stm32串口通讯
作业二:STM32串口通讯
班级:100712班
学号:10071049
姓名:王云鹏
目录
一、STM32串口通讯设计题目..................................................................................................- 3 -
二、STM32串口通讯电路原理图..............................................................................................- 3 -
三、STM32串口通讯程序..........................................................................................................- 3 -
1、查询方式.........................................................................................................................- 3 -
2、中断方式.........................................................................................................................- 5 -
一、STM32串口通讯设计题目
1、用STM32单片机为主芯片设计一个与计算机串口进行通信的电路。
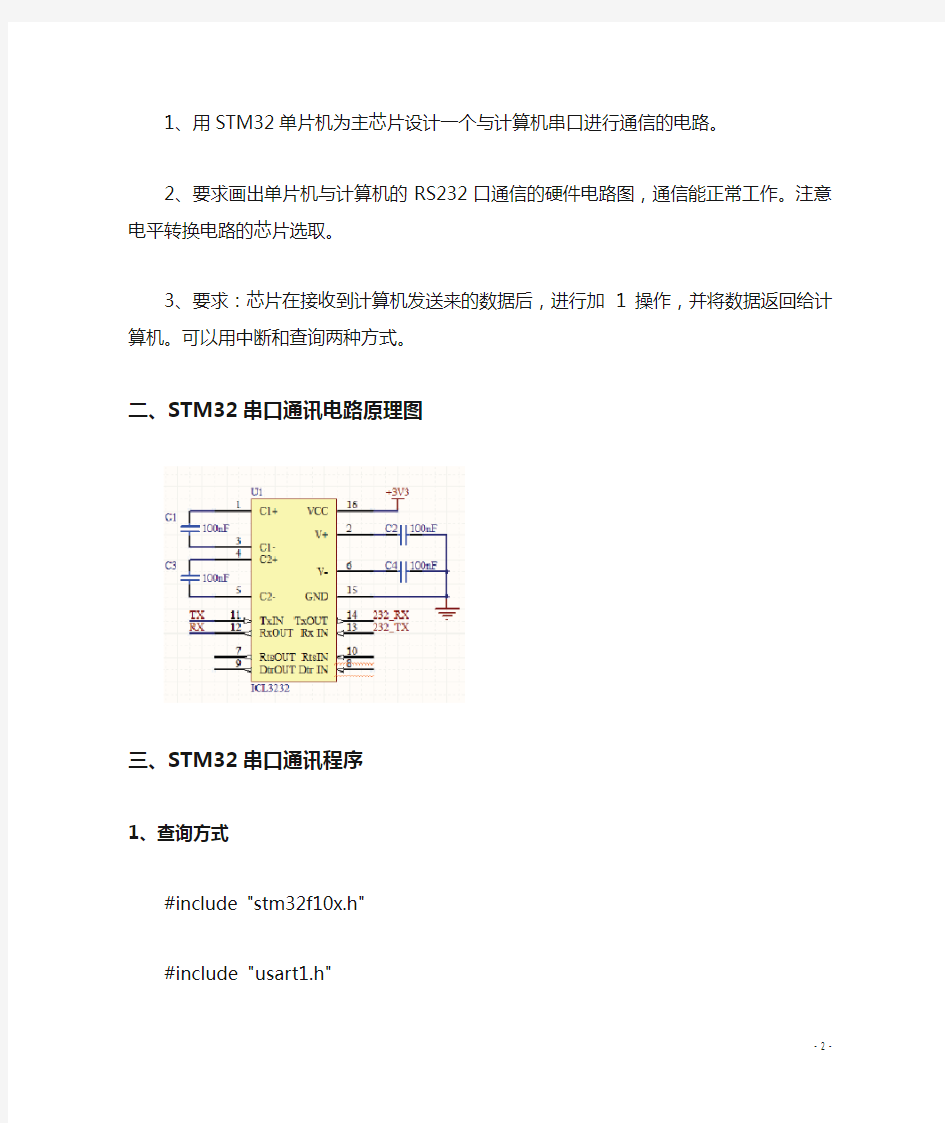
2、要求画出单片机与计算机的RS232口通信的硬件电路图,通信能正常工作。注意电平转换电路的芯片选取。
3、要求:芯片在接收到计算机发送来的数据后,进行加1操作,并将数据返回给计算机。可以用中断和查询两种方式。
二、STM32串口通讯电路原理图
三、STM32串口通讯程序
1、查询方式
#include "stm32f10x.h"
#include "usart1.h"
#include "misc.h"
int main(void)
{
u8 c;
/* USART1 config 115200 8-N-1 */
USART1_Config();
for(;;)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)!= SET);
//等待USART1的接受区不为空c=USART1->DR; //将接收到的值保存在c中
printf("%c",c+1); //将接受到的数据直接返回打印
USART_ClearFlag(USART1, USART_FLAG_RXNE);
}
}
void USART1_Config(void) //USART1 GPIO 配置,工作模式配置
GPIO_InitTypeDefGPIO_InitStructure;
USART_InitTypeDefUSART_InitStructure;
/* config USART1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA,ENABLE); //打开USART1和GPIOA 的时钟
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* USART1 mode config */
USART_https://www.sodocs.net/doc/1318990472.html,ART_BaudRate = 115200;
//波特率115200
USART_https://www.sodocs.net/doc/1318990472.html,ART_WordLength = USART_WordLength_8b;
//8 位数据位
USART_https://www.sodocs.net/doc/1318990472.html,ART_StopBits = USART_StopBits_1;
//1 位停止位
USART_https://www.sodocs.net/doc/1318990472.html,ART_Parity = USART_Parity_No ;
//无奇偶校验位
USART_https://www.sodocs.net/doc/1318990472.html,ART_HardwareFlowControl=USART_HardwareFlowContr ol_None;
//关硬件流
USART_https://www.sodocs.net/doc/1318990472.html,ART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//收发模式
