: The current control loop directly affects the current of the surface permanent magnet synchronous motor (SPMSM) and the electromagnetic torque, which makes the static and dynamic performance of the motor deteriorate. The decoupling control cannot be realized with the changes of the motor’s inductance parameters due to saturation effects when the operating condition changes. This paper proposed a decoupling control to improve the dynamic performance, without the inductance value with the perspective of complex vector. As the dead zone, the motor manufacturing process and the magnetic saturation, the servo system current often contains low-order harmonics, such as 5th, 7th, 11th, 13th, which produce torque ripple and affect the motor’s performance. The current regulation with the proportional Integral and proportional resonance based on the synchronous rotating dq coordinate was used for the closed loop control of the low harmonic currents, to improve the system performance. Simulation and experimental results verify the feasibility of the schemes proposed by this paper.
KEY WORDS: surface permanent magnet synchronous motor (SPMSM); synchronous dq coordinate; complex vector; decoupling control; proportion resonance
摘要:电流环直接影响表贴式永磁同步电机(surface permanent magnet synchronous motor,SPMSM)伺服系统的电流波形和电磁转矩,使系统的动、静态性能变差。当系统运行工况变化使得电机电感饱和时,电流环中含有电感参数的解耦项就会失效。从合成矢量的角度出发,提出了一种同步dq旋转坐标系下无需电感参数的电流解耦调节器,实现了无电感参数解耦控制,改善了SPMSM系统的动态性能。另外,由于死区、电机制造工艺、磁场饱和等原因,电机电流中含有影响系统性能的5、7、11、13等低次谐波。提出了同步旋转dq坐标系下比例积分+比例谐振(proportional integral + proportional resonance,PI+PR)的电流复合调节器,对低次电流谐波进行闭环调节,从而显著减小了谐波电流,改善了系统性能。仿真分析和实验结果均验证了该方案的可行性。
关键词:表贴式永磁同步电机;同步旋转dq坐标系;合成矢量;解耦控制;比例谐振
0 引言
表贴式永磁同步电机(surface permanent magnet synchronous motor,SPMSM)的永磁体产生与转子同步旋转的正弦波磁场,通过编码器获得转子位置后就能方便地实现基于转子磁链解耦的矢量控制,达到等同于直流伺服系统的控制精度。SPMSM具有功率密度高、损耗小、电气时间常数小等优点,加之近年来数字控制芯片的快速发展,使得基于SPMSM的数字交流伺服系统广泛应用于数控机床、航空航天等领域[1,2]。
应用场合的多样化和复杂性,也对伺服系统的静、动态控制性能提出了更高的要求。基于SPMSM 的伺服控制系统是一个包含位置环、速度环和电流环的多闭环系统。其中,作为最内环的电流环决定了电流的跟踪性能,直接影响SPMSM的输出转矩,对伺服系统的控制性能起着非常重要的作用。文献[3-4]分析了永磁同步电动机控制的电流环,并设计了调节器参数,其中文献[3]引入微分环节和过调制技术,文献[4]分析了电流环3种控制方法的利弊,并提出适用于工程实践的设计方案。为了简化分析,文献[3-4]均忽略了耦合项,但这样会导致系统的动态性能变差。文献[5]从电流环带宽的角度出发,提出了带宽扩展策略,提高了伺服系统的动态性能,虽然考虑了耦合项,但没有考虑电感变化对解耦控制的影响。文献[6]提出了一种基于合成矢量的无需电感参数的解耦控制策略,取得了较好的控
DOI:10.13334/j.0258-8013.pcsee.2012.33.013
第33期 王恩德等:表贴式永磁同步电机伺服系统电流环设计 83
制效果,但合成矢量算法相对较复杂,实现困难。
死区的引入有效防止了上、下桥臂直通,但是也带来了电流畸变
[7-9]
。受永磁体及电机加工工艺上
的限制,实际上电机永磁转子的励磁磁场和定子磁势的空间分布不是理想正弦[10]。由于磁链饱和的存在[11],实际电机磁场中也会含有谐波。文献[7-11]分别针对死区、电机制造工艺和磁场饱和,从不同的角度进行分析,提出了一些比较有效的补偿策略。电流畸变的原因虽有不同,但是从畸变电流的成分看,无论是死区效应,电机制造工艺还是磁场饱和都会使电流含有大量的5、7、11、13次谐波。这样若能对这些谐波电流进行控制,减小这些谐波电流,便可显著改善SPMSM 伺服系统的性能。由内模原理可知,传统比例积分(proportional integral ,PI)控制器能对直流量进行无静差跟踪[12]。比例谐振(proportional resonance ,PR)控制器能够实现对正弦量的无静差跟踪,现已广泛应用于对电流谐波含量有严格要求的逆变并网系统中[13-15]。为了减小电机控制系统中的谐波电流,近年来,比例谐振控制器也逐步应用在发电机并网以及感应电机电流环控制中[16-18]。
本文建立了SPMSM 电流环的数学模型,从合成矢量的角度出发进一步推导,得到了SPMSM 同步旋转dq 坐标系下无电感参数的解耦控制策略,从而消除了耦合项的影响,并将影响系统性能的5、7、11、13次等主要谐波成分转换到同步旋转dq 坐标系下,采用PI+PR 控制器消除其影响。
最后搭建了仿真和实验平台,对文中所提出的电流调节器的合理性进行了验证。
1 SPMSM 伺服系统分析
同步旋转dq 坐标下的SPMSM 电压方程为
r r f d d d ()
d d d d d q q q q q q d d
i u L Ri L i t i u L Ri L i t ωωψ?
=+-??
?
?=+++??
(1) 式中:u d , u q , L d , L q , i d , i q 分别为dq 轴上的等效电压、电感、电流;d , q 轴上的等效电阻可认为相等,R d =R q =R ;ψf 为转子永磁体磁链;ωr 为电角速度。
由式(1)可知,在同步旋转dq 坐标系下,dq 轴间存在含有电感参数的耦合项,若要实现完全解耦控制,就需要知道精确的电感参数。而实际系统中,由于饱和的影响,电感会随着电流的增加而减小,这样若电感取一个定值就无法实现电流的完全解
耦,甚至会导致解耦失败,影响电机的控制性能。
2 SPMSM 伺服系统电流调节器设计
2.1 无电感参数的电流解耦控制
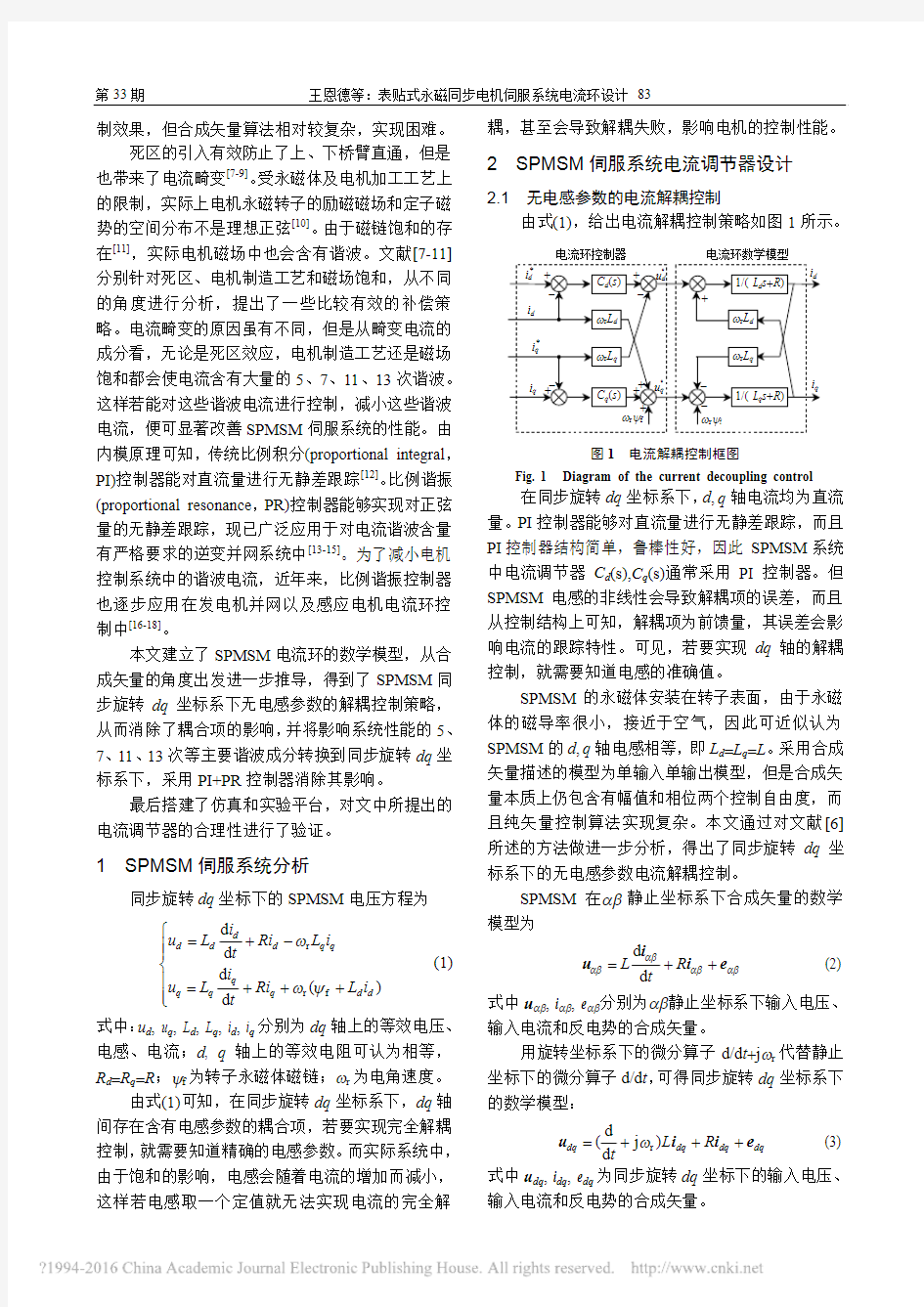
由式(1),给出电流解耦控制策略如图1所示。
电流环控制器电流环数学模型
图1 电流解耦控制框图
Fig. 1 Diagram of the current decoupling control
在同步旋转dq 坐标系下,d , q 轴电流均为直流量。PI 控制器能够对直流量进行无静差跟踪,而且PI 控制器结构简单,鲁棒性好,因此SPMSM 系统中电流调节器C d (s),C q (s)通常采用PI 控制器。但SPMSM 电感的非线性会导致解耦项的误差,而且从控制结构上可知,解耦项为前馈量,其误差会影响电流的跟踪特性。可见,若要实现dq 轴的解耦控制,就需要知道电感的准确值。
SPMSM 的永磁体安装在转子表面,由于永磁体的磁导率很小,接近于空气,因此可近似认为SPMSM 的d , q 轴电感相等,即L d =L q =L 。采用合成矢量描述的模型为单输入单输出模型,但是合成矢量本质上仍包含有幅值和相位两个控制自由度,而且纯矢量控制算法实现复杂。本文通过对文献[6]所述的方法做进一步分析,得出了同步旋转dq 坐标系下的无电感参数电流解耦控制。
SPMSM 在αβ 静止坐标系下合成矢量的数学模型为
d d L
R t
αβαβαβαβ=++i u i e (2)
式中u αβ, i αβ, e αβ分别为αβ静止坐标系下输入电压、输入电流和反电势的合成矢量。
用旋转坐标系下的微分算子d/d t +j ωr 代替静止坐标下的微分算子d/d t ,可得同步旋转dq 坐标系下的数学模型:
r d
(
j )d dq dq dq dq L R t
ω=+++u i i e (3) 式中u dq , i dq , e dq 为同步旋转dq 坐标下的输入电压、
输入电流和反电势的合成矢量。
84 中 国 电 机 工 程 学 报 第32卷
于是,可得s 域的电流表达式: r 1
()
[(/j )]
dq dq dq L s R L ω=-++i u e (4)
将R /L +j ωr 看成一个整体,可以设计基于合成矢量的电流解耦控制器:
p i p r 1
()[1(/j )]dq C s k k k s
ω=++ (5)
有,
**()()dq dq dq dq dq C s =-+u i i e (6)
令
***
***j j j j dq d q dq d q
dq
d q dq d q ?=+?=+??
