电磁航天器编队飞行系统概述.

电磁航天器编队飞行系统
1、引言
随着各国航天技术的不断发展,航天任务日趋多样化、复杂化,对航天器提出了更高的要求。传统的大卫星研制周期长、耗资多、风险大,而小卫星具有体积小、重量轻、成本低、研制周期短、能利用多种发射方式快速灵活发射等特点,使得小卫星成为大卫星的必要补充。但单颗小卫星由于功能单一,在应用方面受到一定的限制,通常将多颗小卫星进行编队,以实现单一大卫星的功能或对单一大卫星功能进行扩展,完成单颗卫星不能完成的任务。
卫星编队飞行是指一群相距很近、分布在特定轨道构型上、物理上不相连的成员卫星协同工作,共同完成特定任务。通常编队卫星以某一点(主航天器)为基准,构成一个特定几何形状,各颗卫星之间通过星间通信相互联系、协同工作,共同承担空间信号的采集与处理以及承载有效载荷等任务,整个星群构成一个满足任务需要的、规模较大的虚拟传感器或探测器。相对于传统的大卫星,卫星编队飞行具有巨大的观测口径或测量基线,在电子侦察、立体成像、精确定位、气象测量等应用领域具有无法比拟的突出优势,同时多颗卫星组成的分布式传感器系统能够有更好的灵活性和冗余度,可以降低飞行风险和成本。自二十世纪九十年代后期开始,航天器的编队飞行技术越来越引起世界航天领域的极大兴趣和广泛关注。包括美国航空航天局(NASA)、喷气推进实验室(JPL)、美国空军实验室(AirForce)以及欧空局(ESA)在内的多家著名的航天技术研究单位都看好编队飞行技术的广阔前景。图1为美国NASA的轨道列车计划(A-Train),利用六颗卫星编队飞行监测地球环境变化。
图 1 NASA的轨道列车计划
卫星编队飞行过程中要受到地球扁率、大气阻力和太阳光压等各种摄动因素的影响,此外为满足空间观测任务的要求,需要编队系统具有构型重构的机动能力,这就使得卫星要借助地球引力之外的力在非开普勒轨道上进行飞行,传统上一般采用火箭发动机喷气产生的推力来控制编队系统中成员卫星的相对位置,但这种推进方式存在以下几个方面的缺点:(1)火箭发动机喷射产生的羽流会污染临近卫星的光学器件,对空间光学观测任务产生比较大的影响,另外由于推进过程中产生红外线,会影响卫星在轨飞行的隐身效果。
(2)由于喷气推进是一种需要工质的推进方式,在不考虑卫星损毁情况下其工作寿命严格受到卫星所携带推进剂的影响,会影响卫星在轨飞行的寿命;
(3)由于成员卫星所需要的控制力可能有所不同,这会造成各成员卫星燃料消耗的不均衡,现阶段没有在轨加注服务的情况下,将大大制约编队系统整体的寿命;
(4)喷气推进一般采用脉冲式的控制方式,在控制精度和控制效率方面具有一定缺点,而且无法利用连续推力控制方面丰富的研究成果。
为对应上述问题,科学家开始探索利用新的推进方式进行卫星轨道控制。一种思路是利用电推进、太阳帆、等离子体推进等方式控制卫星的绝对轨道运动,从而改变编队成员卫星间的相对位置;另一种思路是利用编队成员之间的相互作用力直接控制卫星之间的相对运动,利用卫星之间的静电力、电磁力等非接触力进行相对位置控制。其中,利用编队成员卫星之间的电磁力来实现卫星编队飞行控制的方案,称之为电磁航天器编队飞行。
2、电磁航天器编队飞行原理
根据近距离作用场的观点,电流之间存在相互作用力,该相互作用力是以磁场为媒介物传递的。因此,将载流线圈置于非均匀磁场中,线圈将同时受电磁力及电磁力矩力矩的作用,线圈除绕自身轴转动外,还会整体的移动。利用该电磁力及电磁力矩,可实现对卫星编队飞行的控制。由于电磁编队飞行采用电能,而电能可通过太阳能获取,所以这一方案既避免了近距离羽流污染及冲击问题,又解决了推进剂限制问题,具有很高的应用价值。
具体的,与传统的喷气推进方法相比,电磁航天器编队飞行在以下几个方面表现出巨大的优势:
(1)由于没有传统的喷气推进方式,消除了羽流效应对周围航天器的影响;
(2)星间作用力完全由太阳能电池板提供的电能实现,几乎不消耗燃料,能够大大提高卫星编队系统的运行寿命;
(3)星间相互作用的产生和控制通过控制线圈电流实现,响应速度快,能够实现高精度的机动控制,此外可以通过调节线圈电流的合理分配来实现各成员卫星电能消耗均衡;
(4)机动过程中通过连续改变电流大小能够实现真正的连续变推力,可以利用丰富的连续变推力控制理论。
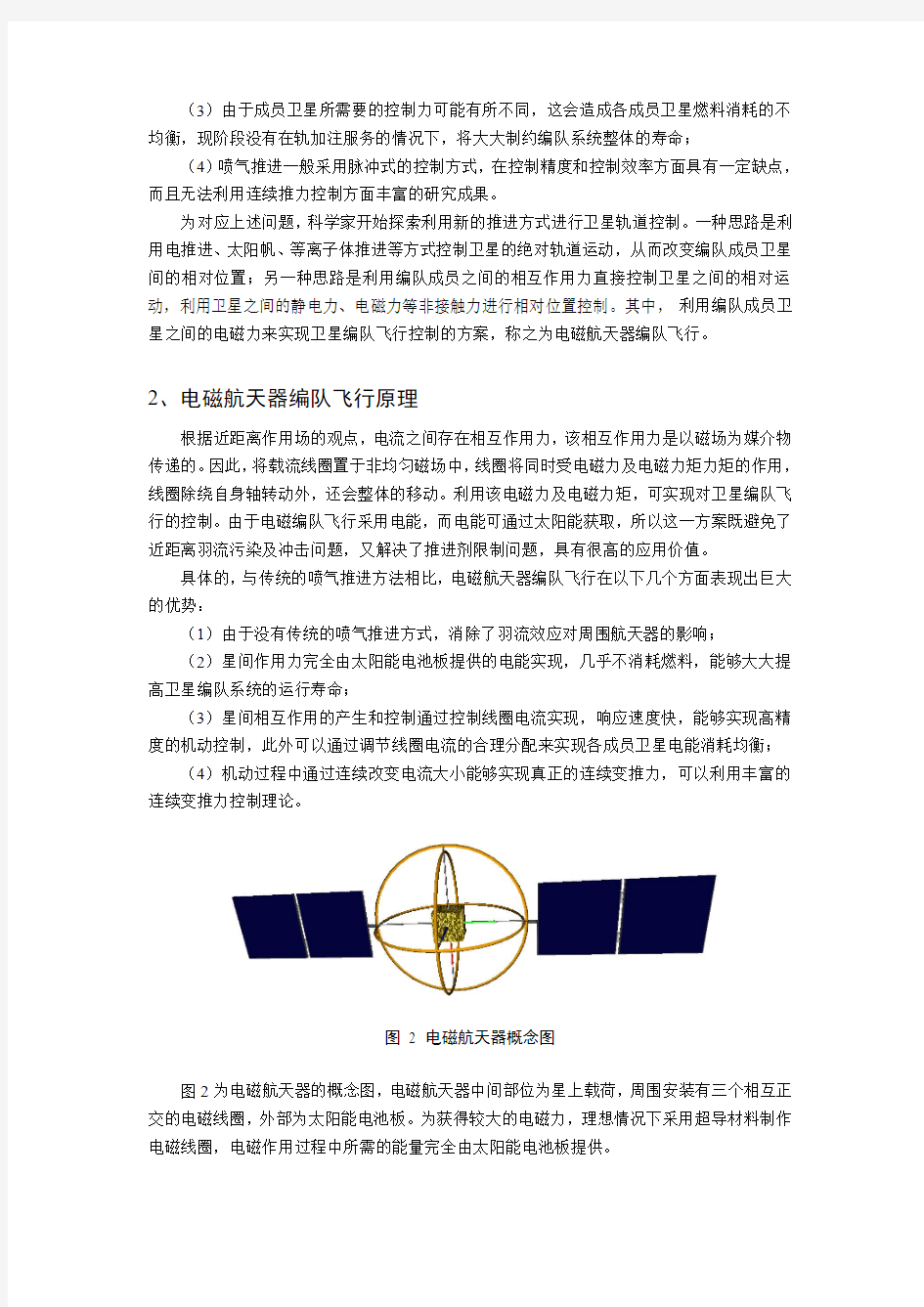
图 2 电磁航天器概念图
图2为电磁航天器的概念图,电磁航天器中间部位为星上载荷,周围安装有三个相互正交的电磁线圈,外部为太阳能电池板。为获得较大的电磁力,理想情况下采用超导材料制作电磁线圈,电磁作用过程中所需的能量完全由太阳能电池板提供。
当电磁线圈通电时,根据电流的磁效应,三个电磁线圈周围会产生磁场,编队中各成员卫星周围的磁场会相互作用,根据比奥·萨瓦尔定律,各成员卫星都会受到相应的电磁力及电磁力矩,如图3所示。在电磁力的作用下,电磁航天器编队系统中成员卫星之间的相对位置会发生变化,在电磁力矩的作用下,其姿态也会产生相应变化。利用星间电磁作用,编队系统中的卫星可以不用消耗推进剂就能够改变姿态,相互之间可以通过改变电流的极性和大小来改变相对位置,实现相互吸引或排斥。由于星间电磁作用是编队系统内力,其不会改变编队系统质心的运动状态。
电磁航天器编队飞行过程中由于地磁场的存在和相互之间电磁力矩的作用,航天器会受到较大的干扰力矩,该干扰力矩将会明显影响航天器的姿态运动,需要借助飞轮或控制力矩陀螺等对姿态进行控制,以抵消干扰力矩,实现轨道姿态运动解耦。
图 3 电磁航天器编队飞行原理示意图
3、发展现状
国外对电磁编队飞行及交会对接技术的研究始于2000年,主要集中在麻省理工学院、马里兰大学、美国NASA约翰逊空间中心、华盛顿大学、德克萨斯大学等单位。
