Efficient Human Pose Estimation from Single Depth Images

Efficient Human Pose Estimation
from Single Depth Images
Jamie Shotton,Senior Member,IEEE,Ross Girshick,Andrew Fitzgibbon,Senior Member,IEEE, Toby Sharp,Senior Member,IEEE,Mat Cook,Mark Finocchio,Richard Moore,Member,IEEE, Pushmeet Kohli,Antonio Criminisi,Alex Kipman,and Andrew Blake,Fellow,IEEE Abstract—We describe two new approaches to human pose estimation.Both can quickly and accurately predict the3D positions of body joints from a single depth image without using any temporal information.The key to both approaches is the use of a large, realistic,and highly varied synthetic set of training images.This allows us to learn models that are largely invariant to factors such as pose,body shape,field-of-view cropping,and clothing.Our first approach employs an intermediate body parts representation,
designed so that an accurate per-pixel classification of the parts will localize the joints of the body.The second approach instead directly regresses the positions of body joints.By using simple depth pixel comparison features and parallelizable decision forests,both approaches can run super-real time on consumer hardware.Our evaluation investigates many aspects of our methods,and compares the approaches to each other and to the state of the art.Results on silhouettes suggest broader applicability to other imaging
modalities.
Index Terms—Computer vision,machine learning,pixel classification,depth cues,range data,games
?
1I NTRODUCTION
T HE fast and reliable estimation of the pose of the human body from images has been a goal of computer vision for decades.Robust interactive pose estimation has applica-tions including gaming,human-computer interaction,se-curity,telepresence,and even health care.The recent availability of high-speed depth sensors has greatly simplified the task[1],[2],[3],[4],[5],[6].However,until the launch of the Microsoft Kinect camera and gaming platform[7]in November2010,even the best systems exhibited failures when faced with unusual poses,occlu-sion,sensor noise,and the constraints of super-real-time operation(i.e.,with a budget of a fraction of the total processor cycles).
This paper describes some of the research behind a core component of the skeletal tracking pipeline that ships with Kinect[7].The aim of shipping a consumer product necessitated two important design goals:robustness and computational efficiency.We wanted to build something that could work without calibration for any human body shape so that anyone could start using the system immediately.The system also had to be able to run for hours at a time without failing catastrophically.Our final requirements came in the form of tight budgets for compute and memory usage.
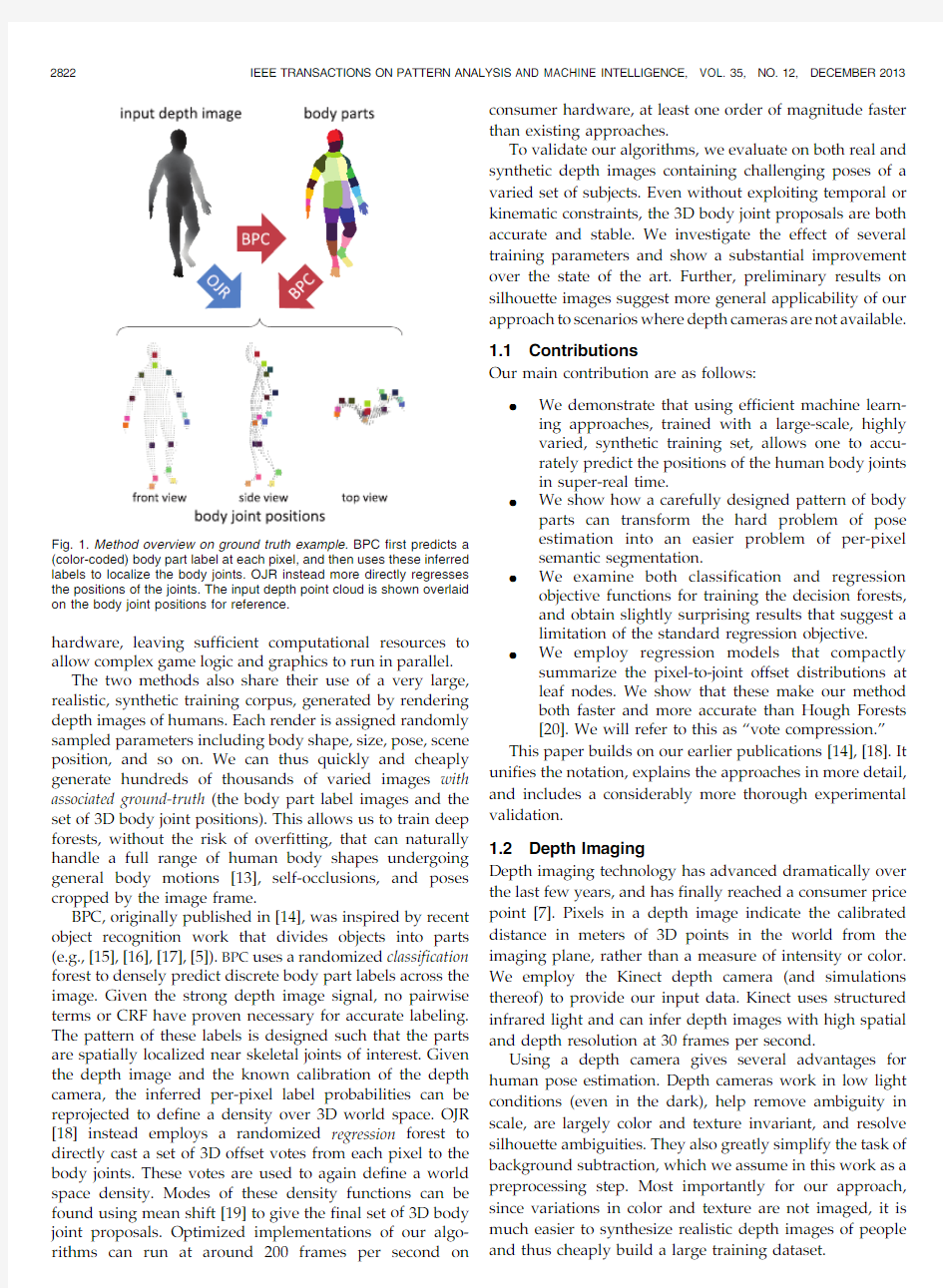
Toward these goals,this paper presents two related approaches for estimating human pose,illustrated in Fig.1. We will refer to these as body part classification(BPC)and offset joint regression(OJR).The BPC and OJR algorithms output high-quality shortlists of confidence-weighted proposals for the3D locations of the skeletal body joints. These proposals are computed at each frame and for each joint independently.
Traditional human body tracking algorithms[8],[9],[1], [10],[6],[11]infer a complete skeleton by exploiting kinematic constraints and can achieve high frame-rates by using temporal coherence from frame-to-frame.However, without regular reinitialization,tracking algorithms are prone to catastrophic loss of track.Our original design was for our3D body joint proposals to provide initialization and per-frame recovery to complement any appropriate track-ing algorithm.However,our per-frame,per-joint proposals have proven remarkably accurate,and might well be usable without tracking a full body model.
Both BPC and OJR use an efficient decision forest that is applied at each pixel in the image.Evaluating the contribu-tion of each pixel to each joint separately avoids any combinatorial search over body joints.The forest uses simple yet discriminative depth comparison image features that give3D translation invariance while maintaining high-computational efficiency.In an optimized implementation, these features and the classifier itself can be evaluated in parallel across each pixel on a GPU[12]or multicore CPU. Both algorithms can run at super-real-time rates on consumer
.J.Shotton,A.Fitzgibbon,T.Sharp,M.Cook,P.Kohli,A.Criminisi,and
A.Blake are with Microsoft Research,7JJ Thomson Avenue,Cambridge
CB30FB,UK.E-mail:{jamiesho,awf,tsharp,a-macook,pkohli,antcrim,
ablake}@https://www.sodocs.net/doc/1d7096147.html,.
.R.Girshick is with EERES-COENG Engineering Research,University of
California,Berkeley,CA94720.E-mail:ross.girshick@https://www.sodocs.net/doc/1d7096147.html,.
.M.Finocchio and A.Kipman are with Microsoft Corporation,One
Microsoft Way,Redmond,WA98052.
E-mail:{markfi,akipman}@https://www.sodocs.net/doc/1d7096147.html,.
.R.Moore is with ST-Ericsson.E-mail:richard.moore@https://www.sodocs.net/doc/1d7096147.html,.
Manuscript received29Mar.2012;revised5Oct.2012;accepted16Oct.
2012;published online26Oct.2012.
Recommended for acceptance by P.Felzenszwalb,D.Forsyth,P.Fua,and
T.E.Boult.
For information on obtaining reprints of this article,please send e-mail to:
tpami@https://www.sodocs.net/doc/1d7096147.html,,and reference IEEECS Log Number
TPAMSI-2012-03-0229.
Digital Object Identifier no.10.1109/TPAMI.2012.241.
0162-8828/13/$31.00?2013IEEE Published by the IEEE Computer Society
hardware,leaving sufficient computational resources to allow complex game logic and graphics to run in parallel.