=+??=+?
u u u i i i u u u i i i (7) 定义转子磁链方向为d 轴,则有e d =0,
e q =ωr ψ
f ,又由式(5)—(7)可得伺服系统的电流控制方程:
r p **
*i p r p ***i p r f ()()()()()()d d d q q q q q d d k k u k i i i i s s
k k u k i i i i s s ωωωψ
?=+---???
?=+-+-+??
(8) 于是可得图2所示的同步旋转dq 坐标系下无电感参数电流解耦控制框图。
电流环控制器
电流环数学模型
图2 无电感参数电流解耦控制框图
Fig. 2 Current decoupling control diagram without
the value of the inductance
2.2 同步旋转dq 坐标系下的PI+PR 电流调节器
为了抑制谐波电流,一种较易理解的控制策略是分别建立基于5、7、11、13倍频的同步旋转坐标下的PI 控制器,来共同调节[19]。但多坐标系下的PI 控制器算法非常复杂,而且谐波次数越高,相应的控制器对角度的准确度依赖性也越高,因为多坐标系下的PI 控制器会放大位置偏差,从而影响整个电流调节器的控制性能。
为了对SPMSM 进行基于转子磁链定向的矢量控制,通常需要建立同步旋转dq 坐标系下的电流调节器。不同于有源滤波器中将谐波直接在静止坐标系下进行跟踪,本文所采用的SPMSM 电流调节器将静止abc 坐标系下的谐波电流在同步旋转dq 坐标系下进行跟踪调节。由于cos(ωn t )= cos(-ωn t ),所以5次谐波可看作-5次,在同步旋转dq 坐标系上可看成6次谐波,同理可分析静止abc 坐标系下的7次谐波。于是静止abc 坐标系下的5、7次谐波电流可以通过同步旋转dq 坐标系下的6倍频比例谐振调节器进行无静差跟踪,同理可通过同步旋转
dq 坐标系下12倍频的比例谐振调节器对静止abc 坐标系下的11、13次谐波进行跟踪。根据文献[13-15]给出的三相静止abc 坐标系下的比例谐振控制器设计公式,以及比例谐振控制器在三相静止abc 坐标系和同步旋转dq 坐标系之间的转换关系,并暂时忽略电流调节器中的耦合项,可以建立图3所示同步旋转dq 坐标系d 轴下的PI+PR 复合调节器。
图3 d 轴PI+PR 电流复合调节器
Fig. 3 PI+PR current regulator of the d axis
同理可建立q 轴调节器,结合无电感参数电流
解耦控制,可建立图4所示的SPMSM 电流调节器。
图4 本文所提出的电流调节器框图
Fig. 4 Proposed diagram of the current regulator in this paper
2.3 调节器参数设计及离散化
由式(8)可知,同步旋转dq 坐标系下无电感参数解耦控制器的参数选取可以采用常规的PI 参数设计方法,即通过零极点对消原则和选取合适的截至频率来获取。
同步旋转dq 坐标系下的比例谐振控制器
C 6(s )=k i6s /(s 2+ω62),可通过脉冲响应不变法[20]进行
第33期 王恩德等:表贴式永磁同步电机伺服系统电流环设计 85
离散化,可得 1i66612
61cos ()12cos z k T
C z z T z ωω----=-+ (9)
式中ω6=6ωr ,可得在同步旋转dq 坐标系下消除静止abc 坐标系下的5、7次谐波分量的表达式:
6r 66i6r ()2cos(6)(1)(2) [()cos(6)(1)]y n T y n y n k e n T e n ωω=---+-- (10)
同理可得在同步旋转dq 坐标系下消除静止abc
坐标系下的11、13次谐波分量的表达式:
12r 1212i12r ()2cos(12)(1)(2) [()cos(12)(1)]
y n T y n y n k e n T e n ωω=---+-- (11)
3 仿真和实验研究
3.1 仿真分析
为了验证电流调节器的有效性和可行性,搭建了基于SPMSM 伺服系统的仿真模型,其主要技术数据如表1所示。
表1 SPMSM 伺服系统主要技术数据 Tab. 1 Parameters for SPMSM servo
参数
数值
定子电阻R /Ω 0.46 L d , L q /mH 2.37 电机极对数p n
4
转子惯量J m /(10-3 kg ?m 2) 0.3 永磁体磁链ψf /Wb
0.142
直流母线电压/V 400 开关频率/kHz 10 死区时间/μs 3
实际系统中,电机电感参数需要额外辨识,且会随着饱和程度而变化,通常忽略掉解耦项。图5为分别采用忽略解耦项的闭环控制和同步旋转dq 坐标系下无电感参数解耦闭环控制时的转速波形,
PI 控制的参数采用传统的零极点对消和截止频率来选取。考虑到开关频率为10 kHz ,选取电流环的截止频率为500 Hz ,为了便于对比观察耦合项的作用,选取较小的转速环截止频率(20 Hz),在0.2 s 时给定转速由300
r/min 突变为800
r/min ,负载为
5 N ?m 。由图5可见采用无电感参数解耦控制能改善系统动态性能。
传统电流闭环虽然无法对谐波电流实现无静差跟踪,但在对基频电流跟踪的同时也会在一定程度上减小谐波电流。为了更好地分析谐波电流的含
量,首先进行电流的开环仿真。模型中负载为 5 N ?m 。由上文分析可知,死区、电机制造工艺和电
感饱和都会引起电流的畸变,但为了简化仿真模型,只在模型中加入3 μs 的死区来产生谐波电流,并通过电流谐波分析来验证上文关于谐波的分析结果。由于SPMSM 转子永磁体的存在,位置信息
(感应电势的相角)会影响电流特性,为了消除位置误差引起的电流畸变,仿真模型中感应电势的相角仍采用实测位置角度,但即便如此,电流开环运行时,转速有一定的波动,而且由于死区的存在,电流开环运行波形仍然含有5、7、11、13次等低次谐波,如图6所示。
1100500300100
t /s
ω/(r /m i n )
700900
图5 传统电流闭环与无电感参数解耦闭环的转速 Fig. 5 Speed waveforms with the conventional and decoupling control without the introduction value
t /s
(a) 电流波形
i a , i b , i c /A
8-4-840
谐波次数 (b) 谐波分析
谐波含量/%
201612 8 4 0
图6 电流开环时的电流波形及谐波分析 Fig. 6 Current waveform and harmonic analysis with
the openloop control
为了便于比较用传统PI 控制器的电流调节器和PI+PR 的复合电流调节器的电流谐波差异,建立了电流闭环控制的仿真模型。设定电流环的截止频
率为500 Hz ,转速环的截止频率为100 Hz ,转速为
300 r/min ,得到电流闭环控制时的电流波形,如
图7所示。
86 中 国 电 机 工 程 学 报 第32卷
t /s
(a) 电流波形
i a , i b , i c /A
--
谐波次数 (b) 谐波分析
谐波含量/%
图7 PI 电流闭环时的电流波形及谐波分析 Fig. 7 Current waveform and harmonic analysis with
the proportion integral regualtor
对比图6、7可知,与电流开环时相比,采用常规PI 解耦控制的电流闭环波形的正弦度明显要好得多,谐波分析也验证了这一点。但由于PI 控制器自身的原因,采用PI 解耦控制虽然在很大程度上抑制了5、7、11、13次谐波度,但仍会残留一部分谐波分量,使得最后的电流波形仍有一定畸变。
图8为采用PI+PR 的电流复合调节器的电流波形及其谐波分析。仿真时设定SPMSM 的转子角速度为300
r/min 。对比图7、8可知,采用PI+PR 的电流复合调节器的电流闭环可以进一步消减5、7、
11、13次谐波,使得对电磁转矩影响较大的5、7、11、13低次谐波基本为0。
图9为采用图4所示的电流调节器(包含无电感参数解耦和带PI+PR 复合电流调节器),转速给定为
300 r/min ,0.5 s 时突加负载(由2 N ?m 跳变到5 N ?m) 情况下的电机转速和三相电流波形。由以上仿真结
t /s
(a) 电流波形
i a , i b , i c /A
8 -4
-8
4
谐波次数 (b) 谐波分析
谐波含量/%
10 8 6 4 2 0
图8 采用 PI+PR 复合调节器的电流闭环波形及谐波分析
Fig. 8 Current waveform and harmonic analysis with the current regulator contained PI+PR
0.40
0.450.600.50 0.55 t /s
(a) 转速波形
ω/(r /m i n )
500400300200100
t /s
(b) 三相静止电流
i a , i b , i c /A
8-4-84
图9 突加负载的仿真波形
Fig. 9 Simulation waveforms with the jumped load
果可知,本文所提出的电流调节器能取得很好的控制效果,满足SPMSM 伺服系统电流闭环的动、静态要求。 3.2 实验结果
搭建如图10所示的实验平台。该SPMSM 伺服系统的控制器芯片采用TI 公司的TMS320F2810型DSP ,其运算频率可达150 MHz ,芯片自带有12位精度的AD 采样。利用ZCK-Ⅲ磁滞测功机作为负载。采用泰克A622电流钳测量电流。 (a) SPMSM 驱动器
(b) 表贴式永磁同步电机
图10 实验平台
Fig. 10 Experimental platform
第33期 王恩德等:表贴式永磁同步电机伺服系统电流环设计 87
图11、12分别为采用传统PI 控制器和本文所提出的电流调节器,电机运行在300 r/min ,负载为
1.3 N ?m 时的电流波形及其谐波分析。可见,采用本文所提出的电流调节器能够进一步消减5、7、11、
13次谐波含量,从而改善SPMSM 系统谐波电磁转矩的影响,改进系统的动、静态性能。
t (25 ms/格) (a) 实测电流波形
i a (2 A /格)
谐波次数
(b) 谐波分析
谐波含量/%
图11 PI 调节器的实测电流波形及谐波分析