(1)理论研究
在理论研究方面,Kong、Miller等人首先提出了电磁编队飞行的概念,并对其关键技术及可行性进行了分析;Sedwick、Kwon等人通过研究在TPF中使用电磁编队技术,将各项指标与传统推进进行了对比,仿真结果说明TPF采用电磁编队技术能够满足任务的要求,与传统推进方式相比具有显著的优势,从而论证了采用电磁编队替代传统推进的可行性。Hashimoto、等人提出将超导线圈用于电磁编队;Schweighart等人研究了利用正交线圈产生电磁力的方法;Elias对使用电磁体和反作用轮的两个航天器提出了一种非线性动力学模型。Wawrzaszek等人将Elias提出的两个航天器的非线性控制推广到三个航天器线性队列和三角队列中。Umair Ahsun中提出一种作用于地球低轨道上n个航天器电磁编队的非线性自适应
控制律。Schweighart考虑了n个航天器编队问题,他将运动方程描述为每颗卫星磁偶极子的多项式函数并进行了求解。考虑到采用超导线圈的电磁编队系统复杂程度较高,Kwon通过简单的一维模型,研究了使用脉冲偶极子的μEMFF(Micro-Electromagnetic Formation Flight,简称μEMFF)操作,对使用常规导体产生的电磁场进行近距离编队的μEMFF概念进行了可行性论证。
(2)地面试验
地面实验方面,NASA约翰逊空间中心“MiniAERCam”(Miniature Autonomous Extravehicular Robotic Camera)项目主要研究舱外自主微型机器人相机的设计。MiniAERCam 是指一个可在国际空间站周围自由飞行的小型机器人照相机,用于观察国际空间站或航天飞机的照相机难以观察的地方。为了更好地实现机器人照相机与空间站的多次对接与分离,2004年计划对MiniAERCam增加一个电磁对接系统,该系统包含传感器和电磁对接机构。并开发了一个地面试验系统,通过试验系统来测量电磁对接系统的轴向力随三维相对位置的变化,并指导电磁系统的设计。
麻省理工学院“电磁编队飞行(EMFF)”项目由麻省理工学院空间系统实验室(MIT SSL)的David Miller及Raymond Sedwick领导负责,由NASA喷气推进实验室以及洛克希德?马丁公司先进技术中心提供资助。研究过程中,SSL建立了两种实验方案:一种是采用超导线圈产生电磁场,称为HTS EMFF,另一种采用的是普通线圈,称为μEMFF。前者适用于在几十米量级较远距离的机动,后者适用于较为简单的米量级近距离的航天任务。
图 4 EMFF项目地面实验模型
HTS EMFF采用超导线圈产生电磁场,通过调节线圈中的电流和反作用轮来控制相对运动轨道及姿态,每颗卫星的电磁机构由三个相互垂直的超导线圈构成。地面实验系统由气浮台、两个卫星模型及相关测控设备组成。卫星模型主要由电磁机构、通信系统、量测系统、反作用轮组成,实现了两个卫星模型在二维条件下的相对位置保持与圆形轨迹追踪。图4
为该项目的地面实验模型,有两个相互正交的超导电磁线圈组成。地面实验中,超导线圈电流源采用了一套高能量密度的镍化氢(NiMH)电池组,可以提供45A的连续电流和120A 的瞬间峰值电流,电磁系统功率需求在50~100W范围。线圈中间为飞轮系统,两边是两个圆形太阳能帆板。为提供超导线圈工作需要的低温环境(<115K),综合采用了主被动的热控系统。主要冷却装置采用了已在空间望远镜Spitzer系统成功应用的冷却器,质量2.7kg,功率150W。在地面试验中,卫星主要由一套飞轮系统和两个正交的超导线圈组成,飞轮系统提供所需要的姿态,超导线圈产生电磁力。试验中,一个模拟星固定,另一个可以自由运动,控制电流和飞轮使自由星在离固定星某个距离处沿期望轨迹做微小移动(移动量与两星之间间距相比为小量)。该项目在2006年已经完成了两个阶段的可行性研究,并已经获得NASA的额外资助继续进行研究。
μEMFF是采用普通常规导体线圈的电磁编队地面实验,这种系统适用于需要将微小卫星队列的体积保持在较小范围内的操作任务。μEMFF适用于距离小于10米的近距离机动。未来可能应用在分布式卫星抵消J2摄动力和阻力方面。它的控制范围和精度比HTS EMFF 要求要低。而且通过μEMFF线圈的电流持续时间短,电流强度低,不需要复杂的热控系统。采用每个航天器上μEMFF线圈中电流同步脉冲产生的同步瞬间磁场来对编队进行控制。
图 5 μEMFF项目卫星模型图6 μEMFF地面实验示意图
为了验证μEMFF概念,SSL构建了一个概念验证的地面试验台,如图6所示。试验台建立在一个使用低摩擦力空气轴承的可移动架上,两个μEMFF飞行器都通过无线电控制系统进行控制。每个试验飞行器上包含有线圈、电源系统和无线电控制设备。试验中,一个飞行器安装在空气轴承上,另一个在其附近。空气轴承在图6中T形结构的关节处,飞行器和配重可以进行低摩擦的转动。每个飞行器可以绕其安装点旋转,可以使两个飞行器的偶极子在不同距离上保持共线。通过同步控制μEMFF卫星之间的磁场,能够产生引力、斥力和剪力机动。
(3)在轨验证
美国马里兰大学空间动力与推进实验室(UMD SPPL)联合极光飞行科学公司以及麻省理工学院的空间系统实验室(MIT SSL)曾计划在国际空间站上对两种技术进行验证。两种技术都利用一对通电线圈产生的随时间变化的磁场。第一种技术即上文提到的电磁编队飞行(EMFF),利用两组线圈之间的相互作用所产生的电磁力和电磁力矩来控制航天器的相对