The two methods also share their use of a very large, realistic,synthetic training corpus,generated by rendering depth images of humans.Each render is assigned randomly sampled parameters including body shape,size,pose,scene position,and so on.We can thus quickly and cheaply generate hundreds of thousands of varied images with associated ground-truth(the body part label images and the set of3D body joint positions).This allows us to train deep forests,without the risk of overfitting,that can naturally handle a full range of human body shapes undergoing general body motions[13],self-occlusions,and poses cropped by the image frame.
BPC,originally published in[14],was inspired by recent object recognition work that divides objects into parts (e.g.,[15],[16],[17],[5]).BPC uses a randomized classification forest to densely predict discrete body part labels across the image.Given the strong depth image signal,no pairwise terms or CRF have proven necessary for accurate labeling. The pattern of these labels is designed such that the parts are spatially localized near skeletal joints of interest.Given the depth image and the known calibration of the depth camera,the inferred per-pixel label probabilities can be reprojected to define a density over3D world space.OJR [18]instead employs a randomized regression forest to directly cast a set of3D offset votes from each pixel to the body joints.These votes are used to again define a world space density.Modes of these density functions can be found using mean shift[19]to give the final set of3D body joint proposals.Optimized implementations of our algo-rithms can run at around200frames per second on consumer hardware,at least one order of magnitude faster than existing approaches.
To validate our algorithms,we evaluate on both real and synthetic depth images containing challenging poses of a varied set of subjects.Even without exploiting temporal or kinematic constraints,the3D body joint proposals are both accurate and stable.We investigate the effect of several training parameters and show a substantial improvement over the state of the art.Further,preliminary results on silhouette images suggest more general applicability of our approach to scenarios where depth cameras are not available.
1.1Contributions
Our main contribution are as follows:
.We demonstrate that using efficient machine learn-ing approaches,trained with a large-scale,highly
varied,synthetic training set,allows one to accu-
rately predict the positions of the human body joints
in super-real time.
.We show how a carefully designed pattern of body parts can transform the hard problem of pose
estimation into an easier problem of per-pixel
semantic segmentation.
.We examine both classification and regression objective functions for training the decision forests,
and obtain slightly surprising results that suggest a
limitation of the standard regression objective.
.We employ regression models that compactly summarize the pixel-to-joint offset distributions at
leaf nodes.We show that these make our method
both faster and more accurate than Hough Forests
[20].We will refer to this as“vote compression.”
This paper builds on our earlier publications[14],[18].It unifies the notation,explains the approaches in more detail, and includes a considerably more thorough experimental validation.
1.2Depth Imaging
Depth imaging technology has advanced dramatically over the last few years,and has finally reached a consumer price point[7].Pixels in a depth image indicate the calibrated distance in meters of3D points in the world from the imaging plane,rather than a measure of intensity or color. We employ the Kinect depth camera(and simulations thereof)to provide our input data.Kinect uses structured infrared light and can infer depth images with high spatial and depth resolution at30frames per second.
Using a depth camera gives several advantages for human pose estimation.Depth cameras work in low light conditions(even in the dark),help remove ambiguity in scale,are largely color and texture invariant,and resolve silhouette ambiguities.They also greatly simplify the task of background subtraction,which we assume in this work as a preprocessing step.Most importantly for our approach, since variations in color and texture are not imaged,it is much easier to synthesize realistic depth images of people and thus cheaply build a large training dataset.
Fig.1.Method overview on ground truth example.BPC first predicts a (color-coded)body part label at each pixel,and then uses these inferred labels to localize the body joints.OJR instead more directly regresses the positions of the joints.The input depth point cloud is shown overlaid on the body joint positions for reference.
1.3Related Work
Human pose estimation has generated a vast literature, surveyed in[21],[22].We briefly review some of the recent advances.
1.3.1Recognition in Parts
Several methods have investigated using some notion of distinguished body parts.One popular technique, pictorial structures[23],was applied by Felzenszwalb and Huttenlocher[24]to efficiently estimate human pose by representing the body by a collection of parts arranged in a deformable configuration.Springs are used between parts to model the deformations.Ioffe and Forsyth[25] group parallel edges as candidate body segments and prune combinations of segments using a projected classi-fier.Ramanan and Forsyth[26]find candidate body segments as pairs of parallel lines and cluster their appearances across frames,connecting up a skeleton based on kinematic constraints.Sigal et al.[9]used eigen-appearance template detectors for head,upper arms,and lower legs proposals.Nonparametric belief propagation was then used to infer whole body pose.Tu’s“auto-context”was used in[27]to obtain a coarse body part labeling.These labels were not defined to localize joints, and classifying each frame took about40seconds.“Poselets”that form tight clusters in both3D pose and 2D image appearance,detectable using SVMs,were presented by Bourdev and Malik[17].Wang and Popovi c
[10]proposed a related approach to track a hand clothed in
a colored glove;our BPC system could be viewed as automatically inferring the colors of a virtual colored suit from a depth image.As detailed below,our BPC algorithm [14]extends the above techniques by using parts that densely cover the body and directly localize body joints.
1.3.2Pose from Depth
Recent work has exploited improvements in depth imaging and3D input data.Anguelov et al.[28]segment puppets in3D range scan data into head,limbs,torso,and background using spin images and an MRF.Grest et al.
[1]use Iterated Closest Point(ICP)to track a skeleton of a known size and starting position from depth images.In[3], Zhu and Fujimura build heuristic detectors for coarse upper body parts(head,torso,arms)using a linear programming relaxation,but require a T-pose initialization to calibrate the model shape.Siddiqui and Medioni[4] hand-craft head,hand,and forearm detectors,and show that data-driven MCMC model fitting outperforms the ICP algorithm.Kalogerakis et al.[29]classify and segment vertices in a full closed3D mesh into different parts,but do not deal with occlusions and are sensitive to mesh topology.Plagemann et al.[5]build a3D mesh to find geodesic extrema interest points which are classified into three parts:head,hand,and foot.This method provides both a location and orientation estimate of these parts,but does not distinguish left from right,and the use of interest points limits the choice of parts.
1.3.3Regression
Regression has been a staple of monocular2D human pose estimation[30],[31],[32],[13].Several methods have explored matching exemplars or regressing from a small set of nearest neighbors.The shape context descriptor was used by Mori and Malik[33]to retrieve exemplars. Shakhnarovich et al.[34]estimate upper body pose, interpolating k-NN poses efficiently indexed by parameter sensitive hashing.Agarwal and Triggs[30]learn a regression from kernelized image silhouette features to pose.Navaratnam et al.[32]use the marginal statistics of unlabeled data to improve pose estimation.Local mixtures of Gaussian Processes were used by Urtasun and Darrell [13]to regress human pose.Our OJR approach combines some ideas from these approaches with the tools of high-speed object recognition based on decision trees.
1.3.4Other Approaches
An alternative random forest-based method for pose estimation was proposed by[35].Their approach quantizes the space of rotations and gait cycle,though it does not directly produce a detailed pose estimate.
A related technique to our OJR algorithm is used in object localization.For example,in the implicit shape model(ISM)[36],visual words are used to learn voting offsets to predict2D object centers.ISM has been extended in two pertinent ways.Mu¨ller and Arens[37]apply ISM to body tracking by learning separate offsets for each body joint.Gall and Lempitsky[20]replace the visual word codebook of ISM by learning a random forest in which each tree assigns every image pixel to a decision-tree leaf node at which is stored a potentially large collection of votes.This removes the dependence of ISM on repeatable feature extraction and quantization,as well as the some-what arbitrary intermediate codebook representation. Associating a collection of“vote offsets”with each leaf node/visual word,these methods then accumulate votes to determine the object centers/joint positions.Our OJR method builds on these techniques by compactly summar-izing the offset distributions at the leaf nodes,learning the model hyper-parameters,and using a continuous test-time voting space.
1.4Outline
The remainder of the paper is organized as follows:Section2 explains how we generate the large,varied training set that is the key to our approach.Following that,Section3 describes the two algorithms in a unified framework.Our experimental evaluation is detailed in Section4,and we conclude in Section5.
2D ATA
Many techniques for pose estimation require training images with high-quality ground truth labels,such as joint positions.For real images,these labels can be very expensive to obtain.Much research has thus focused on techniques to overcome lack of training data by using computer graphics[34],[38],[39],but there are two potential problems:
1.Rendering realistic intensity images is hampered by
the huge color and texture variability induced by
clothing,hair,and skin,often meaning that the data
are reduced to2D silhouettes[30].While depth
cameras significantly reduce this difficulty,consid-
erable variation in body and clothing shape remains.
SHOTTON ET AL.:EFFICIENT HUMAN POSE ESTIMATION FROM SINGLE DEPTH IMAGES2823
2.Synthetic body pose renderers use,out of necessity,
real motion capture(mocap)data.Although techni-
ques exist to simulate human motion(e.g.,[40]),they
do not yet produce a full range of volitional motions
of a human subject.
In this section,we describe how we overcome these problems.We take real mocap data,retarget this to a variety of base character models,and then synthesize a large, varied dataset.We believe the resulting dataset to con-siderably advance the state of the art in both scale and variety,and will demonstrate the importance of such a large dataset in our evaluation.