Fig. 11 Current waveform and harmonic analysis with
the conventional proportion integral regulator
t (25 ms/格)
(a) 实测电流波形
i a (2 A /格)
谐波次数
(b) 谐波分析
谐波含量/%
图12 本文所提调节器的实测电流波形及谐波分析
Fig. 12 Current waveform and harmonic analysis with
the proposed regulator in this paper
图13为采用图4所示的电流调节器,电机转速为300 r/min ,
突加负载(由0.5 N ?m 增加到1.3 N ?m)时的电流波形。本系统采用磁滞测功机,由于系统
本身的加载速度低于SPMSM 系统的动态调节性
能,无法精确模拟实际系统中突加负载的工况,但从快速平稳的电流跟踪特性来看,本文所提出的电
t (100 ms/格)
i a (2 A /格)
图13 突加负载的实验波形
Fig. 13 Experiment waveform with the jumped load
流调节器能够实现很好的跟踪性能。
4 结论
针对基于SPMSM 伺服系统由于磁场饱和电机
电感参数变化引起电流解耦失败,以及死区、电机
制造工艺和磁场饱和使电机电流发生畸变的问题,
建立了SPMSM 电流环的数学模型,提出了基于同步旋转dq 坐标系的PI+PR 电流复合调节器。与传统控制方式进行了比较,仿真和实验结果表明: 1)采用所提出的无电感参数解耦控制能够实现电流环的完全解耦,改善SPMSM 伺服系统的动态性能; 2)相对于传统电流环,采用基于同步旋转dq 坐标系下的PI+PR 电流复合调节器,能够显著减小电机的5、7、11、13次谐波电流;
3)所提的电流调节器同样适用于异步电机以及一些新型电机的电流环控制。
参考文献
[1] 王宏,于泳,徐殿国.永磁同步电动机位置伺服系统
[J].中国电机工程学报,2004,24(7):151-155. Wang Hong ,Yu Yong ,Xu Dianguo .The position servo system of PMSM[J].Proceedings of the CSEE ,2004,24(7):151-155(in Chinese). [2] 张红娟,权龙,李斌.永磁同步电动机直躯泵控差动缸
位置伺服系统性能研究[J].中国电机工程学报,2010,
30(24):107-112. Zhang Hongjuan ,Quan Long ,Li Bin .Performance of dirrerential cylinder position servo system controlled by
permanent magnet synchronous motor driven pump [J].Proceedings of the CSEE ,2010,30(24):107-112(in
Chinese).
[3] 陈荣,邓智泉,严仰光.永磁同步伺服系统电流环的设
计[J].南京航空航天大学学报,2004,36(2):220-225.
Chen Rong ,Deng Zhiquan ,Yan Yangguang .Design of
current control loop for permanent magnet synchronous servo system[J].Journal of Nanjing University of
Aeronautics & Astronautics ,2004,36(2):220-225(in
Chinese).
[4] 万山明,吴芳,黄声华.永磁同步电机的数字化电流控制环分析[J].华中科技大学学报:自然科学版,2007,
88 中国电机工程学报第32卷
5(5):48-51.
Wan Shanming,Wu Fang,Huang Shenghua.Analysis of
digital current control loop for a PMSM[J].Journal of
Huazhong University of Science & Technology:Natural
Science Edition,2007,35(5):48-51(in Chinese).
[5] 王宏佳,杨明,刘里,等.交流伺服系统电流环带宽扩
展研究[J].中国电机工程学报,2010,30(12):56-62.
Wang Hongjia,Yang Ming,Liu Li,et al.Current loop
bandwidth expansion for permanent magnet AC servo
system[J].Proceedings of the CSEE,2010,30(22):
56-62(in Chinese).
[6] Briz F,Degner M W,Lorenz R D.Analysis and design
of current regulators using complex vectors[J].IEEE
Transactions on Industrial Applications,2000,36(3):
817-825.
[7] Oliverra A C,Jacobina C B,Lima A M.Improved
dead-time compensation for sinusoidal PWM inverters
operating at high switching frequencies[J].IEEE
Transactions on Industrial Electronics,2007,54(4):
2295-2304.
[8] 王高林,于泳,杨荣峰,等.感应电机空间矢量PWM
控制器死区效应补偿[J].中国电机工程学报,2008,
28(15):79-83.
Wang Gaolin,Yu Yong,Yang Rongfeng,et al. Dead-time
compensation of space vector PWM inverter for induction
motor[J].Proceedings of the CSEE,2008,28(15):
79-83(in Chinese).
[9] Hwang S H,Kim J M.Dead time compensation method
for voltage-fed PWM inverter[J].IEEE Transactions on
Energy Conversion,2010,25(1):1-10.
[10] 唐任远.现代永磁电机理论与设计[M].第1版.北京:
机械工业出版社,2010:234-272.
Tang Renyuan.Modern permanent magnet machines-Theory and design[M].1st edition.Beijing:
China Machine Press,2010:234-272(in Chinese).[11] 李景灿,廖勇.考虑饱和及转子磁场谐波的永磁同步电
机模型[J].中国电机工程学报,2011,31(3):60-66.
Li Jingcan,Liao Yong. Model of permanent magnet
synchronous motor considering saturation and rotor flux
harmonics[J].Proceedings of the CSEE,2011,31(3):
60-66(in Chinese).
[12] Harnefors L,Nee H P.Model-based current control of AC
machines using the internal model control method [J].IEEE Transactions on Industry Applications,1998,
34(1):133-141.
[13] Zmood D N,Holmes D G,Bode G.Frequency-domain
analysis of three-phase linear current regulators[J].IEEE
Transactions on Industry Applications,2001,37(2):
601-610.
[14] Zmood D N,Holmes D G.Stationary frame current
regulation of PWM inverters with zero steady-state
error[J].IEEE Transactions on Power Electronics,2003,
18(3):814-822.
[15] Yuan Xiaoming,Merk W,Stemmler H,et al.Stationary-
frame generalized integrators for current control of active
power filters with zero steady-state error for current
harmonics of concern under unbalanced and distorted
operating conditions[J].IEEE Transactions on Industry
Applications,2002,38(2): 523-532.
[16] 胡家兵,贺益康,王宏胜,等.不平衡电网电压下双馈
感应发电机转子侧变换器的比例–谐振电流控制策略
[J].中国电机工程学报,2010,30(6):48-56.
Hu Jiabing,He Yikang,Wang Hongsheng,et
al.Proportional-resonant current control scheme for
rotor-side converter of doubly-fed induction generators
under unbalanced network voltage conditions [J].Proceedings of the CSEE,2010,30(6):48-56(in
Chinese).
[17] 肖磊,黄守道,黄科元,等.直躯型永磁同步风力发电
机机侧变流器谐波抑制[J].中国电机工程学报,2011,
31(6):31-37.
