twincat操作方法-ch
Twincat操作方法(概略)
以下简单描述Twincat的操作方法,以供参考。
※若需要阅读Twincat的说明书,请在安装twincat后,再安装“InfoSys.exe”,即可参考Information System
目录
1.准备工作
(1)LAN端口的准备
(2)通信开始的准备
2.从SystemManager进行通信
(1)伺服驱动器的认识方法
(2)SDO操作
(3)PDO操作
3. 使用Twincat PLC Control起动演示程序进行简单的启停动作
1.准备
(1)LAN端口的准备
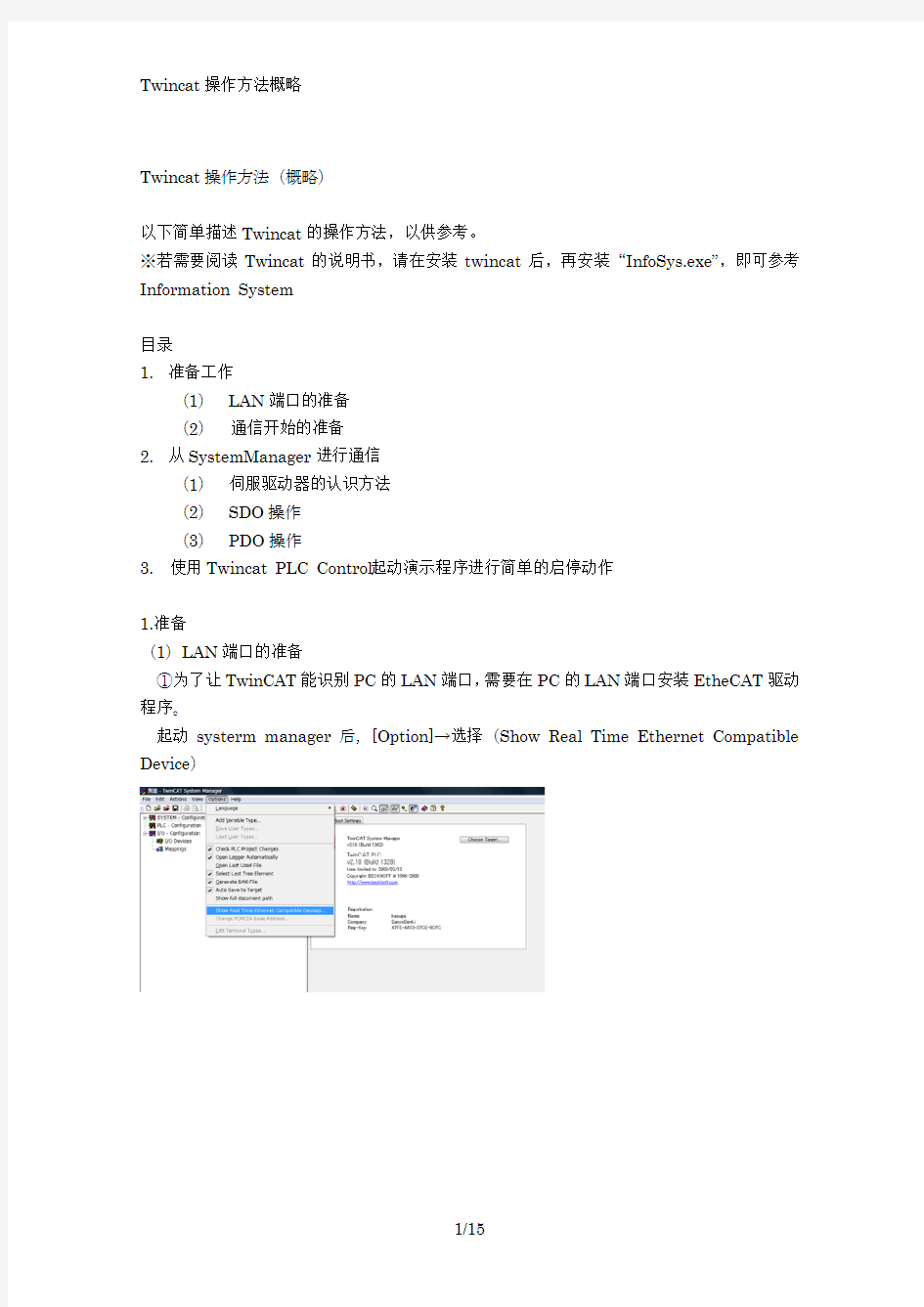
①为了让TwinCAT能识别PC的LAN端口,需要在PC的LAN端口安装EtheCAT驱动程序。
起动systerm manager后,[Option]→选择(Show Real Time Ethernet Compatible Device)
②打开「Installation of Twincat RT-Ethernet Adapters」窗口
Ethernet Adapters的一栏表中会列出Compatible device或者Incompatible device的可使用的LAN端口。选择LAN端口后按Install按钮,LAN端口将移动到Installed and ready to use device 位置。这说明已经被TwinCAT识别。
参考)Compatible device:Intel产的LAN芯片,可以保证同期。
Incompatible device:Intel以外的LAN芯片,不能保证同期。
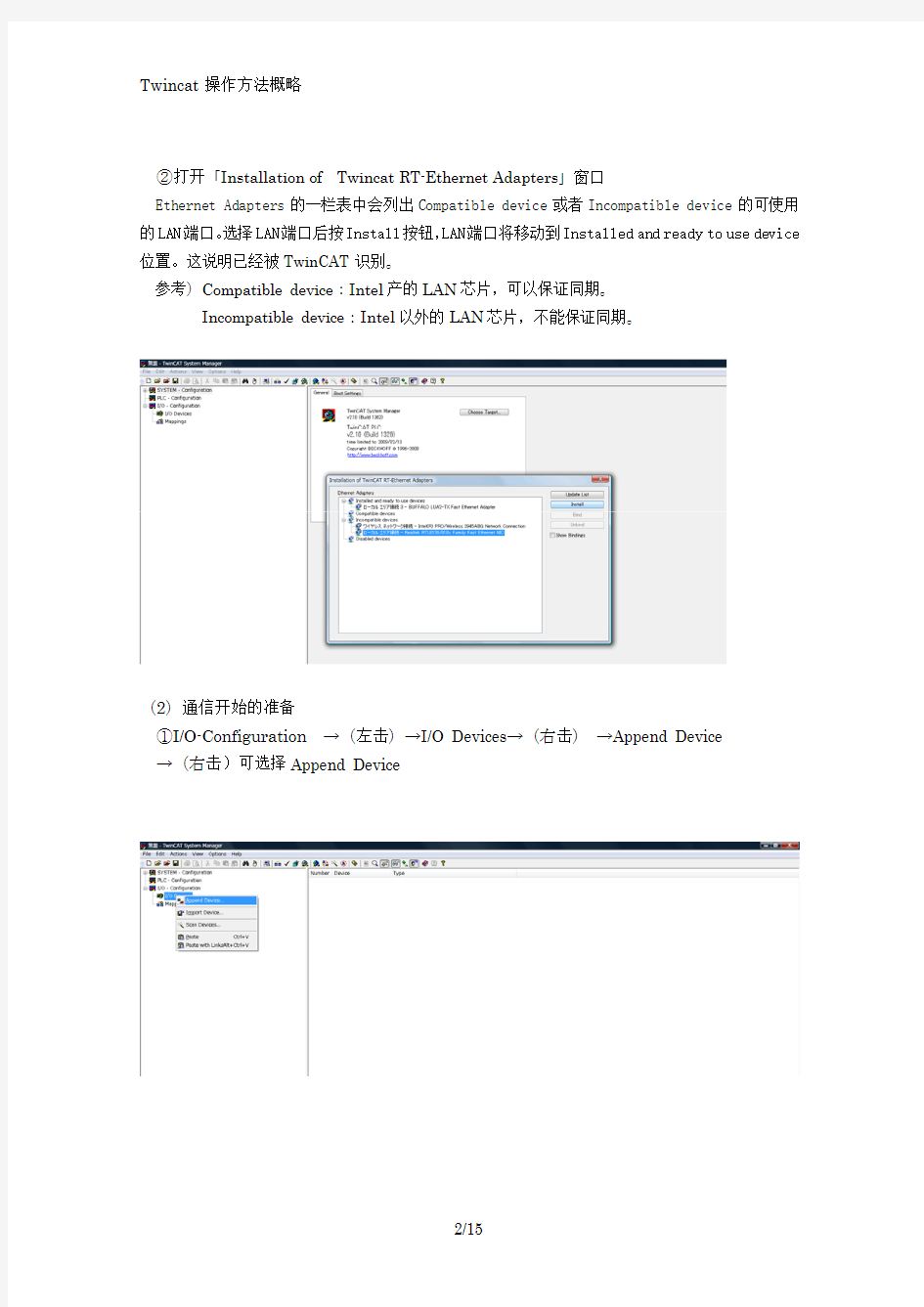
(2)通信开始的准备
①I/O-Configuration→(左击)→I/O Devices→(右击)→Append Device
→(右击)可选择Append Device
②Insert Device的窗口被打开,选择EtherCAT-EtherCAT Adapter(Direct Mode)并按OK按钮。
③Device1(EtherCAT)被追加,从右侧的画面中选择Adapter栏。
然后,按Search
④Device Found At窗口打开,选择先前EtherCAT驱动所安装的LAN端口、按OK。