运动。第二种技术是使一组线圈通电,另一组线圈则不通电,通过两者之间的电磁耦合效应实现无线输电。所采用的硬件结构被称作RINGS(Resonant Inductive Near-field Generation System),将会被安装在国际空间站中已经存在的试验平台SPHERES上。这项研究由美国DARPA和NASA的戈达德中心共同资助,本来计划将于2012年7月进行在轨飞行。
2013年8月3日,RINGS搭载日本的HTV-4飞船进入国际空间站进行在轨试验。马里兰大学的RINGS项目是电磁航天器编队飞行的一种类型,是由Ray Sedwick团队设计的。之前该项目已经在NASA飞机上进行过微重力环境下的二维自由飘飞试验,这次进入国际空间站是希望能够长时间地在失重环境下进行在轨验证。RINGS试验中有两颗卫星,每颗卫星上都安装有一个聚碳酸酯圆环,圆环中是铝制线圈,能够支持18A的震荡电流。之所以选择铝制线圈是因为其密度比较低,未来实际的卫星系统中将采用超导线圈以增大作用距离,提高作用效果。在轨飞行过程中宇航员将对RINGS进行4组试验,分别对电磁编队飞行技术和星间无线电能传输技术进行验证。这是电磁航天器编队飞行系统第一次在轨飞行,是一次具有里程碑意义的事件,必将对未来航天器的设计与发展产生重要影响。
图7 RINGS在轨试验示意图
图8 RINGS微重力环境试验
4、关键技术
MIT的EMFF试验台从概念形成至今已有近十年的时间,设计方案经过多次的修改,试验过程中也曾出现过一些故障和问题,可以看出电磁编队系统是非常复杂的。根据对电磁编队试验的了解和研究,可以知道电磁编队系统主要的关键技术有:
(1)电磁系统技术
一般而言,电磁体之间的作用力随距离的增加以指数量级减小,因此,确保在一定的距离范围、功耗、质量等约束条件下,提供满足编队飞行与交会对接所需大小的电磁力和力矩,是电磁系统总体设计与结构设计的主要问题。目前解决该问题的主要途径有:一是采用超导线圈;二是在普通线圈中加铁芯以增加电磁力,另外马里兰大学所做的普通线圈中通过脉冲方式控制电磁力的方案也是一种很好的思路。
采用超导线圈来产生电磁力,需要考虑以下几个问题:首先是对材料的要求。要求材料在一定的温度之下,具有稳定的超导现象;为了降低对热控系统的要求,尽可能地减少成本,材料的临界温度要尽可能地高;材料易得或制造成本控制在一定范围之内。
其次是对加工工艺水平的要求。为了产生较大的电磁场,结构中需要有多匝的超导线圈,需要有足够高水平的生产工艺和制造技术,达到较高的精度要求。
此外,还要掌握超导线圈中通电电流的控制技术。通过控制超导线圈中的电流来达到控制电磁力大小的目的。影响电磁力大小的主要因素是通过线圈的电流,而不是电压,由于功耗过低,电压相对来说是比较低的。电路中的电阻仅是电池、线路和开关等系统部件的内阻。因此动力系统的设计不仅必须将内阻降到最低,而且还要能够在低电压、大电流的前提下提供控制的保证。另外为了使磁场能够转换极性,通过线圈的电流必须能够沿正向和反向流动。
(2)热控技术
超导线圈的温度只有低于临界温度时才会产生超导现象,使用电磁力来控制卫星编队构型,需要将超导线圈的温度控制在临界温度以下。电磁编队中的卫星,除了要考虑整星的温度控制,还要另外考虑超导线圈的温度控制。
地面试验中为了达到温控效果,是将超导线圈安放在铜制的外壳里,壳内充满温度为77K的液氮,低温液氮会使超导线圈的温度保持在临界温度之下。壳外包裹上隔热材料,减少液氮的汽化。
如果是太空中运行的卫星采用超导线圈来产生电磁力,使用液氮冷却技术就不是很现实了,需要其他的热控技术。现在国外也有学者开始考虑如何在卫星上对超导线圈的温度进行控制,主要的方式是采用冷却器和低温热管等。
(3)电源系统
采用电磁力作为卫星编队动力的优势之一,就是它在太空中运行时不会受到燃料的限制。电磁力驱动系统的很多部件都需要消耗电能,比如产生电磁力时超导线圈中需要通过很大的电流,控制超导线圈温度时也需要耗费电能,此外反作用轮、量测系统、电子器件等都需要电能,所以对卫星的电源系统提出了比较高的要求。为保证足够的电力供应,需要采用大功率的太阳能帆板或其他方式来提供充足的电能。
(4)相对位置及姿态测量技术
卫星电磁编队实质上是通过电磁力来控制卫星之间的相对位置和相对姿态。为保证控制的精度,在操作过程中需要高精度的量测信息,即相对导航信息。
MIT地面试验中确定相对位置的方法是采用超声波量测原理。但是在太空中,特别是在高轨道,空气十分稀薄,几乎可以视为真空环境,超声波在真真空中无法进行传播,所以不能用来进行测距,需要考虑其他的相对导航方式。对于在低轨上运行的卫星,基于全球定位系统(GPS)的相对导航是一种可行的方法。GPS相对导航只需要在卫星上加装GPS接收器即可,技术较为简单,量测精度也比较高,可以满足应用的需求。
相对姿态可以采用陀螺仪来确定。美国MIT的EMFF试验中也是采用这种方法。当然还可以采用其他方法,比如通过标志点识别确定相对姿态等方法。
(5)相对位置与姿态控制技术
对于位置控制,目前有两种思路:一是首先对系统状态方程进行线性化,然后使用最优控制的方法对位置进行控制;二是使用非线性控制方法对非线性的动力学方程进行控制,MIT试验中用到了滑模控制的方法。
如果操作在标称点附近进行时,系统的非线性效应不是很强,可以将系统状态方程进行线性化,用线性二次调节器对其进行控制。但是,随着距离不断地增加,电磁力会以r-4的速度减小,非线性效应非常明显,不能对系统状态方程进行线性化,此时就要采用非线性控制的方法进行操作。