Xiao Lei,Huang Shoudao,Huang Keyuan,et
al.Harmonic suppression for the motor-side converter of
the directly-driven wind turbine with PM synchronous
generator[J].Proceedings of the CSEE,2011,31(6):
31-37(in Chinese).
[18] Holmes D G,McGrath B P,Parker S G.A comparative
evaluation of high performance current regulation strategies for vector controlled induction motor drives
[C]//International Symposium on Industrial Electronics
(ISIE 2010).Piscataway,United States:IEEE,2010:
3707-3714.
[19] 张树全,戴珂,谢斌,等.多同步旋转坐标系下指定次
谐波电流控制[J].中国电机工程学报,2010,30(3):
55-62.
Zhang Shuquan,Dai Ke,Xie Bin,et al.Selective
harmonics current control based on multiple synchronous
rotating coordinates[J].Proceedings of the CSEE,2010,
30(3):55-62(in Chinese).
[20] 席爱民.计算机控制系统[M].北京:高等教育出版社,
2004:40-41.
Xi
Aimin.Computer control system[M].Beijing:Higher Education Press,2004:40-41(in Chinese).
收稿日期:2012-07-15。
作者简介:
王恩德(1987),男,博士研究生,研究
方向为电力电子与电力传动,wangen-
de3321@https://www.sodocs.net/doc/079421831.html,;
黄声华(1951),男,教授,博士生导师,
研究方向为电力电子、电力传动及新型特
种电机,huangsh@https://www.sodocs.net/doc/079421831.html,。
王恩德
(责任编辑李婧妍)
Extended Summary
正文参见pp.82-88
S12
Current Regulator Design for Surface Permanent Magnet
Synchronous Motor Servo Systems
WANG Ende, HUANG Shenghua
(Huazhong University of Science and Technology)
KEY WORDS: surface permanent magnet synchronous motor (SPMSM); synchronous dq coordinate; complex vector; decoupling control; proportion resonance
The AC servo system based on the surface permanent synchronous motor (SPMSM) is widely used in numerical control machine tools, aerospace and some other fields, with the rapid development of the motor digital control chip, and the advantages of thrust, low loss, and small electrical time constant for SPMSM. The servo system is usually a multi-loop system, which includes a position loop, a speed loop and a current loop. The tracking performance of the current loop, which is the most inner one, affects the output torque of SPMSM, thus affecting the dynamic and static performance of the servo system.
In order to improve the static and dynamic performance of the servo system, this paper proposes a novel current regulator, containing a decoupling regulator without the value of the inductance parameter on the synchronous dq rotating coordinate to eliminate influence of the saturation of the motor inductor, and a compound proportional integral +proportional resonance (PI+PR) current regulator to improve the current waveform so as to improve the system performance with the 5th , 7th , 11th , 13th harmonic currents, caused by the dead zone, the motor manufacturing process, and the saturation of the magnetic field.
r r f d d d ()
d d d d d q q q q q q d d
i u L Ri L i t i u L Ri L i t ωωψ?
=+-???
?=+++?? (1) Equ.(1) is the decoupling control model of the current
loop without the exact value of the inductance.
Current loop controller
Current loop mathematical model Fig.1 Diagram of the proposed current regulator The novel current regulator proposed in this paper is shown in Fig.1. The expression of the PI+PR regulator based on the synchronous rotating dq rotating coordinate to eliminate 5th , 7th harmonic components on the stationary a-b-c coordinate, is shown as Equ.(2). And the expression to eliminate 11th and 13th harmonic components can also be got with the same discretization method.
6r 66i6r ()2cos(6)(1)(2) [()cos(6)(1)]y n T y n y n k e n T e n ωω=---+
-- (2) Experiment platforms are built to verify the
correction and feasibility of the proposed strategy. The parameters are shown in Tab.1.
Tab.1 Parameters for SPMSM servo
Parameter Value Stator resistance R /Ω 0.46
L d , L q /mH 2.37 Motor’s pole pairs p n
4
Rotor inertia J m /(10-3
kg ?m 2
) 0.3 Flux of the permanent magnet ψf /Wb
0.142 DC bus voltage/V 400 Switching frequency/kHz
10
Dead time/μs 3
The current waveforms of the conventional PI and the proposed current regulators are shown in Fig.2. The motor speed is 300 r/min, and the load is 1.3 N ?m.
The experiment results show that, the proposed control strategy can improve the current wave and the static and dynamic performances of the servo system with SPMSM. The proposed control strategy is simple and robust, and easy to be achieved with a digital signal processor (DSP).
t (25 ms/div)
(a) Conventional strategy i a (2 A /d i v )
(b) Proposed strategy
i a (2 A /d i v )
Fig. 2 Current waveforms of the experiment platform
爪极永磁同步电机的设计特点
爪极永磁同步电机的设计特点 李开成张健梅(华中理工大学武汉430074) 【摘要】介绍爪极永磁同步电机转子的结构及设计特点,并说明了一些主要结构尺寸间的关系。 【叙词】永磁电机同步电机设计 1引言 爪极永磁同步电机的永久磁铁形状简单,极间漏磁大,磁铁过载能力强,机械强度高,普遍用于变流机和变频机,发电机的制造容量自数百瓦到数千瓦。当频率在1000Hz以内时,制造容量可达数十千伏安。这种电机由于转子采用爪极结构,而爪极的形状又可多种多样,因此,较普通永磁同步电机计算复杂。这种电机的分析和设计,在国内外文献中介绍较少。本文介绍爪极永磁同步电机的设计特点及爪极转子的设计。 2爪极式转子的结构及其特点
爪极式转子通常由两个带爪的法兰盘和一个圆环形永久磁铁组成,如图1所示。图la和c为左右两个带爪子的法兰盘,二者爪数相等,且等于极数的1/2。图lb为圆环形磁铁沿转子轴向充磁。图ld为装配图,左右为两个法兰盘对合,二者爪子互相错开,沿圆周均匀分布。圆环形永久磁铁夹在两个带爪法兰盘中间,使一个法兰盘上的爪子皆为N极性,另一个法兰盘上的爪子皆为S极性,形成如图le所示的多极转子结构。显然,法兰盘上的爪子起了极靴的作用。 爪极永磁同步电机中,电机的全部磁通(P对极)轴向穿过圆环形磁铁,进入爪极,经气隙进入定子,爪极中的磁路如图2所示。 爪极通常由10号钢制成,或由钢板冲成,也可由粉末冶金直接压制成形。由于磁通轴向通过爪子,爪子的每一截面通过的磁通不相等,爪尖最少,爪根最多。爪子的截面积沿电机轴向是变化的,爪尖部分的面积最小,爪根部分最大。爪极的形状多种多样,有等宽爪极、梯形爪极,还有正弦爪极。图3为梯形爪极形状。
永磁同步电机计算