2.1Motion Capture Data
As noted above,simulating human pose data is an unsolved problem.Instead,we obtain ground truth pose data using marker-based motion capture of real human actors.The human body is capable of an enormous range of poses. Modeled jointly,the number of possible poses is exponential in the number of articulated joints.We cannot thus record all possible poses.However,there is hope.As will be seen in Section3,our algorithms,based on sliding window decision forests,were designed to only look at a local neighborhood of a pixel.By looking at local windows,we factor whole body poses into combinations of local poses,and can thus expect the forests to generalize somewhat to unseen poses.In practice,even a limited corpus of mocap data where,for example,each limb separately moves through a wide range of poses has proven sufficient.Further,we need not record mocap with variation in rotation about the vertical axis, mirroring left-right,scene position,body shape,and size,or camera pose,all of which can be simulated.Given our core entertainment scenario,we recorded500K frames in a few hundred sequences of driving,dancing,kicking,running, navigating menus,and so on.
To create training data we render single,static depth images because,as motivated above,our algorithms deliberately eschew temporal information.Often,changes in pose from one mocap frame to the next are so small as to be insignificant.We can thus discard many similar, redundant poses using“furthest neighbor”clustering[41]. We represent a pose P as a collection P?ep1;...;p JTof J joints where each p j is a3D position vector.Starting with set P all of all the recorded mocap poses,we choose an initial pose at random and then greedily grow a set P as
P:?P[è
argmax
P2P all nP
min
P02P
d poseeP;P0T
é
;e1T
where as the distance between poses we use the maximum euclidean distance over body joints j:
d poseeP;P0T?max
j2f1;...;J g
p jàp0j
2
:e2T
We stop growing set P when there exists no unchosen pose P which has d poseeP;P0T>D pose for any chosen pose P0.We set D pose?5cm.This results in a final subset P&P all containing approximately100K most dissimilar poses.
We found it necessary to iterate the process of motion capture,rendering synthetic training data,training the classifier,and testing joint prediction accuracy.This allowed us to refine the mocap database with regions of pose space that had been previously missed out.Our early experiments employed the CMU mocap database[42] which gave acceptable results though it covers far less of pose space.
2.2Rendering Synthetic Data
We build a randomized rendering pipeline.This can be viewed as a generative model from which we can sample fully labeled training images of people.Our goals in building this pipeline were twofold:Realism—we want the samples to closely resemble real images so that the learned model can work well on live camera input;and Variety—the dataset must contain good coverage of the appearance variations we hope to recognize at test time. Fig.3illustrates the huge space of possible appearance variations we need to deal with for just one body part, even when restricted to a pixel’s local neighborhood as discussed above.
Our features achieve3D translation invariance by design(see below).However,other invariances such as pose and shape cannot be designed so easily or efficiently, and must instead be encoded implicitly through the training data.The rendering pipeline thus randomly samples a set of parameters,using the best approxima-tions we could reasonably achieve to the variations we expected to observe in the real world.While we cannot hope to sample all possible combinations of variations,if samples contain somewhat independent variations(in particular,excluding artificial correlations such as thin people always wear a hat),we can expect the classifier to learn a large degree of invariance.Let us run through the variations we simulate:
Base character.We use3D models of15varied base characters,both male and female,from child to adult,short to tall,and thin to fat.Some examples are shown in Fig.4.A given render will pick uniformly at random from the characters.
Pose.Having discarded redundant poses from the mocap data,we retarget the remaining poses P2P to each base character using[43].A pose is selected uniformly at random and mirrored left-right with probability1
2
to prevent a left or right bias.
Rotation and translation.The character is rotated about the vertical axis and translated in the scene,uniformly at random.Translation ensures we obtain cropped training examples where the character is only partly in-frame.
Hair and clothing.We add mesh models of several hair styles and items of clothing chosen at random.A slight gender bias is used so that,for instance,long hair is chosen more often for the female models,and beards are only chosen for the male models.
Weight and height variation.The base characters already include a wide variety of weights and heights.To add further variety we add an extra variation in height (?10percent)and weight(?10percent).For rendering efficiency,we assume this variation does not affect the pose retargeting.
Camera position and orientation.The camera height,pitch, and roll are chosen uniformly at random within a range believed to be representative of an entertainment scenario in a home living room.
2824IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE,VOL.35,NO.12,DECEMBER2013
Camera noise .While depth camera technology has improved rapidly in the last few years,real depth cameras exhibit noise,largely due to non-IR-reflecting materials (e.g.,glass,hair),surfaces that are almost perpendicular to the sensor,and ambient illumination.To ensure high realism in our dataset,we thus add artificial noise to the clean computer graphics renders to simulate the depth imaging process:dropped-out pixels,depth shadows,spot noise,and disparity quantization.
We use standard linear skinning techniques from computer graphics to animate the chosen 3D mesh model given the chosen pose,and a custom pixel shader is used to render the depth images.Fig.2compares the varied output of the pipeline to hand-labeled real depth images.The synthetic data is used both as fully labeled training data,and,alongside real hand-labeled depth images,as test data in our evaluation.
In building this randomized rendering pipeline,we attempted to fit as much variety in as many ways as we could,given the time constraints we were under.Investigating the precise effects of the choice and amounts of variation would be fascinating,but lies beyond the scope of this work.
2.3Training Data Labeling
A major advantage of using synthetic training images is that the ground truth labels can be generated almost for free,allowing one to scale up supervised learning to very large scales.The complete rendering pipeline allows us to rapidly sample hundreds of thousands of unique images of people.The particular tasks we address in this work,BPC and OJR ,require different types of label,described next.
2.3.1BPC labels
Our first algorithm,BPC ,aims to predict a discrete body part label at each pixel.At training time,these labels are required for all pixels,and we thus represent the labels as a color-coded body part label image that accompanies each depth image (see Figs.1and Figs.2).
The use of an intermediate body part representation that can localize 3D body joints is a key contribution of this work.It transforms the pose estimation problem into one that can readily be solved by efficient classification algorithms.The particular pattern of body parts used was designed by hand to balance these desiderata:
.
the parts must densely cover the body,as a prediction is made for every pixel in the foreground,.the parts should not be so small and numerous as to
waste capacity of the classifier,and
.the parts must be small enough to well localize a
region of the body.
By centering and localizing some of the parts around body joints of interest,accurate body part predictions will necessarily spatially localize those body joints ,and,because we have calibrated depth images,this localization will implicitly be in 3D.
The parts definition can be specified in a texture map and retargeted to the various 3D base character meshes for rendering.For our experiments,we define 31body parts:LU/RU/LW/RW head,neck,L/R shoulder,LU/RU/LW/RW arm,L/R elbow,L/R wrist,L/R hand,LU/RU/LW/RW torso,LU/RU/LW/RW leg,L/R knee,L/R ankle,and L/R foot (L eft,R ight,U pper,lo W er).Distinct parts for left and right allow the classifier to learn to disambiguate the left and right sides of the body.The precise definition of these parts might be changed to suit a particular application.For example,in an upper body tracking scenario,all the lower body parts could be merged into a single part.2.3.2OJR Labels
Our second algorithm,OJR ,instead aims to estimate the 3D joint positions more directly.As such,the ground truth labels it requires are simply the ground truth 3D joint positions.These are trivially recorded during the standard mesh skinning process.In our experiments,we use 16body
SHOTTON
ET
AL.:
EFFICIENT HUMAN
POSE ESTIMATION
FROM
SINGLE DEPTH
IMAGES
2825
Fig.2.Synthetic versus real data .Pairs of depth images and corresponding color-coded ground truth body part label images.The 3D body joint positions are also known (but not shown).Note the wide variety in pose,shape,clothing,and crop.The synthetic images look remarkably
similar to
the
real images,primarily
lacking
just the high-frequency
texture.
Fig.3.A single body part varies widely in its context.Fig.4.Example base character models.