由于电磁场的作用,在产生电磁力的同时还会产生电磁力矩,使用反作用轮可以抵消电磁力矩引起的旋转运动,这样就对EMFF中的位置运动和角运动进行了解耦,分别进行控制。电磁力矩引起的角运动用反作用轮来平衡,采用LQR的控制方法能够很好地实现对姿态的控制。在选择反作用轮时需要考虑材料的问题,为了减少材料对电磁场的影响,尽量使用磁导率低或不导磁的材料。
(6)传感器
电磁编队系统非常复杂,系统中需要很多量测信息,会使用到各种各样的传感器,所以对于电磁编队来说传感器技术也是非常关键的。MIT的试验中用到了电阻式温度传感器、电流传感器、陀螺仪、转速计等传感器。陀螺仪传感器用来提供飞行器绕铅垂轴旋转的角速率数据。转速计用来读取反作用轮的转速。电流传感器用来测量通过每个线圈的电流,信息可被计算机处理器读取并显示在LCD面板上。
(7)电磁屏蔽
如果使用电磁力对编队的相对位置或姿态进行控制,超导线圈或铁芯会产生比较大的电磁场,卫星上有很多电子元器件,需要考虑电磁场对它们是否会有影响,影响有多大以及如何降低这种影响的程度。另外,在进行相对位置测量时如果采用GPS相对导航,还要考虑电磁场对接收到的GPS信号的影响,此外如果卫星与其他航天器或地面站之间进行无线电通讯联络的话,还需要考虑电磁场对通讯信号有没有影响。
MIT的一些实验表明由单匝线圈产生的50Gauss的磁场强度,不会影响GPS接收机的信噪比。如果电磁场对电子设备的影响比较大,一种解决方法是将敏感的电子设备安放到高导磁合金盒中。如果电磁场对通讯影响比较大,则可以采用分时段通讯的方法,电磁系统工作的时段不进行通讯连接。
(8)地面仿真试验技术
为了验证电磁编队方案的可行性,需要在地面进行大量的地面实验。进行地面实验需要注意一些问题,要保证实验环境与空间环境的一致性或相似性,只有尽可能地接近飞行器实际运行的空间环境,才能保证实验的结果具有说服力,所做的地面实验才有相应的价值。地面实验系统至少需要包含以下几个部分:(1)气浮或液浮基座。主要用于支撑运动飞行器,减少由于运动飞行器在基座上运动而产生摩擦阻力。(2)电磁编队实验飞行器。实验中的飞行器主要部分为电磁系统,附带有其他子系统,用于电磁编队动力学与控制方法的实验验证,工作机制和流程尽可能地与太空真实环境中接近。(3)实验辅助设备。为保证实验的进行,需要对实验提供必要的支持,如电源子系统、测量子系统、计时子系统和数据采集处理子系统等。建立地面实验系统,可以方便地对电磁编队动力学与控制方法进行物理、半物理仿真分析与验证,为电磁编队飞行提供丰富的实验数据和决策依据,能够保证空间飞行任务的可靠性,最大程度地降低飞行任务的风险和成本。
5、结论与建议
电磁编队飞行技术在未来卫星编队近距离操作领域,尤其是长寿命对地观测以及空间科学探测中将会有很大的应用前景。通过对国内外研究现状的分析可以发现,国外在新型电磁航天器方面的研究工作开展较早,已经进行了一些卓有成效的探索,并且通过地面实验验证了电磁编队的相关关键技术,此外还在国际空间站进行了简单的在轨飞行验证试验。目前由于各种技术限制,其在航天器任务中的广泛应用还面临一定困难。
国内这方面还处在理论研究阶段,与国外的差距比较明显,还未对电磁航天器进行全面系统的研究,没有成熟的理论和实验研究成果。该方向的研究具有前瞻性和创新性,可为新一代航天器的设计提供关键技术支持,为未来的分布式航天任务提供设计思想,开展这方面的研究工作不仅有利于未来新概念航天器的设计,而且对于当前的交会对接、在轨组装等任务都具有深远的意义,所以有必要在该领域进行深入研究。
飞行控制系统简介
自动飞行控制系统 飞行控制系统(简称飞控系统)的作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性和减轻驾驶员的工作负担。 深圳市瑞伯达科技有限公司,致力于成为全球无人机飞行器领导品牌,是智能化无人机飞行器及控制系统的研制开发的专业厂商,生产并提供各行业无人机应用的解决方案。产品线涵盖各种尺寸多旋翼飞行器、专业航拍飞行器、无人机飞行控制系统、无人机地面站控制系统、高清远距离数字图像传输系统、专业级无线遥控器、高精飞行器控制模块及各类飞行器配件 飞行器的自动飞行一、问题的提出早在重于空气的飞行器问世时,就有了实现自动控制飞行的设想。1891年海诺姆.马克西姆设计和建造的飞行器上安装了用于改善飞行器纵向稳定性的飞行系统。该系统中用陀螺提供反馈信号,用伺服作动器偏转升降舵。这个设想在基本概念和手段上与现代飞行自动控制系统有惊人的相似,但由于飞机在试飞中失事而未能成为现实。 60年代飞机设计的新思想产生了,即在设计飞机的开始就考虑自动控制系统的作用。基于这种设计思想的飞机称为随控布局飞行器(Control Configured Vehicle 简称CCV)。这种飞机有更多的控制面,这些控制面协同偏转可完成一般飞机难以实现的飞行任务,达到较高的飞行性能。 飞控系统分类飞控系统分为人工飞行控制系统和自动飞行控制系统两大类。由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的系统,称为人工飞行控制系统。最简单的人工飞行控制系统就是机械操纵系统。不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。自动驾驶仪是最基本的自动飞行控制系统。飞控系统构成飞控系统由控制与显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置组成。控制及显示装置是驾驶员输入飞行控制指令和获取飞控系统状态信息的设备,包括驾驶杆、脚蹬、油门杆、控制面板、专用指示灯盘和电子显示器(多功能显示器、平视显示器等)。