永磁同步电机设计 1电机仿真模型 (a )原型电机(b )新型电机 图1PM-Y2-180-4电机整体有限元仿真模型 图2新型电机转子1/4模型 2静态有限元仿真结果比较 2.1永磁磁场分布 当永磁体单独作用时,两种电机的磁力线分布如图3所示。 (a )原型电机(b )新型电机 图3两种电机永磁磁场分布 2.2永磁气隙磁密波形 当永磁体单独作用时,两种电机一个周期范围(即一对永磁体范围)的永磁气隙磁密波形如图4所示。 (a )原型电机 (b )新型电机 (c )两种电机比较 图4两种电机永磁气隙磁密分布 3空载稳态有限元仿真结果比较 3.1空载永磁磁链、空载永磁反电势波形 空载情况下,两种电机的三相绕组电流均设置为零,电机中磁场由永磁体单独产生。设置电机稳态运行转速为n =3000r/min ,可得到两种电机的空载永磁磁链、空载永磁反电势波形分别如图5、图6所示。由于三相绕组对称,在此仅给出A 相绕组仿真结果。 图5两种电机空载永磁磁链 图6两种电机空载永磁反电势 3.2空载永磁磁链、空载永磁反电势谐波分析 利用Matlab 对图5、图6的波形进行傅里叶分析,可得到两种电机磁链及反电势的各次谐波分量,如图7所示。 (a )空载永磁磁链(b )空载永磁反电势 图7磁链及反电势谐波分量分析 通过对两种电机的空载永磁磁链和空载永磁反电势进行谐波分析,得到以下结论:(1)3次谐波分量是主要谐波分量;(2)偶次谐波分量几乎为零,奇次谐波分量相对较大;(3)采用新型电机结构可在一定程度上削弱3次谐波分量,但同时会引起5、7次谐波分量增加,总体削弱谐波效果并不明显。 4负载稳态有限元仿真结果比较 4.1电枢绕组通入三相对称电压 两种电机具有相同的参数如下:电阻R =0.0410947?,电感L =5.87143?10?5H ,额定转速n =3000r/min 。给电枢绕组通入三相对称电压: A B C 310.269sin(20035.3581/180) 310.269sin(20035.3581/1802/3)310.269sin(20035.3581/1802/3) u t u t u t ππππππππ=+=+-=++(1) 并进行有限元仿真,得到两种电机的绕组电流及转矩波形,分别如图8、图9所示。 (a )原型电机 (b )新型电机 图8两种电机绕组电流波形
表贴式永磁同步电机无速度传感器混合控制
第48卷 2015年 第6期6月 MICROMOTORS Vol.48.No.5 Jun.2015 表贴式永磁同步电机无速度传感器混合控制 冯 慧1,王念兴2,姜淑忠1,李小海1 (1.上海交通大学电子信息与电气工程学院,上海200240;2.大庆油田力神泵业有限公司,黑龙江大庆163311) 摘 要:针对表贴式永磁同步电机(SPMSM)重载起动、全速范围内无传感器控制,提出了一种新型的混合控制方法。电机低速时用脉动高频信号注入法;高速时用改进滑模观测器法,用饱和函数代替开关函数来减弱滑模算法的固有抖振,设计截止频率随转速可变的滤波器从而实现补偿角的定值化。提出了结合两种方法优点,在两种方法之间的平滑切换的算法。仿真结果表明,该混合控制器方法可以准确观测转子位置和速度,实现电机的无传感器控制,系统具有良好的稳定性和鲁棒性。 关键词:表贴式永磁同步电机;无速度传感器控制;脉动高频注入法;滑模观测器 中图分类号:TM351;TM341 文献标志码:A 文章编号:1001-6848(2015)06-0051-04 SensorlessHybridControlofSPMSM FENGHui1,WANGNianxiing2,JIANGShuzhong1,LIXiaohai1 (1.SchoolofElectronicInformationandElectricalEngineering,ShanghaiJiaoTongUniversity, Shanghai200240,China;2.DaqingOilfieldPowerliftPumpIndustryCo.,Ltd., DaqingHeilongjiang163311,China) Abstract:Anovelsensorlesshybridcontrolmethodofsurfacepermanentmagnetsynchronousmotor(SPMSM)withhighstarttorqueinawidespeedrangewasproposed.Theproposedhybridcontrolcombinesafluctuatinghigh-frequencysignalinjectionatlowspeedwithamodifiedsliding-modeobserverathigh speed.Tosolvethechatteringproblem,thesignfunctionwasreplacedbyasaturationfunction.Inordertocompensatethephase-angledelayovertheentirespeedrange,alowpassfilterwithacut-offfrequency changingwiththerotorspeedwasdesigned.Basedonthemeritsofbothtwomethods,thehybridcontrolcanachievethesmoothswitchingbetweenthetwomethods.Thesimulationresultsvalidatethattheproposedalgorithmcanestimatetherotorpositionandspeed,andthatthecontrolsystemisstableandrobust.Keywords:SPMSM;senselesscontrol;fluctuatinghigh-frequencysignalinjection;sliding-modeobserver 收稿日期:20140626 0 引 言 永磁电机因高效率、高功率密度、伺服性能优越,在传统的电气传动及新兴的运动控制系统中应用日益广泛。永磁电机的主要控制算法是磁场定向控制,通过位置传感器测量转子磁极的位置,借助三相逆变器控制三相绕组的合成磁场,让定转子磁场保持垂直并相对静止,获得与有刷直流电机相似的机械特性。但是传感器的成本、应用环境等因数限制了传感器的使用,如油田的抽汲设备、水下机器人、电动汽车的空调压缩机等。在这些环境中, 永磁电机的无位置传感器应用研究更有现实意义[1] 。 永磁电机无位置传感器的研究主要集中在内嵌式永磁电机(IPMSM),因为这种结构的电机交轴、直轴的电感不同,在高频电压信号的激励下,可以在反馈的高频电流信号中提取出转子位置信息。而对表贴式永磁电机(SPMSM)的无传感器控制的研究则着重于电机高速运行状态,如定子磁链计算、反 电动势预估等[2-3] 。由于SPMSM不具有凸极性,低速时采用的高频信号注入法不适用[4]。低速时经常 采用的开环运行方法,对于空载或轻载起动的情况是可行的,但是当电机重载起动时,开环转矩不够大,难以起动。 有的学者根据SPMSM磁饱和凸极效应,运用脉
表贴式永磁同步电机伺服系统电流环设计_王恩德
第32卷第33期中国电机工程学报V ol.32 No.33 Nov.25, 2012 82 2012年11月25日Proceedings of the CSEE ?2012 Chin.Soc.for Elec.Eng. 文章编号:0258-8013 (2012) 33-0082-07 中图分类号:TM 351 文献标志码:A 学科分类号:470 40 表贴式永磁同步电机伺服系统电流环设计 王恩德,黄声华 (强电磁工程新技术国家重点实验室(华中科技大学),湖北省武汉市 430074) Current Regulator Design for Surface Permanent Magnet Synchronous Motor Servo Systems WANG Ende, HUANG Shenghua (State Key Laboratory of Advanced Electromagnetic Engineering and Technology (Huazhong University of Science and Technology), Wuhan 430074, Hubei Province, China) ABSTRACT: The current control loop directly affects the current of the surface permanent magnet synchronous motor (SPMSM) and the electromagnetic torque, which makes the static and dynamic performance of the motor deteriorate. The decoupling control cannot be realized with the changes of the motor’s inductance parameters due to saturation effects when the operating condition changes. This paper proposed a decoupling control to improve the dynamic performance, without the inductance value with the perspective of complex vector. As the dead zone, the motor manufacturing process and the magnetic saturation, the servo system current often contains low-order harmonics, such as 5th, 7th, 11th, 13th, which produce torque ripple and affect the motor’s performance. The current regulation with the proportional Integral and proportional resonance based on the synchronous rotating dq coordinate was used for the closed loop control of the low harmonic currents, to improve the system performance. Simulation and experimental results verify the feasibility of the schemes proposed by this paper. KEY WORDS: surface permanent magnet synchronous motor (SPMSM); synchronous dq coordinate; complex vector; decoupling control; proportion resonance 摘要:电流环直接影响表贴式永磁同步电机(surface permanent magnet synchronous motor,SPMSM)伺服系统的电流波形和电磁转矩,使系统的动、静态性能变差。当系统运行工况变化使得电机电感饱和时,电流环中含有电感参数的解耦项就会失效。从合成矢量的角度出发,提出了一种同步dq旋转坐标系下无需电感参数的电流解耦调节器,实现了无电感参数解耦控制,改善了SPMSM系统的动态性能。另外,由于死区、电机制造工艺、磁场饱和等原因,电机电流中含有影响系统性能的5、7、11、13等低次谐波。提出了同步旋转dq坐标系下比例积分+比例谐振(proportional integral + proportional resonance,PI+PR)的电流复合调节器,对低次电流谐波进行闭环调节,从而显著减小了谐波电流,改善了系统性能。仿真分析和实验结果均验证了该方案的可行性。 关键词:表贴式永磁同步电机;同步旋转dq坐标系;合成矢量;解耦控制;比例谐振 0 引言 表贴式永磁同步电机(surface permanent magnet synchronous motor,SPMSM)的永磁体产生与转子同步旋转的正弦波磁场,通过编码器获得转子位置后就能方便地实现基于转子磁链解耦的矢量控制,达到等同于直流伺服系统的控制精度。SPMSM具有功率密度高、损耗小、电气时间常数小等优点,加之近年来数字控制芯片的快速发展,使得基于SPMSM的数字交流伺服系统广泛应用于数控机床、航空航天等领域[1,2]。 应用场合的多样化和复杂性,也对伺服系统的静、动态控制性能提出了更高的要求。基于SPMSM 的伺服控制系统是一个包含位置环、速度环和电流环的多闭环系统。其中,作为最内环的电流环决定了电流的跟踪性能,直接影响SPMSM的输出转矩,对伺服系统的控制性能起着非常重要的作用。文献[3-4]分析了永磁同步电动机控制的电流环,并设计了调节器参数,其中文献[3]引入微分环节和过调制技术,文献[4]分析了电流环3种控制方法的利弊,并提出适用于工程实践的设计方案。为了简化分析,文献[3-4]均忽略了耦合项,但这样会导致系统的动态性能变差。文献[5]从电流环带宽的角度出发,提出了带宽扩展策略,提高了伺服系统的动态性能,虽然考虑了耦合项,但没有考虑电感变化对解耦控制的影响。文献[6]提出了一种基于合成矢量的无需电感参数的解耦控制策略,取得了较好的控 DOI:10.13334/j.0258-8013.pcsee.2012.33.013