跑步的基本技巧和动作要领
跑步的基本技术动作要领 1、头和肩跑步动作要领——保持头与肩的稳定。头要正对前方,除非道路不平,不要前探,两眼注视前方。肩部适当放松,避免含胸。动力伸拉——耸肩。肩放松下垂,然后尽可能上耸,停留一下,还原后重复,臂与手跑步动作要领——摆臂应是以肩为轴的前后动作,左右动作幅度不超过身体正中线。手指、腕与臂应是放松的,肘关节角度约为90度。动力伸拉——抬肘摆臂。两臂一前一后成预备起跑姿势,后摆臂肘关节尽量抬高,然后放松前摆。随着动作加快时越抬越高。 2、躯干与髋跑步动作要领——从颈倒腹保持直立,而非前倾(除非加速或上坡)或后仰,这样有利于呼吸、保持平衡和步幅。躯干不要左右摇晃或上下起伏太大。腿前摆时积极送髋,跑步时要注意髋部的转动和放松。动力伸拉——弓步压腿。两腿前后开立,与肩同宽,身体中心缓慢下压至肌肉紧张,然后放松还原。躯干始终保持直立。 3、腰跑步动作要领——腰部保持自然直立,不宜过于挺直。肌肉稍微紧张,维持躯干姿势,同时注意缓冲脚着地的冲击。动力伸拉——体前屈伸。自然站立,两脚开立,与肩同宽。躯干缓慢前屈至两手下垂至脚尖,保持一会儿,然后复原。 4、大腿与膝跑步动作要领——大腿和膝用力前摆,而不是上抬。腿的任何侧向动作都是多余的,而且容易引起膝关节受伤,因此大腿的前摆要正。动力拉伸——前弓身.两脚站距同髋宽.双手放在头后.从髋关节屈体向前.保持腰背挺直,直到股二头肌感到紧张。 5、小腿与跟腱跑步动作要领——脚应落在身体前约一尺的位置,靠近正中线。小腿不宜跨得太远,避免跟腱因受力过大而劳损。同时要注意小腿肌肉和跟腱在着地时的缓冲,落地时小腿应积极向后扒地,使身体积极向前。另外,小腿前摆方向要正,脚应该尽量朝前,不要外翻或后翻,否则膝关节和踝关节容易受伤。可在沙滩上跑步时检查脚印以作参考。动力伸拉——撑壁提踵。面向墙壁约1米左右站立,两臂前伸与肩同宽,手撑壁。提踵,再放下,感觉小腿和跟腱紧张。 6、脚跟与脚趾跑步动作要领——如果步幅过大,小腿前伸过远,会以脚跟着地,产生制动刹车反作用力,对骨和关节损伤很大。正确的落地时用脚的中部
正确的跑步方法
正确的跑步方法 1、头和肩 跑步动作要领——保持头与肩的稳定。头要正对前方,除非道路不平,不要前探,两眼注视前方。肩部适当放松,避免含胸。 动力伸拉——耸肩。肩放松下垂,然后尽可能上耸,停留一下,还原后重复。 2、臂与手 跑步动作要领——摆臂应是以肩为轴的前后动作,左右动作幅度不超过身体正中线。手指、腕与臂应是放松的,肘关节角度约为90度。 动力伸拉——抬肘摆臂。两臂一前一后成预备起跑姿势,后摆臂肘关节尽量抬高,然后放松前摆。随着动作加快时越抬越高。 3、躯干与髋 跑步动作要领——从颈倒腹保持直立,而非前倾(除非加速或上坡)或后仰,这样有利于呼吸、保持平衡和步幅。躯干不要左右摇晃或上下起伏太大。腿前摆时积极送髋,跑步时要注意髋部的转动和放松。 动力伸拉——弓步压腿。两腿前后开立,与肩同宽,身体中心缓慢下压至肌肉紧张,然后放松还原。躯干始终保持直立。 4、腰 跑步动作要领——腰部保持自然直立,不宜过于挺直。肌肉稍微紧张,维持躯干姿势,同时注意缓冲脚着地的冲击。 动力伸拉——体前屈伸。自然站立,两脚开立,与肩同宽。躯干缓慢前屈至两手下垂至脚尖,保持一会儿,然后复原。 5、大腿与膝 跑步动作要领——大腿和膝用力前摆,而不是上抬。腿的任何侧向动作都是多余的,而且容易引起膝关节受伤,因此大腿的前摆要正。 动力拉伸——前弓身.两脚站距同髋宽.双手放在头后.从髋关节屈体向前.保持腰背挺直,直到股二头肌感到紧张。
6、小腿与跟腱 跑步动作要领——脚应落在身体前约一尺的位置,靠近正中线。小腿不宜跨得太远,避免跟腱因受力过大而劳损。同时要注意小腿肌肉和跟腱在着地时的缓冲,落地时小腿应积极向后扒地,使身体积极向前。另外,小腿前摆方向要正,脚应该尽量朝前,不要外翻或后翻,否则膝关节和踝关节容易受伤。可在沙滩上跑步时检查脚印以作参考。 动力伸拉——撑壁提踵。面向墙壁约1米左右站立,两臂前伸与肩同宽,手撑壁。提踵,再放下,感觉小腿和跟腱紧张。 7、脚跟与脚趾 跑步动作要领——如果步幅过大,小腿前伸过远,会以脚跟着地,产生制动刹车反作用力,对骨和关节损伤很大。正确的落地时用脚的中部着地,并让冲击力迅速分散到全脚掌。 动力伸拉——坐式伸踝.跪在地上,臀部靠近脚跟,上体保持直立.慢慢向下给踝关节压力直到趾伸肌与脚前掌感到足够拉力.然后抬臀后重复.动作要有节奏,缓慢。 注意事项 1、跑步姿势要合理。上身应挺直并略前倾,双肩放松,双 肘自然弯曲,双臂有力的在身体两侧前后摆动。跑步过程中,双足有弹性的全足着地的跑动,步幅无须大,但步频与步幅要基本保持均匀。注意身体重心稳定,不要有大幅度起伏。 2、跑步中的呼吸问题很重要。呼吸要有一定节律,用鼻、 嘴同时呼吸时,嘴不必张得太大,可将舌卷起,延长空气在口腔里的时间,减少冷空气对呼吸道的刺激。每一次呼吸要注意尽可能将气体从肺中呼尽,以增大有效的换气量。 3、运动鞋要合适,鞋中要清洁,不要有沙粒。运动服装尽 量宽松些,但要注意保暖,尤其是冬季进行长跑,保暖问题很重要,可以戴帽子和手套。 4、锻炼时间可以是清晨或其他时间,但一般晨起时间较紧 张,冬季更是如此。有人认为在下午4~5点钟活动较好。其依据是,此时气温较高,不易着凉,时间充裕,光线较好,不易出意外。这要根据个人的情况而定。
【跑步的正确姿势有什么讲究】 正确的跑步姿势分解图
【跑步的正确姿势有什么讲究】正确的跑 步姿势分解图 跑步的正确姿势有什么讲究篇一当我们提到运动,健身,不少人会马上联想到跑步。我想这是因为相较其他运动,跑步算是好入门,且能看见成效。正确的姿势让提升你的跑步效率,同时减少受伤的风险,而错误的姿势只会让你跑的很累,时间久了还容易累计慢性运动伤害。 一、跑步前,做好热身运动跑步前记得一定要热身。一些全身和脚部的缓和性热身运动必不可少,如腿部拉伸运动、揉搓膝盖,让关节、肌肉、韧带等得到预热,以免突然运动因关节僵硬而受伤。 二、跑步时,身体各部位协调1.头部请抬头收下巴跑步时视线朝前方、往下约30度左右,或看向前方约5-10米处,保持抬头挺胸、收下巴的姿势,。因为抬头直视前方时,下巴会自然抬起,呼吸反而会变得不容易,反之,视线若往下移一点,下巴自然会收起来,呼吸也会比较轻松。此外,也不要自顾自地低头猛跑,这样身体会向前倾、重心往前,容易造成颈部和腰部的负担。 2.肩部不要用肩膀摆动双臂,更不要耸肩,如果肩膀很容易紧绷,可在摆动双臂时让手肘靠近肋骨,或随时放下双手,让双手在两侧放松悬晃几秒。 3.手臂手肘弯曲如钟摆摆动放松肩膀,肘关节大约呈九十度角,以肩膀为轴心放松地摆动。手臂摆动的左右幅度不应过大,以手肘为出发点,将一只手臂往后摆,另一只手臂自然往前,就像钟摆一样。摆动的幅度以肋骨或腰际做为中心点,手指向后到肋骨为止,手肘向前也只到肋骨为止。可想像用手肘击打后方的人,而不是出拳打前面的人。此外,手应尽量放松,自然握拳,好像手心里握着一个鸡
蛋,不要把它捏碎。 4.躯干背拉直缩小腹挺胸、缩小腹,背部拉直,彷佛是一条拉得笔直的线,身体微微向前倾。切记不要弯腰或拱背,以免造成背部的负担而疼痛。 三、跑步后,做好身体调节动作不要马上坐下或躺下休息,可以在温暖的地方做些舒缓的慢走动作,如果疲累到必须躺下,就将双脚举高至头部约15至30厘米的水平。 篇二头和肩:跑步动作要领——保持头与肩的稳定。头要正对前方,除非道路不平,不要前探,两眼注视前方。肩部适当放松,避免含胸。 动力伸拉——耸肩。 1、头和肩跑步动作要领——保持头与肩的稳定。头要正对前方,除非道路不平,不要前探,两眼注视前方。肩部适当放松,避免含胸。 动力伸拉——耸肩。肩放松下垂,然后尽可能上耸,停留一下,还原后重复。 2、臂与手跑步动作要领——摆臂应是以肩为轴的前后动作,左右动作幅度不超过身体正中线。手指、腕与臂应是放松的,肘关节角度约为90度。 动力伸拉——抬肘摆臂。两臂一前一后成预备起跑姿势,后摆臂肘关节尽量抬高,然后放松前摆。随着动作加快时越抬越高。 3、躯干与髋跑步动作要领——从颈倒腹保持直立,而非前倾(除非加速或上坡)或后仰,这样有利于呼吸、保持平衡和步幅。躯干不要左右摇晃或上下起伏太大。腿前摆时积极送髋,跑步时要注意髋部的转动和放松。
标准跑步的姿势是怎样的
标准跑步的姿势是怎样的 标准跑步的姿势是怎样的 要素一:摆臂 摆臂是在跑不过程当中,保持身体的平衡性和协调性,使身体更自然的摆动,更符合人体运动的韵律。摆臂时,只要记住前不漏手,后不漏肘,自然的随着脚步而摆动。 要素二:落地缓冲 如果你有仔细观察过他人跑步,你会发现,很多人都是全脚掌着地,落地时的声音也比较大。正确的动作是在跑步时,腾空脚落地时要脚跟先着地,然后再过渡到全脚掌。这是对于脚踝、膝盖的一种保护,防止骨膜炎的发生。 要素三:呼吸 跑步时的呼吸是深远而悠长的,一般采用鼻吸嘴呼,体力下降较为严重是可以采用嘴吸嘴呼方式。 要素四:抬头挺胸 跑步是保持抬头挺胸有助于改善人体的呼吸循环系统以及建立正常的记住状态。因为你在跑步过程中,人体在不断的消耗能量,易出现疲劳状况,这时如果你能用你的意志挺起你的脊梁,那么你要改善驼背状况其实就很简单了。 要素五:心率 慢跑作为一种养生的有氧运动,就要和快速跑区分开来。一般来说,最适合身体锻炼的心率律动次数是:(220-年龄)60%左右。大
家跑步的时候可以适当的测量以下。 跑步有哪些好处 1、防止你的骨骼,肌肉退化 我们的骨骼是和你的身体需求相互协调的。长期坐在显示器前的我们让我们的骨骼越来越脆弱。而长期的,经常的运动会使你的骨骼保持健康。更进一步说就是防止我们身体内部老化的更快。经常的高强度锻炼,例如跑步,被证明可以促进人体荷尔蒙的生长,荷尔蒙就是那些名人为了看起来更年轻而持续注射的药剂。 2、告别臃肿身材 许多人开始跑步就是因为减肥,跑步确实减肥的最好运动方式,跑步每分钟比起其他运动燃烧更多的卡路里。 3、维持并提高总体的身体水平 跑步是人们可以采取的最好的锻炼身体的运动。它可以提高胆固醇,降低血液凝块的危险,锻炼你的50%的经常处于闲置状态的肺。跑步还可以通过增加你的淋巴细胞来增强你的免疫力。 4、抵抗疾病 跑步还能够大大的降低患有乳腺癌和中风的机率。医生经常会建议那些处在早期的骨质疏松,糖尿病,高血压病人平时多跑跑步。 5、让你更加自信 慢跑像其他一些单人运动一样,它可以增强你的自信心。跑步让你完成一次又一次的尝试,让你变得更强大,更加肯定自己。他让你真实的越过某个山峰,穿过某个障碍、在意识到你的身体已经更加强
【奔跑吧】跑步技术之跑步姿势!