传感器为飞控系统提供飞机运动参数(航向角、姿态角、角速度、位置、速度、加速度等)、大气数据以及相关机载分系统(如起落架、机轮、液压源、电源、燃油系统等)状态的信息,用于控制、导引和模态转换。飞控计算机是飞控系统的“大脑”,用来完成控制逻辑判断、控制和导引计算、系统管理并输出控制指令和系统状态显示信息。作动器是飞控系统的执行机构,用来按飞控计算机指令驱动飞机的各种舵面、油门杆、喷管、机轮等,以产生控制飞机运动的力和力矩。自测试装置用于飞行前、飞行中、飞行后和地面维护时对系统进行自动监测,以确定系统工作是否正常并判断出现故障的位置。信息传输链用于系统各部件之间传输信息。常用的传输链有电缆、光缆和数据总线。接口装置用于飞控系统和其他机载系统之间的连接,不同的连接情况可以有多种不同的接口形式。 自动飞行控制系统由自动驾驶仪、自动油门杆系统、自动导航系统、自动进场系统和自动着陆系统、自动地形跟随/回避系统构成。 RIBOLD瑞伯达科技有限公司,致力于成为全球飞行影像系统独家先驱,其产品线涵盖无人机飞行控制系统及地面站控制系统、影视航拍飞行平台、商用云台系统、高清远距离数字图像传输系统、无线遥控和成像终端及模型飞行器产品,多旋翼飞行器和高精控制模块。 RBD瑞伯达坚持创新, 以技术和产品为核心,通过完美的产品带来前所未有的飞行体验。我们的目标是做世界一流的无人机企业,为我们的客户提供一流的产品和服务!
杂化轨道详细解说
高中化学7:杂化轨道 1、概念理解 原子在形成分子时,原子轨道不可能只重叠而本身不变,实际上个原子的价电子运动状态必然改变,而使成键能力尽可能增加,体系能量尽可能降低。能量相近的不同原子轨道重新合成相同数目的新原子轨道。通常有sp型、dsp型、spd型等。 杂化并非一个实际过程,而是一个数学概念。为了得到波动方程有关价层电子的解,及波函数而采取的一个步骤。 和原有的s、p轨道相比,杂化轨道分布图具有一个肥大的正瓣,这一区域大大有利于成键轨道之间的重叠。而且杂化轨道空间分布合理,降低了成键电子的排斥。2个方面都有利于体系能量的下降。 2、价层电子对互斥理论(VSEPR理论)对轨道形状的推测2.1、价层电子对互斥理论(VSEPR理论): 对于一个ABm型分子(或离子),围绕中心A原子的价层对子对(包括成键电子对和未成键的孤电子对)的空间分布是受静电相互作用所支配。电子对之间尽可能互相远离,这样斥力小,体系趋于稳定。 2.2、A原子价层电子对数的确定: [A原子价层电子数 + B原子提供的用于形成共价单键的电子数(双剑、三键均按生成一个单键考虑)]/2 若是阴离子,电子数要加阴离子电荷数,阳离子则要减去。 B是H或卤素元素,每个原子提供一个共用电子。 B若是是氧族元素,规定不提供共用电子。
四氯化碲TeCl4分子:Te有6个价层电子,加上4个Cl提供的共用电子,中心Te原子价层电子数等于10,对数为5。 SO42-离子:S有6个价层电子,规定O原子不提供共用电子,加上离子电荷数2,中心S原子价层电子数等于8,对数为4。 2.3、VSEPR理论推测分子形状: 判断非过渡元素化合物的分子(或离子)的几何构型是相当成功的。价层电子对数在4以内,未发现例外;价层电子对数为5、6时,发现个别例外;价层电子对数为7以上时,中心不单一,出入较大;步骤:1、确定中心原子的价层电子对数 2、确定价层电子对对应的最佳分布构型:2直线、3平面三角、4正四面体、5三角双锥体、6正八面体。 3、依据价层电子对相互作用斥力大小选出最稳定布局。依此布局将配位原子排列在中心原子周围。 电子对之间斥力大小:孤-孤>孤-成>成-成 按照力学分析,很好理解。 2个同等力作用1个点,稳定结构是直线,夹角180度。 3个同等力作用1个点,稳定结构是平面,夹角120度。 4个同等力作用1个点,稳定结构是(正四面体、平面正方体等),正四面体夹角109.5度。 5个同等力作用1个点,稳定结构是三角双锥体 6个同等力作用1个点,稳定结构是正八面体
《数据库系统概论》复习总结
《数据库原理》 第一章绪论 本章内容:数据库系统概述、数据模型、数据库系统结构 本章主要考点:数据、数据库、数据库管理系统的概念、概念模型、三种数据模型、数据独立性、常用DBMS、DBA 对应目标1题型:选择题5个,10分;简答题1个,5分。共15分 1、试述数据、数据库、数据库系统、数据库管理系统的概念 (1)数据(Data) :描述事物的符号记录称为数据。 (2)数据库(Data Base ,简称DB ):数据库是长期储存在计算机内的、有组织的、可共享的数据集合。 (3)数据库系统(Data Base System ,简称DBS ) :数据库系统是指在计算机系统中引入数据库后的系统构成,一般由数据库、数据库管理系统(及其开发工具)、应用系统、数据库管理员构成。 (4)数据库管理系统(DataBase Management System,简称DBMS ) :数据库管理系统是位于用户与操作系统之间的一层数据管理软件,用于科学地组织和存储数据、高效地获取和维护数据。 2、对于DB、DBS、DBMS的关系,下列哪一种描述是正确的(B) A、DB包括DBS、DBMS B、DBS包括DB、DBMS C、DBMS包括DBS、DB D、以上都不对 3、数据库领域中最常用的逻辑数据模型有层次模型、网状模型、关系模型等。 4、对数据库中进行增加记录类型或增加数据项,通过调整下列哪一级映像,可以使应用程序尽 可能保持不变,便达到了哪一种数据的独立性(A) A、外模式/模式映像,逻辑数据独立性 B、外模式/模式映像,物理数据独立性 C、模式/内模式映像,逻辑数据独立性 D、模式/内模式映像,物理数据独立性 第二章关系数据库 本章内容:关系数据结构及形式化定义、关系操作、关系的完整性、关系代数 本章主要考点:概念、关系的完整性、★★关系代数 对应目标3题型:计算题3个,6分;写关系代数表达式3个,9分共15分。 1、关系数据库管理系统应能实现的专门关系运算包括(B)。 A.排序、索引、统B.选择、投影、连接C.关联、更新、排序D.显示、打印、制表2、自然连接是构成新关系的有效方法。一般情况下,当对关系R和S使用自然连接时,要求R 和S含有一个或多个共有的(D)。 A.元组B.行C.记录D.属性 3、关系运算中花费时间可能最长的运算是(C)。 A.投影B.选择C.笛卡尔积D.除 4、关系模式的任何属性(A)。 A.不可再分B.可再分C.命名在该关系模式中可以不惟一D.以上都不是