调速永磁同步电动机的电磁设计与磁场分析
调速永磁同步电动机的电磁设计与磁场分析 1 引言 与传统的电励磁电机相比,永磁同步电动机具有结构简单,运行稳定;功率 密度大;损耗小,效率高;电机形状和尺寸灵活多变等显著优点,因此在航空航 天、国防、工农业生产和日常生活等各个领域得到了越来越广泛的应用。 随着电力电子技术的迅速发展以及器件价格的不断下降,越来越多的直流电 动机调速系统被由变频电源和交流电动机组成的交流调速系统所取代,变频调速 永磁同步电动机也应运而生。变频调速永磁同步电动机可分为两类,一类是反电 动势波形和供电电流波形都是理想矩形波(实际为梯形波)的无刷直流电动机,另 一类是两种波形都是正弦波的一般意义上的永磁同步电动机。这类电机通常由变 频器频率的逐步升高来起动,在转子上可以不用设置起动绕组。 本文使用Ansoft Maxwell 软件中的RMxprt 模块进行了一种调速永磁同步电 动机的电磁设计,并对电机进行了性能和参数的计算,然后将其导入到Maxwell 2D 中建立了二维有限元仿真模型,并在此模型的基础上对电机的基本特性进行 了瞬态特性分析。 2 调速永磁同步电动机的电磁设计 2.1 额定数据和技术要求 调速永磁同步电动机的电磁设计主要包括主要尺寸和气隙长度的确定、定子 冲片设计、定子绕组的设计、永磁体的设计等。通过改变电机的各个参数来提高 永磁同步电动机的效率η、功率因数cos ?、起动转矩st T 和最大转矩max T 。本例所设计永磁同步电动机的额定数据及其性能指标如下: 额定数据 数值 额定功率 N 30kw P = 相数 =3m 额定线电压 N1=380V U 额定频率 =50Hz f 极对数 =3p 额定效率 N =0.94η 额定功率因数 N cos =0.95? 绝缘等级 B 级 计算额定数据:
PMSM电流环速度环位置环设计与实现中的心得体会
一:电流环参数的调节 1:PMSM传动控制系统中,电机运行速度范围很宽,电流频率范围从零到上百赫兹,要在这么宽的频率范围内准确地检测电机电流,常选用霍尔元件实现电机电流的检测。 霍尔检测方法优点:动态响应好,信号传输线性及频带范围宽等优点。 为保证电机对称运行,电流三相各反馈信道的反馈系数必须相等,这就要精心选择调理电路组件,仔细调整反馈回路参数。信号调理电路使用模拟放大器时,放大器的零漂是影响电机低速运行性能的主要因素,要仔细调整放大器,将零点漂移控制在10mv以内。 2:PMSM调速系统需要电机有很宽的调速范围,达到10^4:1以上,要在这么宽的速度范围内检测出电机的速度,以实现调速系统的控制确实是个很重要的问题。尽管T法在低速时有很好的测速精度,但研究调速系统控制的论文极少见使用(T或M/T)法测速的,基本上都是采用M法测速。实际上,当电机处于极低转速时,电机能否稳定运行不仅仅取决于位置传感器及其所送来的脉冲信号,还有速度调节器的作用,以及电流环与电机转子惯性环节的影响,所以,M法仍可用于低速范围内电机速度的检测与反馈。 3:电流调节器参数对电流环的动态响应具有决定性影响。 电流调节器比例系数越大,电流阶跃跟踪响应速度越快,响应的超调越大,振荡次数越多。电流调节器的积分系数越大,电流阶跃跟踪响应的稳态误差越小,但太大会引起电流环振荡。 PMSM调速控制系统的电流环控制对象为PWM逆变器、电机电枢绕组、电流检测环节组成。在实际系统运行过程中,电流环的相应受电机反电势的影响,电流环动态响应不好,为提高永磁同步电机调速系统电流环动态响应性能,抑制反电动势对电流环的影响,在实际系统电流调节器制作时,比例和积分系数均做了调整,增大比例系数,减小积分时间常数。 电流环响应若不加微分负反馈环节,电流环动态响应将会出现振荡与超调。然而实际应用中,通常不加微分反馈环节,因为微分极易引起系统的振荡。而且按照电流环I型系统的校正原则,采用PI控制才能实现电流环系统的稳定性和高动态响应。 二、速度环参数的调节 采用II型系统设计的速度环,实际应用中,在速度阶跃过程中,速度调节器会出现饱和,系统的实际运行情况和设计时所采用的线性对象具有很大的差别,调节器设计时的初始条件和实际系统退饱和后调节器参与调节时的初始条件有很大差别。因此按照II型系统设计的速度环需要作很大的调整才能满足实际系统的需要。但该设计方法关于调节器的形式选择仍然适用。 从自动控制原理可知,调速控制系统的速度超调是使用PI调节器并要求有快速响应的必然结果,原因是速度调节器要退出饱和,参与调解。 随着速度调节器输出限幅的增加,速度响应加快,到达指定速度时的振荡程度增加。输出限幅数值决定电机在动态过程中加速力矩的大小,影响电机在加减速过程中的加速度,影响调速系统的速度响应过程。输出限幅值要合理设置,应该充分利用电机的过载能力,以提高调速控制系统的速度响应性能。同时,在调速控制系统中可设置速度微分负反馈(肖老师建议速度环一般不要加前馈),可以
异步起动永磁同步电机设计
Ansoft EM专题讨论(三)——异步启动永磁同步电机设计最近有感于论坛Ansoft版区学习的氛围越来越好了,这与各位版主的努力都是分不开的。看到前面两个专题中,我们的超版和技术精英们都做了很多工作,本着向大家学习的原则,我也来凑个热闹 本人在读研期间曾经涉猎过这种电机的设计与仿真,下面就把我很久以前做的一个练习分享给大家。做的不一定对,希望大家多多批评指正!这也是和大家学习的过程,望各位不吝赐教 其实,这种电机在实际设计过程中需要注意的问题还是很多的。很遗憾在校期间没能彻底解决这个领域的一些问题。这里也希望大家广泛针对该类电机的设计进行讨论和交流,向大家学习了! 下面先给出电机结构示意图 电机为典型的4极36槽结构,绕组为单层交叉,Y接形式,内置径向W型永磁体,采用冲片类型为DW315-50。具体的其他的电机参数将在RMxprt设计中给出区别于前面两位版主的纯V11仿真,该算例采用了Ansoft RMxprt V5.0版本与Maxwell V11.1版进行了简易的联合2D仿真。对新人而言,V5.0的界面更加人性化和易于上手,推荐新同学使用。 运用Ansoft RMxprt V5.0进行基本的电磁设计,输入相应电机参数反复调试运行。下面给出本例的参数设置
基本参数 定子内外径和槽形尺寸
转子内外径和磁钢设计
转子槽形和端环设计 以上需要补充说明的是Ansoft RMxprt V5.0的材料设置问题和绕组编辑问题 就材料设置而言,大家可以利用软件自带的.h-b文件自行添加所需要的硅钢片材料,主要是需要查找一些手册来添加磁化曲线和损耗曲线,用记事本的格式进行编辑添加,放在指定的文件夹中,即可在设计中引用,图例DW315-50的.h-b文件,要对应操作窗口的各项参数进行添加,方可正确使用
高速永磁同步电机电枢电流谐波分析
第20卷 第5期 2016年5月 电 机 与 控 制 学 报Electric Machines and Control Vol畅20No畅5May2016 高速永磁同步电机电枢电流谐波分析 于吉坤, 李立毅, 杜鹏程, 张江鹏 (哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001) 摘 要:在高速永磁同步电机谐波分析中,主要有解析和仿真两种方法。解析法则适用于连续系统,而仿真法适用于离散系统的,但两种方法之间关联性问题研究相对较少,针对此问题,提出一种基于空间矢量脉宽调制(SVPWM)技术电枢电流谐波解析法和仿真法内在关联的分析方法。根据连续函数和离散函数的傅里叶级数公式,分析了这两种方法在谐波计算中偏差的分布规律。分析结果表明,采样频率和负载是离散电枢谐波计算的主要影响因素,随着采样频率的升高电枢电流谐波呈现振荡阻尼衰减的特性,并收敛于连续系统的解析值,而负载则能降低振荡幅值和提高收敛速度。构建了基于DSP的永磁同步电机系统实验平台,实验结果验证了该分析方法的有效性。关键词:高速永磁同步电机;空间矢量脉宽调制;电枢电流;谐波分析;离散傅里叶变换DOI:10.15938/j.emc.2016.05.005 中图分类号:TM355文献标志码:A文章编号:1007-449X(2016)05-0028-09 收稿日期:2014-11-06 基金项目:国家杰出青年科学基金(51225702) 作者简介:于吉坤(1987—),男,博士研究生,研究方向为高速永磁电机的本体设计与特性分析; 李立毅(1969—),男,博士,教授,博士生导师,研究方向为特种电机及其控制; 杜鹏程(1988—),男,博士研究生,研究方向为高速永磁电机的驱动控制; 张江鹏(1985—),男,博士研究生,研究方向为高效率永磁电机的本体设计与特性分析。 通讯作者:李立毅Harmonicanalysisofarmaturecurrentforhighspeedpermanentmagnetsynchronousmotor YUJi-kun, LILi-yi, DUPeng-cheng, ZHANGJiang-peng (SchoolofElectricalEngineeringandAutomation,HarbinInstituteofTechnology,Harbin150001,China)Abstract:Therearetwomethodsinharmonicanalysisofthehighspeedpermanentmagnetsynchronousmotor,andtheyareanalyticalmethodandsimulationmethod.Theanalyticalmethodissuitableforcon-tinuoussystems,andthesimulationmethodfordiscretesystem.Astherelevanceofthesetwomethodshasbeenrarelystudied,onecorrelationanalysismethodwasproposed,whichisbasedonthespacevectorpulsewidthmodulation(SVPWM)technology.FromFourierseriesofthecontinuousfunctionandthediscretefunction,thedeviationdistributionlawbetweenthesetwomethodsintheharmoniccalculationwasanalyzed.Theanalysisresultsshowthatthemaininfluencefactorsofdiscreteharmoniccalculationofar-maturearesamplingfrequencyandloadcondition.Thearmaturecurrentharmonicsoscillatedampingat-tenuationwithincreaseinsamplingfrequencyandconvergetotheanalyticalresultsofthecontinuoussys-tem.Theoscillationamplitudeisreducedandtheconvergencespeedisimprovedbyload.ThepermanentmagnetsynchronousmotorsystemexperimentplatformbasedonDSPisconstructed,anditisconfirmedthatthecorrelationanalysismethodiseffective.Keywords:highspeedpermanentmagnetsynchronousmotor;spacevectorpulsewidthmodulation(SVP-WM);armaturecurrent;harmonicanalysis;discretefouriertransform(DFT)
Ansoft软件Maxwell2D中表贴式永磁同步电机激磁方向的快速设置
Ansoft软件Maxwell2D中表贴式永磁同步电机激磁方向的快速设置 作者:tobeno321 引言:Maxwell作为一款电磁仿真软件,给电机设计师们带来了极大的便利,但不少新手掌握起来还存在一些问题,本人针对这些问题,相应的做出了一些教程,仅供大家学习使用。本期我们讲解表贴式永磁同步电机激磁方向的便捷设置。 RM模块能够根据用户输入电机的参数,自动生成电机的结构,永磁体的形状以及能够满足电机仿真的其他必要条件,但由于软件的局限性,往往不能完全满足用户的需求,这时候用户会选择自己导入电机结构来满足自己的需求,在这个过程中,会遇到各种问题,这里我们针对设置永磁体激磁方向问题来进行讨论。 一.内置式(插入式)永磁电机永磁体激磁方向设置 此类永磁体形状(如图1所示)为规则的正方体结构,激磁方向设置方法相对简单,操作起来很快。 图1