“喜欢跑步, 喜欢身边习习而过的凉风, 喜欢倾听耳边的啾啾虫鸣, 喜欢感受思想的天马行空, 喜欢努力奔跑时的大汗淋漓, 喜欢肆意自由而急促的呼吸, 喜欢冲刺时的快感以及喜悦。” 跑步是一门艺术,也是一门技术,良好的跑姿可以让人更精神抖擞,也能让人看着更帅气,还能有效避免运动损伤,更能提升跑步效率,小编跑龄4年半,进行过较系统的跑步教练培训,也完成过100公里以上的超级越野跑,今天简单为大家分享一些自己对于跑步姿势的理解,希望能对大家有用,也请各位跑步大咖不吝指教。 注意:本文所讲跑步姿势仅指符合国际主流的、且针对没有专业基础的普通跑者的长跑(非专业选手)姿势。根据自己身体结构自然而形成跑步技术的专业运动员不在本文讨论范围之内。 一、良好跑姿的重要性 1,预防运动损伤的产生 良好的跑姿能让身体成为一个天然的避震系统,藉由流畅的动作与适当的体干位置来分散冲击,避免身体受伤。 我们在奔跑的过程中,每次与地面的接触,身体都将承受很大的压力,甚至达到自身体重的3-5倍。考虑到奔跑迈步的重复性,错误的动作模式会对肌肉、骨骼、肌腱和韧带造成巨大的压力,长时间使用不正确的姿势进行跑步,则会大大增加发生运动损失的几率。如过大的步幅会增加运动损伤的几率①。
当不良的跑步技术加上身体结构异常(尤其是脚、胫骨、大腿骨和骨盆错位)时,受伤的风险更会大大提高。因为当腿骨在垂直方向上不是直线的时候,骨骼两侧的肌肉受力不均匀,就会导致关节或结缔组织受伤。如脚内翻或外翻也会增加发生运动损伤的几率②。 2,可有效提升跑步效率 良好的跑姿,可以让身体的每一块肌肉都充分发挥,帮助你跑得更快;也能让你每一步都能更加省力,帮助你跑得更远。 一直以来,肯尼亚和埃塞俄比亚运动员在中长距离路跑赛事中处于垄断地位,“中国极限马拉松第一人”陈盆滨认为这和他们的跑姿息息相关,“他们的跑姿非常漂亮,跑起来很轻盈,因为他们基本上肌肉发力很少,发力的地方以胯和脚踝为主,脚底下是非常干净的。” 3,还可帮助你撩妹撩汉 良好的跑姿在让人更加阳光、精神的同时,还可以改善体态,让身体更和谐,甚至提升个人精神层次、生活愿景。 不管是比赛还是约跑时,即使我们不比别人快,但只要跑姿良好,拍照比较帅气,就赢在了起跑线,给人一种赏心悦目的感觉,甚至有助于遇见美好,邂逅爱情。 (Ryan Hall,被誉为“标准跑姿模特”) 二、良好的跑步姿势 1,没有标准的跑姿,只有合理的要求
跑步的正确姿势
1、头和肩 跑步动作要领——保持头与肩的稳定。头要正对前方,除非道路不平,不要前探,两眼注视前方。肩部适当放松,避免含胸。 动力伸拉——耸肩。肩放松下垂,然后尽可能上耸,停留一下,还原后重复。 2、臂与手 跑步动作要领——摆臂应是以肩为轴的前后动作,左右动作幅度不超过身体正中线。手指、腕与臂应是放松的,肘关节角度约为90度。 动力伸拉——抬肘摆臂。两臂一前一后成预备起跑姿势,后摆臂肘关节尽量抬高,然后放松前摆。随着动作加快时越抬越高。 3、躯干与髋 跑步动作要领——从颈倒腹保持直立,而非前倾(除非加速或上坡)或后仰,这样有利于呼吸、保持平衡和步幅。躯干不要左右摇晃或上下起伏太大。腿前摆时积极送髋,跑步时要注意髋部的转动和放松。 动力伸拉——弓步压腿。两腿前后开立,与肩同宽,身体中心缓慢下压至肌肉紧张,然后放松还原。躯干始终保持直立。 4、腰 跑步动作要领——腰部保持自然直立,不宜过于挺直。肌肉稍微紧张,维持躯干姿势,同时注意缓冲脚着地的冲击。 动力伸拉——体前屈伸。自然站立,两脚开立,与肩同宽。躯干缓慢前屈至两手下垂至脚尖,保持一会儿,然后复原。 5、大腿与膝 跑步动作要领——大腿和膝用力前摆,而不是上抬。腿的任何侧向动作都是多余的,而且容易引起膝关节受伤,因此大腿的前摆要正。 动力拉伸——前弓身.两脚站距同髋宽.双手放在头后.从髋关节屈体向前.保持腰背挺直,直到股二头肌感到紧张。 6、小腿与跟腱
跑步动作要领——脚应落在身体前约一尺的位置,靠近正中线。小腿不宜跨得太远,避免跟腱因受力过大而劳损。同时要注意小腿肌肉和跟腱在着地时的缓冲,落地时小腿应积极向后扒地,使身体积极向前。另外,小腿前摆方向要正,脚应该尽量朝前,不要外翻或后翻,否则膝关节和踝关节容易受伤。可在沙滩上跑步时检查脚印以作参考。 动力伸拉——撑壁提踵。面向墙壁约1米左右站立,两臂前伸与肩同宽,手撑壁。提踵,再放下,感觉小腿和跟腱紧张。 7、脚跟与脚趾 跑步动作要领——如果步幅过大,小腿前伸过远,会以脚跟着地,产生制动刹车反作用力,对骨和关节损伤很大。正确的落地时用脚的中部着地,并让冲击力迅速分散到全脚掌。 动力伸拉——坐式伸踝.跪在地上,臀部靠近脚跟,上体保持直立.慢慢向下给踝关节压力直到趾伸肌与脚前掌感到足够拉力.然后抬臀后重复.动作要有节奏,缓慢。
正确的跑步姿势
跑步,是我们每天都会做的事情,不管是刻意的为了瘦身跑还是不经意被狗追,因为跑步的门槛很低,穿着鞋就可以进行,然而专业的姿势水平还是要有,不然一直跑错姿势,长年累月下来可是会造成身体伤害的哦。 关于慢跑的呼吸频率,可能无数个教练有无数种说法,包括什么连续吸气两次再吐气两次等等……其实根本不重要。根据日本学者的统计,绝大多数的顶尖马拉松选手,都没有在care呼吸频率这种事,一切顺其自然就好了。反正我们只是慢跑,又不是要去比赛,维持自然呼吸就可以。 相信大家都有跑步跑到口干舌燥喉咙痛痛的经验吧?尽量用鼻子吸气、嘴巴吐气,轻松自然就好。如果空气不好的话,建议大家还是转战室内跑步机,当然买一个运动用口罩也是可以的。 真的不必刻意夹住胸(请买个运动bra好吗),也不必刻意维持角度,更不用刻意大幅度摆动双臂,减掉蝴蝶袖请从别的运动入手~双手的位置自然就好,跑步最重要的就是心情要好。 很多人都没有注意到,其实自己的跑步姿势一直错了,而且就错在脚步上。首先,两只脚应该各自踩在两条看不见的平行线上,而不是落在同一条直线。简单说,两脚之间要有一点点距离,千万不能向走猫步一样跑直线,对骨盆有伤害哦。
大家都知道,跑步会对膝盖造成负担,这也是很多懒癌没药救的女生拒绝跑步的理由之一(以及跑了腿会变粗、腰会变粗、我是公主我不跑步等翻白眼理由)。要把膝盖负担降到最低,就要用前脚掌着地——脚掌的前1/3,讲白了就是稍微踮起脚来跑。这样一来,我们的足弓就会缓冲掉大部分的冲击力,膝盖的负担自然也会大幅减少。 许多人跑步会有驼背的习惯,不知不觉背部就弯下去了,先别说健康问题,这样有多难看你知道吗!慢跑的时候要抬头挺胸,下巴稍微太高,脊椎也就会同时伸直、不会驼背。这样会让慢跑更有效率,同时抬头挺胸的姿势也是美美美的哟。 跑步过程中是可以喝水的,但是一次两小口就好。最好的情况是跑步前一个小时,喝大概300ml的水。喝水的时间和量,还要根据天气、场地以及个人身体状况而定,没有特别严格的标准,所以跑到一半口渴了,也不要忍住不喝哟。 天气不好、又不想去健身房怎么办 很简单,在室内原地踏步也可以,同样用前脚掌着地、膝盖要抬到90度,不管是早上刷牙还是午休刚睡醒,都可以这样做。 有些人认为跑步时用前掌着地,也有人认为应该足跟着地。我们建议先以用中间部分接触地面。研究表明一名好的长距离跑者通常是以足中着地的。慢跑者以足中和脚跟着地,快