数据库系统学习概论总结
数据库系统学习概论总结
数据库系统概论小结 数据库技术是人类生活过程中对数据管理任务的需要而产生的。计算机对数据的管理过程大致经过了三个主要阶段,一、人工管理阶段; 二、文件管理阶段;三、数据库管理阶段。随着计算机技术的飞速发展,软、硬件水平的不断提高,人类利用计算机管理数据的能力也越来越高。同人工和文件管理阶段,数据库管理的主要特点是:数据结构化,数据共享性高、冗余度低且以扩充,数据独立性高,有完整的数据库管理系统控制数据的能力和提供数据安全性、完整性和并发控制的能力。 数据库,顾名思义,就是指存放数据的仓库。严格的定义指,长期存储在计算机内、有组织、可共享的大量数据的集合。有了数据库的概念之后,为了利用这种技术,人们提出了数据库管理系统的概念(DBMS),那么DBMS实际上是位于用户与操作系统之间的一层管理软件,其主要功能有: 1.数据定义功能 2.数据组织、存储和管理
3.数据操纵功能 4.数据库的事务管理和运行管理 5.数据库的建立和维护功能 6.其他功能 实时数据库首先是一个数据库管理系统,它应具有一般DBMS的基本功能: 1.永久数据管理,包括数据库的定义、存储和维护等; 2.有效的数据存取,包括各种数据库操作、查询处理、存取方法和完整性检查; 3.任务的调度与并发控制; 4.存取控制和安全性检查; 5.数据库恢复机制,增强数据库的可靠性。 关系型数据库具有开放性好、数据处理能力强等特点,在系统中它作为第三 方和用户二次开发的接口,以及内存数据库的转储介质而存在。 一般的,由数据库、数据库管理系统、应用系统、数据库管理员共同构成了一个完整的数据库系统。数据库技术是计算机领域发展最快的技
飞行管理系统
第16章飞行管理系统 16.1飞行管理系统概述 随着飞机性能的不断提高,要求飞行控制系统实现的功能越来越多,系统变得越来越复杂,从而迫使系统系统设计师们在可用的技术条件、任务和用户要求,飞机可用空间和动力,飞机的气动力特性及规范要求等诸因素的限制下,把许多分系统综合起来,实施有效的统一控制和管理。于是便出现了新一代数字化、智能化、综合化的电子系统-飞行管理系统(FMS-Flight Management System)。在1981年12月,飞行管理系统首次安装在B767型飞机上。此后生产的大中型飞机广泛采用飞行管理系统。 16.2飞行管理系统的组成和功能 16.2.1飞行管理系统的组成 飞行管理系统由几个独立的系统组成。典型的飞行管理系统一般由四个分系统组成,如图16-1,包括: (1)处理分系统-飞行管理计算机系统(FMCS),是整个系统的核心; (2)执行分系统-自动飞行指引系统和自动油门,见自动飞行控制系统; (3)显示分系统-电子飞行仪表系统(EFIS),见仪表系统; (4)传感器分系统-惯性基准系统(IRS)、数字大气数据计算机(DADC)和无线电导航设备。 驾驶舱主要控制组件是自动飞行指引系统的方式控制面板(AFDS MCP)、两部控制显示组件(CDU)、两部电子飞行仪表系统(EFIS)控制面板。主要显示装置是CDU、电子姿态指引仪(EADI)、电子水平状态指示器(EHSI)和推力方式显示。各部分都是一个独立的系统,既可以单独使用,又可以有多种组合形式。飞行管理系统一词的概念是将这些独立的部分组成一个综合系统,它可提供连续的自动导航、指引和性能管理。
图16-1飞行管理系统 16.2.2飞行管理系统的功能 FMS的主要功能包括导航/制导、自动飞行控制、性能管理和咨询/报警功能。FMS实现了全自动导航,大大减轻了驾驶员的工作负担。另外,飞机可以在FMS的控制下,以最佳的飞行路径、最佳的飞行剖面和最省油的飞行方式完成从起飞直到进近着陆的整个飞行过程。 FMS在各飞行阶段的性能管理功能: (1)起飞前 通过FMS的控制显示组件人工向FMC输入飞行计划、飞机全重和外界温度。如果飞行计划已经存入FMC的导航数据库,则可直接调入。飞行计划包括起飞机场、沿途航路点和目的机场的经纬度、高度等。 (2)起飞 根据驾驶员输入的飞机全重和外界温度,FMC计算最佳起飞目标推力。 (3)爬升 根据驾驶员的选择,FMC计算最佳爬升剖面。FMC还根据情况向驾驶员提供阶梯爬升和爬升地点的建议,供驾驶员选择,以进一步节约燃油。 (4)巡航 FMC根据航线长短、航路情况等因素,选择最佳巡航高度和速度。结合导航设施,确定起飞机场至目的机场的大圆航线,以缩短飞行距离。 (5)下降 FMC根据驾驶员输入或存储的导航数据确定飞机下降的顶点。在下降阶段,FMC确定下降速度,最大限度利用飞机的势能,节约燃油。 (6)进近 FMS以优化速度引导飞机到达跑道入口和着陆点。 16.2.3飞行管理计算机系统 由飞行管理计算机(FMC)和控制显示组件(CDU)组成。
张书铭 15051251 无人飞行器系统概论课程总结与感想.