⑤出现下图的右面画面的话,通信准备结束。
2.从SystemManager通信
(1)伺服驱动器的识别方法
连接马达,LAN电缆后,将伺服驱动器的控制电源ON----即在CN1的rt供给AC220V电源。(无报警的状态下,显示为1根横线。若马达为绝对值编码器,左侧会显示一根横的下线。)
。于伺服驱动器的※若有数根轴一起操作,在(3)-①项目请按同样的顺序进行设定关
菊链连接方式,以有3台驱动器为例:【PC LAN端口】-【伺服驱动器第1轴CN0】、【伺服驱动器第1轴CN1】-【伺服驱动器第2轴CN0】、【伺服驱动器第2轴 CN1】-【伺服驱动器第3轴 CN0】,其间以cat5以上的网线进行连接。推荐使用带屏蔽的网线。
①右击被追加的Device1(EtherCAT),选择Scan Boxes
② 进行①的操作后,如下窗口打开,“EhteCAT drivers found.Add drivers to
NC-Configration”窗口显示,请按No。(不需装NC Configration)
----使用经验:之后会进行NC运转,此处请按Yes,添加NC
③ Drive1被追加。
※若有3台驱动器以菊链形式连接,通常后显示Drive1,Drive2,Drive3。各自可以进行操作。
(2)SDO操作
①从右侧画面选择CoE –Online,按Advanced按钮后Advanced Settings 的窗口打开。从Dictionary画面中选择Online-via SDO Information,按OK按钮。
②由SDO可写入或读出的对象显示出来。需写入的时候,点击Index号码,打开Set Value Dialog窗口,写入数据后点OK。设定值会反映在驱动器的RAM上。若需读出,设定AutoUpdate后会反复读取。
(3)PDO操作
①打开Process Data菜单,按Load PDO info from devices按钮。
由此,可由驱动器读出可以使用的PDO列表。
这些成为SyncManager的Outputs向驱动器传送的数据。INPUT成为从驱动器读取的数据。由Sync Manager选择OUTPUT或者INPUT,可由PDO Assinment栏进行分配。
这里为了示范简单的动作,将OUTPUT的PDO Assignment设定为0x1701、
将INPUT的PDO Assignment设定为0x1B01。