正确慢跑姿势方法
正确慢跑姿势方法 生活当中是不是还有很多人在抱怨,为什么要待在办公室里面没有时间去锻炼自己的身体,久而久之身体方面小腹肥胖,身体臃肿,谁不想拥有一个s型的曲线身材呢,那么这成了大家非常想快速减肥问题,其实想要调理自己的身体,首先我们就要注意,平时如何来锻炼身体正确慢跑姿势来为大家介绍一下,希望大家能够在运动的过程当中,体会到调理身体的乐趣。 一、慢跑前要做好准备 做有氧运动前充分地将身体的潜在热能调整到准备状态,有利于身体内机能的调整,激发身体中的“GHRELIN”激素,促进脑内学习区域的神经细胞,一定程度上可以提高记忆力。 二、时间和速度是快速健康减重的关键 慢跑时的时间和速度取决于跑步时步伐姿态,一般有氧练习的时间为20至30分钟,时间太长会造成肌肉疲劳不利于健康。 三、速度性练习需要掌握
慢跑时首先两腿交替抬高,活动髋关节,然后逐渐提高速度,膝盖尽可能触及上腹部为好,手臂前后摆动,跑步时前脚掌先着地,过渡到全脚掌着地。可以加快血液循环,提高肌肉的摄氧量,但速度不宜过快,将有氧心率控制在60%―80%;避免无效运动,脂肪在无氧状况下将会停止分解,在上述心率控制外,减脂不可保证。 四、充分燃烧脂肪的美丽塑形 慢跑后,舒展身体可以使身体中的多余脂肪充分地进行燃烧,让身体大多部位得到锻炼,塑造你的完美S曲线。 五、正确的姿势和放松的 心态是美丽的诀窍。两手置于头部上方,合拢做伸展姿态,拉伸躯干部。有效的塑形减脂:规律不间断的慢跑运动练习可以大量消耗身体中的多余脂肪,而跑后的辅助练习,如缓解身体的拉伸锻炼,是塑造身体美丽的S形曲线、增强肌力和耐力的最佳选择。 似乎还有很多人对于跑步的常识并不了解,大家仅仅只是以
正确的走路姿势
正确的走路姿势 文/高科(知乎) (像上图跑步姿势一样,走路其实要有下肢和足趾蹬地将自己向前推出的动作,并且在腰椎稳定的前提下,让肩和髋出现相对旋转。这两点是我认为走路相当关键的部分!) 我通过跑酷结识了很多“老”朋友,35到45岁的很多,最大的一个今年59岁了。第1次见他的时候他的耐力让我很吃惊,我教了他定点和猫挂2个动作,连续练了1个半小时没有1秒钟休息,要知道这两个动作都在不停地跳。他一直很高兴,说这些动作很好,可以让人专注,要教给孩子们。 后来这老叔和我聊天,知道他是医学世家,很多年前出过一次车祸,不过对他来说是一次重生。他说“以前有些瞎活着,不知道自己在做什么。受伤之后才知道原来什么都不简单,就是走路也是件很费神的事情。要知道怎么转头,怎么单脚站立,怎么迈步保持平衡,更难的是过马路还要一边注意汽车一边走路,有时候没走多远就一身汗,太累了。小时候都是看解剖书长大的,但是伤一次之后才真正认识自己的身体。“后来他跑马拉松去了,我忘了其中的原因。再后来他说不跑全程了,去当了”兔子“,兔子就是马拉松过程中陪跑的人,帮助别人坚持下去。 婴儿在学会站立之后需要开始学习行走,行走学习过程中需要双足来控制不稳定的平衡状态,并且接受向前迈出的每一步都会跌倒的可能性,直到某一天跌倒突然被终止,行走这项技能就此稳定,就像修行人悟道一样,持续和反复之后,突然一天奇迹充满了整个生命。 行走是实现个体自由的需要和保证,行走使得人类可以探索或征服各种环境,即使人类发明了飞机和汽车,行走依然是不可缺少的方式。可悲的是一旦学会行走,便很少有人专注于行走,甚至由于不正确的走路姿势,引起了身体众多问题产生。
跑步的基本技巧和动作要领
跑步的基本技巧和动作要领标准化文件发布号:(9312-EUATWW-MWUB-WUNN-INNUL-DDQTY-KII
跑步的基本技术动作要领 1、头和肩跑步动作要领——保持头与肩的稳定。头要正对前方,除非道路不平,不要前探,两眼注视前方。肩部适当放松,避免含胸。动力伸拉——耸肩。肩放松下垂,然后尽可能上耸,停留一下,还原后重复,臂与手跑步动作要领——摆臂应是以肩为轴的前后动作,左右动作幅度不超过身体正中线。手指、腕与臂应是放松的,肘关节角度约为90度。动力伸拉——抬肘摆臂。两臂一前一后成预备起跑姿势,后摆臂肘关节尽量抬高,然后放松前摆。随着动作加快时越抬越高。 2、躯干与髋跑步动作要领——从颈倒腹保持直立,而非前倾(除非加速或上坡)或后仰,这样有利于呼吸、保持平衡和步幅。躯干不要左右摇晃或上下起伏太大。腿前摆时积极送髋,跑步时要注意髋部的转动和放松。动力伸拉——弓步压腿。两腿前后开立,与肩同宽,身体中心缓慢下压至肌肉紧张,然后放松还原。躯干始终保持直立。 3、腰跑步动作要领——腰部保持自然直立,不宜过于挺直。肌肉稍微紧张,维持躯干姿势,同时注意缓冲脚着地的冲击。动力伸拉——体前屈伸。自然站立,两脚开立,与肩同宽。躯干缓慢前屈至两手下垂至脚尖,保持一会儿,然后复原。 4、大腿与膝跑步动作要领——大腿和膝用力前摆,而不是上抬。腿的任何侧向动作都是多余的,而且容易引起膝关节受伤,因此大腿的前摆要正。动力拉伸——前弓身.两脚站距同髋宽.双手放在头后.从髋关节屈体向前.保持腰背挺直,直到股二头肌感到紧张。 5、小腿与跟腱跑步动作要领——脚应落在身体前约一尺的位置,靠近正中线。小腿不宜跨得太远,避免跟腱因受力过大而劳损。同时要注意小腿肌肉和跟腱在着地时的缓冲,落地时小腿应积极向后扒地,使身体积极向前。另外,小腿前摆方向要正,脚应该尽量朝前,不要外翻或后翻,否则膝关节和踝关节容易受伤。可在沙滩上跑步时检查脚印以作参考。动力伸拉——撑壁提踵。面向墙壁约1米左右站立,两臂前伸与肩同宽,手撑壁。提踵,再放下,感觉小腿和跟腱紧张。
正确的跑步姿势
正确的跑步姿势 几乎所有的胖子都认为,只要跑步,就能起到减肥效果。的确,如果你能坚持每天跑个1W米什么的(三五千米的都撤吧,这只是热身罢了),长期下来肯定是能起到减脂效果的。但问题在于,绝大部分想靠跑步减肥的人,他们根本不懂如何跑步,也不懂如何跑步才能瘦。所以总有人问,为什么自己跑了几个月,体重根本没掉。瞎跑跑能瘦才怪呢。 首先热身 热身使得身体各器官开始适应即将到来的运动,使得体温升高、心跳开始加速、腿部肌肉血管舒张以带来充足氧气。很多人活动时关节会有咔嚓的响声,这种多数是因为关节压力过大,周围的软组织太紧张,所以在某一个角度时,韧带无法控制关节活动,出现活动受限的情况。而跑步会动用到人体的大部分关节,适当进行关节活动避免受限。关节活动为下列几种:踝关节屈伸、绕环膝关节屈伸、绕环肩关节绕环髋关节扭转头部绕环就不上图了,上过学的应该都会....预热:快走慢跑 跑步正式开始前可先进行5分钟左右的快走或者慢跑,让身体温度提高,减少肌肉黏连,进入工作状态。那么多长时间合适咧,准备活动能使心率达到最大心率的70%左右(最大心率约等于220减去年龄)就成,一般10分钟,天气热时间可减半。 接下来跑步正确姿势 1.头肩稳定 跑步过程中,头部始终保持在肩部正上方,不要向前伸,也不要向后仰,肩膀始终平行于地面。 2.身体挺直 从脖颈到腹部的身体躯干应保持自然直立,不要弯腰驼背或刻意挺直,记住要始终保持自然的状态。手臂和肩膀略后张,这样能很好地保证呼吸顺畅,跑得时候才更有劲。 3.前后摆臂 跑步时身体的每个部位都应向前,手臂摆动时千万不可穿插到中间,最多不能超过身体正中线,上下摆动不超过胸部。手指、手腕、手臂保持放松,肘关节弯曲90度左右,靠近身体两侧。这样同样能让身体更好地保持平衡。 4.放松