无人飞行器系统综述 学生姓名:张书铭 院系:航空科学与工程学院 班级:150519班 学号:15051251 2015年12月
一、引言 无人飞行器系统是以无人机为主体,由多个分系统组成的复杂系统,集成了航空技术、信息技术、控制技术、测控技术、传感技术以及新材料、新能源等多学科技术,已成为航空航天的一个新的发展方向。无人机的发展历史可以追溯到上一世纪20 年代,应技术进步和战争需求,无人机已逐渐发展为世界各国尤其是发达国家武器装备中重要组成部分之一,无人化也已日益成为未来战争发展的方向之一,同时无人机也正在向民用化发展。进入20 世纪末,无人机发展进入了一个新时代并先后形成三次发展浪潮。目前,世界各主要国家尽管发展方向和发展程度各异,但无不积极研制开发无人机,在进一步发展军事用途的同时又扩展到民用领域,一个无人机发展高潮正在到来。 二、无人飞行器系统简述 无人驾驶飞机简称“无人机”,英文缩写为“UA V”,是利用无线电遥控设备和自备的程控装置操纵的不载人飞机。从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机等。而无人机系统,英文缩写为“UAS”,是以无人机为主体,配有相关的分系统,能完成特定任务的一组设备。无人飞行器系统一般由无人机平台、测控与信息传输分系统、飞行控制与导航系统、任务载荷、发射与回收系统和地面运输与保障系统组成。 无人机系统按重量、航程和飞行高度可分为:微型无人机(重量一般不超过1kg)、小型无人机(重量一般不超过20kg,航程不超过30km)、近程无人机(航程能达到100km)、中程无人机(航程能达到500km)、中空长航时无人机(航程超过500km,续航时间20 小时以上,飞行高度5000到10000m)和高空长航时无人机(航程达到10000km,续航时间20 小时以上,飞行高度达到15000m)。 相比有人驾驶飞行器,无人机有着用途广泛,成本低,效费比好,无人员伤亡风险,生存能力强,机动性能好,使用方便等优势,适用于执行“枯燥的、脏的、危险的”所谓“3D”任务,能在核污染、化学污染地区和战争前沿侦察,能在极端恶劣天气下飞行,在现代战争中有着极其重要的作用。无人机执行的任务分为攻击杀伤型和非攻击杀伤型。美国海军给无人机划分了以下任务分区:
价层电子对的几种计算方法
在计算价层电子数时,可以有多个物理模型供选用。在常见的化学教材或教学参考资料中,可以看到有3种其间有显著不同的计算价层电子对数目的模型,产生3类不同的方法。(一)元素种类法 元素种类法的特点在于,对非过渡系ABm型分子来说,用配原子的种类来确定它向中心原子提供的价层电子数。它规定: 当H及卤原子作配原子时,每个配原子向中心原子提供1个价层电子; 而当O、S原子作配原子时,它们都并不向中心原子提供价层电子; 而当N原子作配原子时,它不仅不向中心原子提供价层电子,反而要从中心原子拉走1个价层电子。 如对SO2分子。中心S原子有6个价电子,而作为配原子的O原子并不向中心原子提供电子,S的价层电子数仍为6,价层电子数对为3。所以,S原子的电子云呈三角形分布。S原子位于三角形的中心附近,电子云分别指向三角形的三个顶点。考虑到3个电子云,只有2个与O原子结合,另1个被孤电子对占据,分子应该为角型。 (二)电子式法] 电子式法则是用分子的点电子式中,电子对及电子组的数目,来确定中心原子的价层电子对数。 它规定:中心原子周围的电子对(包括成键电子对和孤电子对)及电子组数(双键的4个电子、或叁键的6个电子,都只能算是1个电子组)之和,就是中心原子的价层电子对数。如对SO2分子。根据八隅体原则写出电子式(如左下图)后,可以看出S原子上方有1孤电子对、与右侧O原子结合用了1电子对、与左侧O原子结合用的是4个电子(双键)——为1个电子组。 这样,属于中心原子的电子对数为1、孤电子对数为1、电子组数为1,合计为3。因而价层电子对数为3。与元素种类法的判断结果相同。 电子式法与元素种类法的另一个区别是,在电子式法中没有可以成单的价层电子数的概念。最小的单位也是1个价层电子对。 (三)结构式法 结构式法与另两个方法的区别在于,对非过渡系元素构成的分子来说,用结构式中共价键的性质不同,来确定相关配原子向中心原子提供的价层电子数。它规定:
数据库系统概论部分知识点总结
1、表中的一条记录就是一个实例,反映数据库某一时刻的状态。 2、数据库整体结构 3、数据(Data)是数据库中存储的基本对象 数据的定义:描述事物的符号记录 数据的种类:文本、图形、图像、音频、视频、学生的档案记录、货物的运输情况等 数据的特点:数据与其语义是不可分的 4、数据库的定义:数据库(Database,简称DB)是长期储存在计算机内、有组织的、可 共享的大量数据的集合。 5、数据库的基本特征: a)数据按一定的数据模型组织、描述和储存 b)可为各种用户共享 c)冗余度较小 d)数据独立性较高 e)易扩展 6、什么是DBMS: 位于用户与操作系统之间的一层数据管理软件。 是基础软件,是一个大型复杂的软件系统 7、DBMS的用途:科学地组织和存储数据、高效地获取和维护数据 8、DBMS的主要功能: ?数据定义功能 提供数据定义语言(DDL) 定义数据库中的数据对象 ?数据组织、存储和管理 分类组织、存储和管理各种数据 确定组织数据的文件结构和存取方式 实现数据之间的联系 提供多种存取方法提高存取效率 ?数据操纵功能 提供数据操纵语言(DML) 实现对数据库的基本操作 (查询、插入、删除和修改) ?数据库的事务管理和运行管理 数据库在建立、运行和维护时由DBMS统一管理和控制 保证数据的安全性、完整性、多用户对数据的并发使用 发生故障后的系统恢复 ?数据库的建立和维护功能(实用程序) 数据库初始数据装载转换、数据库转储 介质故障恢复、数据库的重组织 性能监视分析等 ?其它功能 DBMS与网络中其它软件系统的通信 两个DBMS系统的数据转换