USART_Init(USART1, &USART_InitStructure);
//USART1初始化
USART_Cmd(USART1, ENABLE);
//打开USART1
}
intfputc(intch, FILE *f) //将printf内容发往串口
{
USART_SendData(USART1, (unsigned char) ch);
while (!(USART1->SR &USART_FLAG_TXE));
return (ch);
}
2、中断方式
#include "stm32f10x.h"
#include "usart1.h"
#include "misc.h"
int main(void)
{
/* USART1 config 115200 8-N-1 */
USART1_Config(); //配置USART1
NVIC_Configuration(); //配置NVIC
for(;;)
{
}
}
void USART1_Config(void) // USART1 GPIO 配置,工作模式配置{
GPIO_InitTypeDefGPIO_InitStructure;
USART_InitTypeDefUSART_InitStructure;
/* config USART1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //打开USART1和GPIOA 的时钟
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* USART1 mode config */
USART_https://www.sodocs.net/doc/1318990472.html,ART_BaudRate = 115200;
//波特率115200
USART_https://www.sodocs.net/doc/1318990472.html,ART_WordLength = USART_WordLength_8b;
//8 位数据位
USART_https://www.sodocs.net/doc/1318990472.html,ART_StopBits = USART_StopBits_1;
//1 位停止位
USART_https://www.sodocs.net/doc/1318990472.html,ART_Parity = USART_Parity_No ;
//无奇偶校验位
USART_https://www.sodocs.net/doc/1318990472.html,ART_HardwareFlowControl=USART_HardwareFlowContr ol_None;
//关硬件流
USART_https://www.sodocs.net/doc/1318990472.html,ART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//收发模式
USART_Init(USART1, &USART_InitStructure);
//USART1初始化
USART_Cmd(USART1, ENABLE);
//打开USART1
}
void NVIC_Configuration(void) //NVIC 中断配置
{
NVIC_InitTypeDefNVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
//设置中断优先级组0 /* Enable the USARTy Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //USART1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
//设置打断优先级为1 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
//设置响应优先级为0 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
//打开NVIC
NVIC_Init(&NVIC_InitStructure); //初始化
}
intfputc(intch, FILE *f) //将Printf内容发往串口
{
USART_SendData(USART1, (unsigned char) ch);
while (!(USART1->SR &USART_FLAG_TXE));
return (ch);
}
#include "stm32f10x_it.h"
void USART1_IRQHandler(void)
{
u8 c;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
c=USART1->DR;
printf("%c",c+1); //将接受到的数据直接返回打印}
}