正确跑步的动作
跑步的动作 跑步和走路其实都是自然而又复杂的动作,有很多书讲如何跑步,因此这篇我不想写跑步相关的肌肉或解剖,不写跑步如何是抬头挺胸,不写跑步如何跑的时间更长,大家要希望看得非常明白可以去看《跑步解剖书》(注:97页,腰大肌和股薄肌写反了)我这篇也不写完整的动作说明,免得有人看完跑步周期后说不会跑了,我写那些书上都不提的,重点说明几个动作技巧。很多人跑法不一样,下面是我一个人的意见,别人怎么跑我不知道。 下面是只针对慢跑的动作技术点说明: 1)外足弓先着地(包括足跟外侧一起落地)不是足跟先着地。有些时候也可以前脚掌先着地,但不会足跟先着地 2)摆动腿要向后勾腿(小腿肚子贴近大腿后侧,),这样是为了增加步幅, 3)蹬伸腿要送髋,让髋关节自然发生旋转,简单说腿蹬直屁股收紧 4)从来没有主动摆臂,看着是摆臂的动作其实只是躯干旋转带动肩关节也发生了旋转,手臂的位置可以屈肘在胸前也可以垂放身体两侧 5)跑步时收紧下腹和臀部,免得时间长了腰和膝盖疼。 6)胸式呼吸(但是跑动时主要靠腹斜肌参与呼吸) 7)身体重心稍微前倾,头颈和下巴收回,头始终看前方不能左右晃动 8)每步的腾空时间要短,脚掌是将自己向前贴着地面推进。 9)酸痛可以有,但你要接纳它,接纳它就是打开自己,打开自己酸痛就远离你了 10)跑步的强度控制在是有些累,但是可以坚持,不要一次把自己冲爆了。 跑步的肌肉链: 《逝去的武林》里边有一句话说:“我们练形意拳的人都是属蛇的,一根骨头。”这说的是身体是个整体,每次发力也是整体而出。其实本来任何动作都应该这样。如果跑步的时候你感觉不到脚和髋的关键,髋和肩的关系,肩和头的关系,可能你对跑步这个动作还不是真的明白,并非说不能跑,而是你从跑步中理解到的东西可能不多。跑步和走路相比,涉及的肌肉链是基本相同的,但是不同的地方在于跑步的周期中有腾空的阶段,正是这个腾空需要比走路更良好的筋膜弹性来避免肌肉的疲劳,如果你日常跑步过程中没有体会到整体发力,没有办法让整体发力,或者不懂筋膜,那有可能出现很多跑步相关的运动损伤或者局部过度粗大(注意:我又讲了如何局部瘦身哦.),因为不是整体参与就会出现某个关节负荷过大或某部分肌肉负荷过大的问题。 那如何提高整体感?如何练习筋膜?如何让跑步成为一个整体动作呢? 提高整体感的一些简单方式: 1)拉伸和基础核心训练 核心训练帮助稳定你的关节位置有利于肌肉发力和力量最大化 拉伸可以帮你找到那些不曾察觉的肌肉感觉,并将其带到实际练习当中去。 补充下,这里一定要记得我说的这句话:拉伸不能全身都拉伸一遍,核心也不能全身都练一遍,因为体态各有差异,肌肉有长有短,要平衡实际上是短的拉长,长的缩短。如果什么都不管直接拉伸和训练,一定会引发疼痛和损伤。 关于基本的拉伸和核心训练参考我下面这个视频,针对长期坐姿的人群, 针对骨盆后倾与重心前移的基本动作建议 核心部分还可以练我上篇走路姿势中提到的下腹部训练走 - 健康管理 - 知乎专栏(你要真想看自己去找,我不重复挂图了) 2)增加足趾训练 每次蹬地最后阶段把你自己推出去的不是你的脚,而是脚尖。
正确的跑步姿势
全民跑步 令狐采学 功能介绍减肥、健身、发现自我。与身体交流,与灵魂对话,跑步之旅,就是人生之旅。 全民跑步| 管住嘴、迈开腿,不信身材不健美! 导语:跑步虽然是最常见的锻炼方法,但跑步的要求却不简单。跑步的姿势不正确,不仅达不到理想的健身效果,还有可能给身体带来伤害。有人可能有疑问:“跑步不就是比走路快点,跑起来就可以吗?”如果这样想就大错特错了,以下是国外最专业最科学的跑步姿势,新手菜鸟学起来! 一、从头到脚,姿势全get! 1、头和肩 动作要领:保持头与肩的稳定。头要正对前方,除非道路不平,不要前探,两眼注视前方。肩部适当放松,避免含胸。 动力伸拉:耸肩。肩放松下垂,然后尽可能上耸,停留一下,还原后重复。 脊柱挺直,肩膀向后,身体稍微前倾。 头抬起,下巴与地面平行。 头不要往上看 也不要往下看 不要低头
不要摇头 面部肌肉和下巴要放松 肩不要晃动太大幅度,也不要太紧绷 2、手臂 动作要领:摆臂应是以肩为轴的前后动作,左右动作幅度不超过身体正中线。手指、腕与臂应是放松的,肘关节角度约为90度。 动力伸拉:抬肘摆臂。两臂一前一后成预备起跑姿势,后摆臂肘关节尽量抬高,然后放松前摆。随着动作加快时越抬越高。 手不要紧握 双手要放松 3、身体 动作要领:从颈到腹保持直立,而非前倾(除非加速或上坡)或后仰,这样有利于呼吸、保持平衡和步幅。躯干不要左右摇晃或上下起伏太大。腿前摆时积极送髋,跑步时要注意髋部的转动和放松。 动力伸拉:弓步压腿。两腿前后开立,与肩同宽,身体中心缓慢下压至肌肉紧张,然后放松还原。躯干始终保持直立。 身体微微前倾 这样就过分前倾了 也不要过于后倾了 不要晃动臀部
正确的慢跑姿势是怎样的
跑步的作用: 鉴于写跑步的人这么多,我就不重复了。跑步的作用取决于每个人对跑步的理解,可以预防慢性疾病,提高免疫力,提高生活质量,提高心肺耐力,增强体质,融入一个群体获得一些鼓励,成为一种生活方式为跑步而活,都是跑步的作用。关于跑步有什么用,在《跑步圣经》一书里写了很多,大家可以去看看。大家还可以看看《天生就会跑》更能体会一些接近动作本质的东西。(说真的,不是跑步可以这样,是生活中很多事情都可以这样,比如扫地,做饭,洗衣服,本质上都是一样的,看你怎么看待这些事情。) 跑步的动作 跑步和走路其实都是自然而又复杂的动作,有很多书讲如何跑步,因此这篇我不想写跑步相关的肌肉或解剖,不写跑步如何是抬头挺胸,不写跑步如何跑的时间更长,大家要希望看得非常明白可以去看《跑步解剖书》(注:97页,腰大肌和股薄肌写反了)我这篇也不写完整的动作说明,免得有人看完跑步周期后说不会跑了,我写那些书上都不提的,重点说明几个动作技巧。很多人跑法不一样,下面是我一个人的意见,别人怎么跑我不知道。 下面是只针对慢跑的动作技术点说明: 1)外足弓先着地(包括足跟外侧一起落地)不是足跟先着地。有些时候也可以前脚掌先着地,但不会足跟先着地 2)摆动腿要向后勾腿(小腿肚子贴近大腿后侧,),这样是为了增加步幅,
3)蹬伸腿要送髋,让髋关节自然发生旋转,简单说腿蹬直屁股收紧 4)从来没有主动摆臂,看着是摆臂的动作其实只是躯干旋转带动肩关节也发生了旋转,手臂的位置可以屈肘在胸前也可以垂放身体两侧 5)跑步时收紧下腹和臀部,免得时间长了腰和膝盖疼。 6)胸式呼吸(但是跑动时主要靠腹斜肌参与呼吸)