操作步骤: 1.建立相对坐标系。首先,为了避免混淆,删除RM生成的所 有相对坐标系。如图2所示,点击,开始建立相对坐标系。 选择永磁体的一角为相对坐标系坐标原点(点1),选择永磁体实际激磁方向上的另外一点为系的终点(点2)。这样就建立起该块永磁体的激磁方向的相对坐标系。 图2 2.按照同样的方法设置其他几块永磁体激磁方向的相对坐标系,这里要注意,两块相邻的永磁体激磁方向要相反。 3.全部建完后,需要对永磁体的激磁方向进行选择。选中永磁体,打开属性对话框,在选择相对坐标系,具体如图3所示,各个永磁体按设置顺序选择12345五个相对坐标系。
图3 二.表贴式永磁电机永磁体激磁方向设置(平行充磁) 与内置式(插入式)永磁电机永磁体形状不同,表贴式永磁电机的永磁体的形状为弧形,不能够采用那种直接在永磁体上建立坐标系的方法,需要做出辅助线来帮助建立。这里以一台40极48槽电机为例进行说明。这里展示该电机的1/8模型(如图4)。 图4
永磁同步电机基础知识
(一) PMSM 的数学模型 交流电机是一个非线性、强耦合的多变量系统。永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。为了简化永磁同步电机的数学模型,我们通常做如下假设: 1) 忽略电机的磁路饱和,认为磁路是线性的; 2) 不考虑涡流和磁滞损耗; 3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波; 4) 驱动开关管和续流二极管为理想元件; 5) 忽略齿槽、换向过程和电枢反应等影响。 永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下: (l)电机在两相旋转坐标系中的电压方程如下式所示: d d s d d c q q q s q q c d di u R i L dt di u R i L dt ωψωψ?=+-????=++?? 其中,Rs 为定子电阻;ud 、uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc 为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链。 若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示。 cos sin 22cos()sin()3322cos()sin()33a d b q c u u u u u θθθπθπθπθπ?? ?-????? ??=--- ? ???? ???? ?+-+? ? (2)d/q 轴磁链方程: d d d f q q q L i L i ψψψ=+???=?? 其中,ψf 为永磁体产生的磁链,为常数,0f r e ωψ=,而c r p ωω=是机械角速度,p 为同步电机的极对数,ωc 为电角速度,e0为空载反电动势,其值为每项 倍。
永磁同步电机的原理及结构
完美格式整理版 第一章永磁同步电机的原理及结构 1.1永磁同步电机的基本工作原理 永磁同步电机的原理如下在电动机的定子绕组中通入三相电流,在通入电流后就会在电动机的定子绕组中形成旋转磁场,由于在转子上安装了永磁体,永磁体的磁极是固定的,根据磁极的同性相吸异性相斥的原理,在定子中产生的旋转磁场会带动转子进行旋转,最终达到转子的旋转速度与定子中产生的旋转磁极的转速相等,所以可以把永磁同步电机的起动过程看成是由异步启动阶段和牵入同步阶段组成的。在异步启动的研究阶段中,电动机的转速是从零开始逐渐增大的,造成上诉的主要原因是 其在异步转矩、永磁发电制动转矩、 矩起的磁阻转矩和单轴转由转子磁路不对称而引等一系列的因素共同作用下而引起的,所以在这个过程中转速是振荡着上升的。在起 动过程中,质的转矩,只有异步转矩是驱动性电动机就是以这转矩来得以加速的,其 他的转矩大部分以制动性质为主。在电动机的速度由零增加到接近定子的磁场旋转转速时,在永磁体脉振转矩的影响下永磁同步电机的转速有可能会超过同步转速,而出现转速的超调现象。但经过一段时间的转速振荡后,最终在同步转矩的作用下而被牵入同步。 1.2永磁同步电机的结构 永磁同步电机主要是由转子、端盖、及定子等各部件组成的。一般来说,永磁 同步电机的最大的特点是它的定子结构与普通的感应电机的结构非常非常的相似,主要是区别于转子的独特的结构与其它电机形成了差别。和常用的异步电机的最大不同则是转子的独特的结构,在转子上放有高质量的永磁体磁极。由于在转子上安放永磁体的位置有很多选择,所以永磁同步电机通常会被分为三大类:内嵌式、面贴式以及插入式,如图1.1所示。永磁同步电机的运行性能是最受关注的,影响其性能的因素有很多,但是最主要的则是永磁同步电机的结构。就面贴式、插入式和嵌入式而言,各种结构都各有其各自的优点。
表贴式调速永磁同步电动机径向磁拉力分析
万方数据
万方数据
万方数据
万方数据
表贴式调速永磁同步电动机径向磁拉力分析 作者:梁文毅, LIANG Wen-yi 作者单位:杭州易泰达科技有限公司,浙江,杭州,310053 刊名: 微特电机 英文刊名:SMALL & SPECIAL ELECTRICAL MACHINES 年,卷(期):2011,39(5) 参考文献(8条) 1.陈永校;诸自强;应善成电机噪声的分析和控制 1987 2.陈世坤电机设计 2000 3.黄礼文;王宗培电动机噪声理论和控制技术的进展[期刊论文]-电工技术学报 2000(10) 4.王泽忠;严烈通异步电机气隙谐波磁场的分解合成法[期刊论文]-华北电力学院学报 1994(09) 5.黄开胜;张城生;杨杰笼型感应电动机电磁噪声及其控制 1995(06) 6.秦萌青;唐会智交流电机中的两种谐波磁场 1998(06) 7.李伟异步电动机的噪声控制[期刊论文]-防爆电机 2005(02) 8.Wang J;Xia Z P;Long S A Radial force density and vibration characteristics of modular permanent magnet brushless AC machine[外文期刊] 2006(06) 本文读者也读过(10条) 1.王广生.黄守道.高剑.WANG Guang-sheng.HUANG Shou-dao.GAO Jian永磁同步电动机过载特性及其控制策略[期刊论文]-电机与控制应用2011,38(5) 2.鲍庭瑞.姚春元三相永磁同步伺服系统的初始定位[期刊论文]-铜陵学院学报2008,7(3) 3.刘伟.陈丽香.唐任远定子齿顶开辅助槽削弱永磁电机齿槽转矩的方法[会议论文]-2009 4.李勇.姜新通.史庆夫.酒晨霄.刘彦彬.陆永平.LI Yong.JIANG Xin-tong.SHI Qing-fu.JIU Chen-xiao.LIU Yan-bin.LU Yong-ping基于Ansoft 的IPM永磁同步电动机磁场计算[期刊论文]-微特电机2011,39(6) 5.赵君.刘卫国.骆光照.曾重.赵跃齐.ZHAO Jun.LIU Wei-guo.LUO Guang-zhao.ZENG Zhong.ZHAO Yue-qi一种矿用机车永磁同步交流牵引系统设计与实现[期刊论文]-微特电机2010,38(10) 6.李天平.LI Tianping一种高速涡轮冷却风扇电动机的设计[期刊论文]-微电机2011,44(3) 7.林岩.王震宇.杨小峰.申修沇.Lin Yan.Wang Zhenyu.Yang Xiaofeng.Shen Xiuyan空调器用正弦波调速永磁同步电动机的开发与可靠性分析[期刊论文]-电气技术2010(11) 8.唐任远.徐广人.徐衍亮.陶爱华.安忠良电机用永磁体局部工作点及局部失磁研究[会议论文]-1998 9.孙剑波.詹琼华开关磁阻电动机的径向力计算[期刊论文]-微特电机2005,33(1) 10.杨云峰.李丽石油钻机用永磁同步电动机电磁场有限元分析[期刊论文]-机电一体化2011,17(3) 本文链接:https://www.sodocs.net/doc/079421831.html,/Periodical_wtdj201105007.aspx
永磁同步电动机电流环矢量控制文档
永磁同步电动机的数学模型和矢量控制 1.坐标变换原理 (1)坐标系介绍 三种:三相静止坐标系(abc)、两相静止坐标系(αβ)以及同步旋转坐标系(dq)(2)坐标变换 主要目的是为了将交流电机的物理模型等效地变成直流电机的物理模型,使控制大大简化。不同电机模型等效的原则是:在不同坐标系下产生的磁动势相同。 三相静止坐标系与两相静止坐标系之间转换 为方便起见,取α轴与A轴重合,设三相系统每相绕组的有效匝数为N 3 ,两 相系统每相绕组的有效匝数为N 2 ,各相磁动势均为有效匝数及其瞬时电流的乘积。交流电流的磁动势大小随时间耳边,图中磁动势矢量的长短是任意画的。设磁动势波形是正弦分布,当三相磁动势与两相磁动势相等时,两套绕组瞬时磁动势在α、β上的投影应当相等。 为了便于求反变换,最好将变换阵表示成可逆的方阵。为此,在两相系统上人为 地增加一相零轴磁动势N 2i ,并定义为 将以上三式合在一起,写成矩阵形式,得 式中 是三相坐标系变换到两相坐标系的变换阵。满足功率不变条件时应有
显然,两矩阵的乘积应该为单位阵, 由此求得 这就是满足功率不变约束条件时的参数关系。由此得到 在实际电机中并没有零轴电流,因此实际的电流变换式为 如果三相绕组是星形不带零线接法则 整理得
●两相静止/两相旋转变换 ●由三相静止坐标系到任意两相旋转坐标系上的变换
2.永磁同步电动机的数学模型 当永磁同步电动机的定子通入三相交流电I时,电枢电流在定子绕组电枢电阻 R 上产生电压降IR。由三相交流电流I产生的旋转电枢磁动势Fa,及建立的电S 枢磁场aφ,一方面切割定子绕组并在定子绕组中产生感应反电动势a E,另一方面以电磁力拖动转子以同步转速n 旋转。电枢电流I还会产生仅与定子绕组相交 s 链的定子绕组漏磁通。并在定子绕组中产生感应漏电动势Eσ。此外转子永磁极 产生的磁场0φ以同步转速切割定子绕组,从而产生空载电动势0E。因此永磁同步电动机运行时的电磁关系如下所示:
中小型表贴式永磁电机的制造工艺
中小型表贴式永磁电机的制造工艺 我国稀土资源丰富,永磁材料的性价比不断提高,尤其是钕铁硼永磁材料的快速发展,为永磁电机的市场化提供了支撑。永磁电机采用永磁材料励磁,在具有同等性能的条件下永磁电机可比常规电机小一至两个机座号,体积重量优势明显。特别是永磁电机无励磁损耗,电机效率高,节能降耗优势明显,其市场潜力巨大。 但是永磁电机的制造工艺与常规电机有较大差别,特别是永磁电机的结构型式较多,不同结构的永磁电机其制造工艺也不同。永磁电机包括永磁直流电机、异步起动永磁电机、永磁无刷直流电机和永磁同步电机,永磁直流电机定子上安装有永磁体,其余交流永磁电机转子上装有永磁体。永磁电机按照其磁路特点主要可分为切向式磁路结构和径向式磁路结构,当然也有切向和径向组合的混合式磁路结构;按照永磁体安装方式可分为表贴式和内置式(又称嵌入式)两种型式。采用表贴式磁路结构的永磁电机,一般称为表贴式永磁电机,采用内置式磁路结构的永磁电机一般称为内置式永磁电机。 目前,国内制造的永磁电机多为内置式磁路结构,其结构简单,工艺实施较为成熟,国内有不少厂家对内置式结构的永磁电机制造都很有经验。相比内置式永磁电机而言,表贴式永磁电机其径向等效气隙较大,电枢反应较小,磁场波形和电流电压波形畸变率较小,振动噪声性能优良,国外如法国热蒙公司、德国西门子公司研发的永磁电机均为表贴式磁路结构,国内开发的高性能调速永磁电机也主要采用表贴式磁路结构。 以下主要介绍中小型表贴式永磁电机的制造和装配工艺,主要包括磁钢安装工艺、转子绑扎及烘焙工艺、动平衡工艺、电机总装工艺等。 一、磁钢安装工艺 表贴式永磁电机通常采用专用工装进行磁钢的定位和安装,用磁钢专用胶对磁钢进行粘接,具体实施方法如下。 1、安装前的准备 首先清理安装场地,设置围栏,确保工作台面无铁屑杂质,并准备非导磁支撑架、非导磁螺丝刀和扳手、橡皮泥、磁钢专用胶、与磁钢尺寸一致的非导磁工件、磁钢安装用工装等。清点电机安装用磁钢,检查磁钢有无破损,并用特斯拉计或者指南针确认待安装磁钢的极性,用记号笔做好标识。 2、安装定位块 将永磁电机转子的一侧端板用螺钉安装至转子轮毂上,螺钉应涂抹螺纹紧固胶。根据转子工件的划线安装定位块,清理磁钢安装面,并用与磁钢尺寸一致的非导磁工件检查磁钢安装空间是否合适,确保磁钢安装顺利进行。 3、安装磁钢 由于转子是由很多磁钢小块组成的,因此需按照图纸要求的磁钢极性分块安装,在转子端板上做好N、S极性标志,取小块磁钢涂抹磁钢专用胶,并在磁钢安装面也同时涂抹磁钢专用胶,将磁钢沿定位块形成的安装空间推入至安装位,由于磁钢和转子轮毂间存在吸力,因此松手后磁钢并不会移动。然后安装沿圆周方向相邻一极的极性相反的单块磁钢,方法同上。直到把圆周方向一圈的磁钢安装完成,然后再安装圆周方向下一圈的磁钢。在安装第一圈磁钢的过程中基本没有什么难度,在之后磁钢安装的过程中会由于磁钢之间的作用力而使得磁钢之间存在间隙,此时需用工装将磁钢推入安装空间,使之与先前安装的磁钢轴向无间隙。保持几分钟,待胶固化后即可松开磁钢及工装。 4、用特斯拉计或者指南针检查安装好的磁钢极性,确保无误后安装转子端板等其他零件