使用实践:注意此步骤后不要再按CoE –Online菜单,否则之后的OP操作将不能正常执行
② ①进行设定PDO Assignment 后,下图的右画面中反映出TxPDO mapping 及RxPDO mapping ,OUTPUT ?RxPDOmapping, INPUT ?TxPDOmapping
点击
③DC(Distributed Clock)的设定
设定同期时钟。打开DC菜单、Operation Mode设定为“DC for syncronization”。
④按Advanced Setting按钮。
⑤Advanced Setting的窗口被打开,Sync Unit Cycle设定为“/4”、Cycle Time被设定为1000(us)。设定后按OK。
⑥选择Distributed Clock的Assign to local uC
⑦ 显示Assign to lacal uC的画面、选择Latch Unit0和Latch Unit1并按OK。
⑧按下图中蓝色的按钮。如下图显示“Active Free Run?”时,选择是(Y)。
⑨将伺服驱动器的主回路ON(驱动器显示为3根横线)
打Online菜单,、从State Machine选择Op。
开
⑩点击循环送信的Process Data的RxPDO mapping项目,会显示Set Value Dialog的窗口,输入值后按OK按钮。
为进行简单的同期速度动作,首先设定Max torque为DEC:300(30%)
?Mode of Operation设定为DEC:9(循环同期速度模式)。
?用Control word进行FSA(Finit State Automation)的变更。
Control word设定为DEC:6
?用Control word进行FSA(Finit State Automation)的变更。
Control word设定为DEC:15 。伺服ON(驱动器显示为绕8字游走)。
?Target velocity设定为DEC:3276800,马达开始运转。
对编码器为131072P/R的电机,3276800/131072=25r/s=150rpm
实践:
要停止马达运转时,按照上述方法:Target velocity设定为DEC:0
Control word设定为DEC:6
参考)
? 推荐以适当的文件名将设定保存下来。