7)身体重心稍微前倾,头颈和下巴收回,头始终看前方不能左右晃动 8)每步的腾空时间要短,脚掌是将自己向前贴着地面推进。 9)酸痛可以有,但你要接纳它,接纳它就是打开自己,打开自己酸痛就远离你了 10)跑步的强度控制在是有些累,但是可以坚持,不要一次把自己冲爆了。 跑步的肌肉链: 《逝去的武林》里边有一句话说:“我们练形意拳的人都是属蛇的,一根骨头。”这说的是身体是个整体,每次发力也是整体而出。其实本来任何动作都应该这样。如果跑步的时候你感觉不到脚和髋的关键,髋和肩的关系,肩和头的关系,可能你对跑步这个动作还不是真的明白,并非说不能跑,而是你从跑步中理解到的东西可能不多。跑步和走路相比,涉及的肌肉链是基本相同的,但是不同的地方在于跑步的周期中有腾空的阶段,正是这个腾空需要比走路更良好的筋膜弹性来避免肌肉的疲劳,如果你日常跑步过程中没有体会到整体发力,没有办法让整体发力,或者不懂筋膜,那有可能出现很多跑步相关的运动损伤或者局部过度粗大(注意:我又讲了如何局部瘦身哦.),因为不是整体参与就会出现某个关节负荷过大或某部分肌肉负荷过大的问题。 那如何提高整体感?如何练习筋膜?如何让跑步成为一个整体动作呢? 提高整体感的一些简单方式: 1)拉伸和基础核心训练 核心训练帮助稳定你的关节位置有利于肌肉发力和力量最大化 拉伸可以帮你找到那些不曾察觉的肌肉感觉,并将其带到实际练习当中去。 补充下,这里一定要记得我说的这句话:拉伸不能全身都拉伸一遍,核心也不能全身都练一遍,因为体态各有差异,肌肉有长有短,要平衡实际上是短的拉长,长的缩短。如果什么都不管直接拉伸和训练,一定会引发疼痛和损伤。 2)增加足趾训练 每次蹬地最后阶段把你自己推出去的不是你的脚,而是脚尖。 请尝试在练习提踵时,深蹲时,跑步时脚趾头抓地,这个微小的变化在经过几周或几个月的训练后能让你出现以下感受:小腿前后侧都在发力,大腿内侧开始发力,大腿后侧开始发力。之后你在每一次跑步过程中都能同时感觉到它们。 大家看图吧,小腿很多肌肉的肌腱都在和脚尖连着,这些肌肉又与身体其他部分有密切力学连接
正确的跑步方法
1. 正确的跑步方法 跑步的确会使小腿变粗,短跑运动员的小腿就都很粗壮;跑步也会让小腿变得结实,腿部线条更美,马拉松运动员个个小腿都很细。这都是因为跑步姿势和跑步强度导致的。 在跑步的时候,用前脚掌先着地或整个脚同时着地的话,会对小腿前部的胫骨及膝关节造成损伤,并且会强烈刺激小腿肌肉,造成小腿变粗; 如果跑步姿势是尽量用脚跟先着地,然后由脚跟滚动到脚掌。这样跑可以减少跑步对踝关节压力,避免受伤。脚落地时的膝关节保持微曲,不要挺直,对膝关节有一个缓冲作用,还能拉伸小腿,对小腿肌肉的刺激并不强烈。这种跑法就不会使小腿变粗。跑步时,我们需要运用全部腿肌才可把身体跃起。其中主要是前大腿肌肉出力,但却难免会用到小腿肌肉。为了避免出现萝卜腿,跑步完毕后,你可做些拉伸运动,来松弛紧绷的肌肉。 即使采取了正确的跑步姿势,女生在慢跑初期仍会感觉小腿是在“长粗”,这是因为经常跑步后,小腿很疲劳、发僵、发硬、有紧绷感,让女生产生变粗的错觉。 女生跑步还有几个注意事项,一定要戴运动内衣固定胸部要穿专业跑步鞋。
2. 肌肉生长原理 肌肉增长的一个因素是肌肉再受到大重量刺激后,超量恢复的过程,结
果是肌纤维的横截面积增大。横截面积增大,才导致肌肉纬度增加,也就是我们通常说的变粗了变壮了。换句话说就是:增长肌肉就是用大重量的负荷去刺激肌肉, 并且从肌肉内部把肌肉纤维损坏, 并且通过摄入蛋白质修补肌肉纤维损伤的地方得到围度以及增肌肉的效果.而跑步只是承载我们的自重向前作功,根本谈不上是大重量刺激。大多数人觉得跑步上气不接下气的,非常困难,不是因为腿本身累,而是自己的心肺功能跟不上。 --------对应方法:跑步的同时要配合清淡的饮食,不要摄入大量蛋白质,这样就从源头上遏制小腿变粗。 3.跑步的时间 通常来说20分钟内基本肌肉里的糖份和脂肪酸已经被消耗光了,如果再继续跑下去的话,那么身体会燃烧脂肪给予身体能量, 从而去完成剩下的运动. 所以说跑步也好,或者其他有氧运动通常是在40分钟左右才有减脂肪的作用, 总体来说,20分钟的热身和消耗脂肪酸和肌糖. 剩下的20分钟燃烧脂肪。总结起来就是跑步的姿势一定要正确和起码运动不小于40分钟运动量才有减脂肪的效果。(我现在就是差不多40分钟的样子,不过是因为跑得比较慢) 4.跑步的强度 自我感觉自我感觉是掌握运动量和运动强度的重要指标,包括轻度呼吸急促、感到有点心跳、周身微热、面色微红、津津小汗,这表明运动适量;如果有明显的心慌、气短、心口发热、头晕、大汗、疲惫不堪,表
图解 正确的跑步方法
1.正确的跑步方法 跑步的确会使小腿变粗,短跑运动员的小腿就都很粗壮;跑步也会让小腿变得结实,腿部线条更美,马拉松运动员个个小腿都很细。这都是因为跑步姿势和跑步强度导致的。 在跑步的时候,用前脚掌先着地或整个脚同时着地的话,会对小腿前部的胫骨及膝关节造成损伤,并且会强烈刺激小腿肌肉,造成小腿变粗;如果跑步姿势是尽量用脚跟先着地,然后由脚跟滚动到脚掌。这样跑可以减少跑步对踝关节压力,避免受伤。脚落地时的膝关节保持微曲,不要挺直,对膝关节有一个缓冲作用,还能拉伸小腿,对小腿肌肉的刺激并不强烈。这种跑法就不会使小腿变粗。跑步时,我们需要运用全部腿肌才可把身体跃起。其中主要是前大腿肌肉出力,但却难免会用到小腿肌肉。为了避免出现萝卜腿,跑步完毕后,你可做些拉伸运动,来松弛紧绷的肌肉。 即使采取了正确的跑步姿势,女生在慢跑初期仍会感觉小腿是在“长粗”,这是因为经常跑步后,小腿很疲劳、发僵、发硬、有紧绷感,让女生产生变粗的错觉。 女生跑步还有几个注意事项,一定要戴运动内衣固定胸部要穿专业跑步鞋。
2. 肌肉生长原理 肌肉增长的一个因素是肌肉再受到大重量刺激后,超量恢复的过程,结果是肌纤维的横截面积增大。横截面积增大,才导致肌肉纬度增加,也就是我们通常说的变粗了变壮了。换句话说就是:增长肌肉就是用大重量的负荷去刺激肌肉, 并且从肌肉内部把肌肉纤维损坏, 并且通过摄入蛋白质修补肌肉纤维损伤的地方得到围度以及增肌肉的效果.而跑步只是承载我们的自重向前作功,根本谈不上是大重量刺激。大多数人觉得跑步上气不接下气的,非常困难,不是因为腿本身累,而是自己的心肺功能跟不上。 --------对应方法:跑步的同时要配合清淡的饮食,不要摄入大量蛋白质,这样就从源头上遏制小腿变粗。 3.跑步的时间 通常来说20分钟内基本肌肉里的糖份和脂肪酸已经被消耗光了,如果再继续跑下去的话,那么身体会燃烧脂肪给予身体能量, 从而去完成剩下的运动. 所以说跑步也好,或者其他有氧运动通常是在40分钟左右才有减脂肪的作用, 总体来说,20分钟的热身和消耗脂肪酸和肌糖. 剩下的20分钟燃烧脂肪。总结起来就是跑步的姿势一定要正确和起码运动不小于40分钟运动量才有减脂肪的效果。(我现在就是差不