表贴式永磁同步电机磁极优化建模与分析
Modeling and Analyzing of Surface-Mounted Permanent-Magnet Synchronous Machines With Optimized Magnetic Pole Shape Zhenfei Chen1,Changliang Xia1,2,Qiang Geng2,and Yan Yan1 1School of Electrical Engineering and Automation,Tianjin University,Tianjin300072,China 2Tianjin Key Laboratory of Advanced Technology of Electrical Engineering and Energy,Tianjin Polytechnic University, Tianjin300387,China Two types of eccentric magnetic pole shapes for optimizing conventional surface-mounted permanent-magnet(PM)synchronous machines with radial magnetization are presented in this paper.An analytical method based on an exact subdomain model and discrete idea is proposed for obtaining the air-gap?ux density distribution in the improved motor.Cogging torque and back EMF analytical models are further built with the?eld solution,which provide useful tools for investigating motor performances with unequal thickness magnetic poles.The accuracy and feasibility of the models have been validated by a?nite element method.Based on the analytical models,the effects of pole shape parameters on motor performance are investigated.Results show that both pole shapes can perfect magnetic?eld distribution,decrease harmonic content of back EMF,reduce torque ripples,and improve the utilization of PMs. Index Terms—Exact subdomain model,?ux density distribution,magnetic pole shape optimization,surface-mounted permanent-magnet(PM)synchronous machine. I.I NTRODUCTION T HE surface-mounted permanent-magnet(PM) synchronous machine has been widely used in elevator,wind turbine,and hybrid electric vehicle applications due to its high ef?ciency,power factor,and torque density [1],[2].The PM pole,as a pivotal part of the PM motor, directly affects motor cost and behavior,such as magnetic ?eld,back EMF,torques,and so on.As a result,magnetic pole design is particularly important in PM motor design and has attracted lots of attention.Studies in[3]–[6]point out that the contributions of different PM parts are not uniform and magnetic pole optimization can not only improve PM material utilization,reduce magnet material cost,but also achieve more sinusoidal magnetic?eld distribution and lower cogging torque performance. The magnetic?eld calculation is an important prerequisite for the analysis of PM machines.Many methods have been proposed for magnetic?eld prediction in past few decades. In[7],the drawbacks and stability of numerical implementa-tion are discussed and a semianalytical framework is presented for solving2-D PM machine models in three different coordi-nates.Nevertheless,analytical modeling is usually much more complex for improved PM motors with optimized magnetic pole con?gurations,since the radial thickness of magnetic pole changes with the circumferential position,which makes its mathematical modeling more dif?cult than that of conven-tional magnetic poles.Several analytical methods are given in[8]–[10],which provide valuable theoretical references for magnetic pole design and analysis.Stator slotting is usually neglected or complicated pole boundary is simpli?ed to reduce the dif?culty of modeling,which also results in a low accuracy of the models. Manuscript received March3,2014;revised May11,2014;accepted May24,2014.Date of current version November18,2014.Corresponding author:C.Xia(e-mail:motor@https://www.sodocs.net/doc/079421831.html,). Color versions of one or more of the?gures in this paper are available online at https://www.sodocs.net/doc/079421831.html,. Digital Object Identi?er 10.1109/TMAG.2014.2327138Fig.1.PM pole shapes.(a)Conventional pole shape S0.(b)Outer arc eccentric pole shape SA.(c)Inner arc eccentric pole shape SB. In this paper,two types of eccentric magnetic pole designs are chosen for pole shape optimization of surface-mounted PM machines with radial magnetization.To solve the problem of unequal thickness magnetic pole modeling,a modi?ed subdomain model method based on discrete idea is proposed to predict magnetic?eld distribution in the air-gap.With the ?eld solution,cogging torque and back EMF models are built. The effects of magnetic pole dimensions on motor behavior are further investigated to draw some conclusions. II.A NALYTICAL M ODELING A.Eccentric Magnetic Pole Shapes Compared with the conventional magnetic pole,two kinds of eccentric magnetic pole shapes for improving the?eld distribution of surface-mounted PM motors are shown in Fig. 1.Fig.1(a)is the conventional magnetic pole shape designated as S0,Fig.1(b)is the outer arc eccentric magnetic pole shape designated as SA,and Fig.1(c)is the inner surface arc magnetic pole shape designated as SB. As shown in Fig.1,O is the center of motor and h m is the magnet thickness at the pole centerline.For conventional pole shape S0,its inner and outer arcs have the same centre O and the radial thickness does not change with position. R r and R m are the radii of magnet inner and outer surfaces,and h m=R m?R r.For the shape SA,the center of its outer arc moves to O and the radius changes to be R o.For the shape SB,the center of its inner arc moves to O ,and the radius 0018-9464?2014IEEE.Personal use is permitted,but republication/redistribution requires IEEE permission. See https://www.sodocs.net/doc/079421831.html,/publications_standards/publications/rights/index.html for more information.