异构数据库之间的互访和互操作 9、数据库系统(Database System,简称DBS):在计算机系统中引入数据库后的系统 构成 10、数据库系统的构成: a)数据库 b)数据库管理系统(及其开发工具) c)应用系统 d)数据库管理员 11、数据库中实现的是数据的真正结构化 a)数据的结构用数据模型描述,无需程序定义和解释 b)数据可以变长 c)数据的最小存取单位是数据项 12、整体数据的结构化是数据库的主要特征之一 13、文件系统阶段: a)记录内有结构。 b)数据的结构是靠程序定义和解释的。 c)数据只能是定长的。 d)可以间接实现数据变长要求,但访问相应数据的应用程序复杂了。 e)文件间是独立的,因此数据整体无结构。 f)可以间接实现数据整体的有结构,但必须在应用程序中对描述数据间的联系。 g)数据的最小存取单位是记录。 14、数据库管理阶段的特点: a)共享性:数据库系统从整个角度看待和描述数据,数据面向整个系统,可以被 多个用户、多个应用所共享。减少数据冗余,节约存储空间;避免了数据之间 的不相容性和不一致性;使系统易于扩充。 b)独立性:物理独立性,指应用程序与存储在磁盘上数据库中的数据是相互独立 的。当数据的物理存储改变了,应用程序不用改变;逻辑独立性,指用户的应 用程序与数据库的逻辑结构是相互独立的。数据的逻辑结构改变了,用户程序 也可以不变。数据独立性是由DBMS的二级映像功能来保证的 c)统一管理: (1)数据的安全性(Security)保护 保护数据,以防止不合法的使用造成的数据的泄密和破坏。 (2)数据的完整性(Integrity)检查 将数据控制在有效的范围内,或保证数据之间满足一定的关系。 (3)并发(Concurrency)控制 对多用户的并发操作加以控制和协调,防止相互干扰而得到错误的结果。 (4)数据库恢复(Recovery) 将数据库从错误状态恢复到某一已知的正确状态。 15、在数据库中用数据模型这个工具来抽象、表示和处理现实世界中的数据和信 息。 16、通俗地讲数据模型就是现实世界的模拟 17、数据模型分为两类(分属两个不同的层次): (1) 概念模型也称信息模型,它是按用户的观点来对数据和信息建模,用于
飞行管理系统介绍
飞行管理系统介绍 一、飞行管理系统(FMC)组成和基本功用 (一)、飞行管理系统(FLIGHT MANAGEMENT SYS)由五个分系统组成:1、飞行控制系统(DFCS) 包括自动驾驶(A/P)和飞行指引(F/D),其核心为两台飞行控制计算机,该系统用于自动飞行控制(FCC)和飞行指引。 2、自动油门系统(A/T) 其核心是一台自动油门计算机和两台发动机油门操纵的伺服机构,A/T 提供从起飞到着陆全飞行过程的油门控制。 3、飞行管理计算机系统(FMCS) 其核心是一台飞行管理计算机FMC和两台控制显示组件CDU,它用于从起飞到进近的几乎全部飞行过程的横向(LATERAL)剖面和纵向(VERTICAL)剖面的飞行管理。 我部的34N型飞机装有两部FMCS,这使飞行管理系统的可靠性更高。 4、惯性基准系统(IRUS) 其核心为两台惯导基准组件IRU,其主要功用为提供飞机的姿态基准和定位参数,也可用于飞机自备、远距导航。 5、电子飞行仪表系统(EFIS) 33A和34N型飞机装备的是电子飞行仪表系统,3T0型飞机装备的还是旧式的机械式仪表。由于飞行仪表的电子化,逐渐淘汰老式的机械式仪表,而电子飞行仪表必须有相应的字符,符号等图形信号发生器,以提供阴极射线管CRT或液晶LCD显示。EFIS就是起这个作用的电子式飞行仪表显示系统,它主要包括两台符号发生器(EFIS SG)和两套姿态指引仪(EADI)、两套水平状态指示器(EHSI)。
(二)、飞行管理系统的基本作用: 这套系统技术先进,设备量大,承担的任务多,其中最根本的功用是:1、实现飞行的自动化,大大减轻了飞行员的工作负担,减少人为操作所不可避免的差错和失误。 2、实现飞行全程的优化: (1)起飞阶段(TO)—根据飞机的全重和环境温度提供最佳目标推力。(2)爬升降段(CLB)—提供最佳爬升剖面:包括爬升点,阶段爬升的设置,目标推力和目标空速的设定。 (3)巡航(CRZ)—提供最佳高度和巡航速度,以及大圆航线和导航系统的选择和自动调谐。 (4)下降阶段(DSE)—提供下降顶点,目标下降速度和分段,以充分利用飞机高度下降所得到的动能,并以最佳的高度,速度和距离转入进近阶段。(5)进近(APP)—确定飞机在五边进近基准点时的高度、空速和距离。 飞行的优化不仅得到最合理的飞行路径,节省燃油和飞行时间,而且飞机机体的损耗率最少。 3、实现自动着陆 由于有两套自动驾驶通道,具有余度通道,借助仪表着陆系统可实现Ⅱ类气象标准的自动着陆(决断高度50英尺,跑道能见距离700英尺)和自动复飞。 二、FMC控制飞行过程工作概述 飞行过程可归纳为正常程序和辅助正常程序 1、正常程序 所谓正常程序就是自动飞行的标准程序,可分为如下七个飞行阶段:(1)起飞TAKE OFF 在完成起飞前准备后,只要按压TO/GA开关,即开始起飞程序,此时推力杆自动前进到起飞目标N1值,当飞机滑跑达到60节时,F/D指令杆提
关于中心原子杂化轨道数的计算方法
第26卷第3期2011年6月 大学化学 UNIVERSITY CHEMISTRY Vol.26No.3 Jun.2011关于中心原子杂化轨道数的计算方法 苏金昌 (大庆教育中心黑龙江大庆163001) 摘要对于H m AB n 型的共价分子(或离子),本文提出用公式G=V/2-3n计算中心原子A的杂化轨道 数,并由此确定对应的杂化轨道类型。该方法简单、直接、有效。 关键词中心原子价层电子总数杂化轨道数杂化轨道类型 杂化轨道理论是大学化学的重要基础理论之一,主要用来讨论共价分子(或离子)的成键情况以及预测其几何构型或阐述其物理化学性质。对于如何判定给定的分子(或离子)的中心原子轨道杂化方式,在杂化轨道理论里并没有系统论述,导致在应用杂化轨道理论教与学时遇到困难。为了有利于应用杂化轨道理论阐述相关问题,本文给出一个有关中心原子杂化轨道数的计算公式,并根据计算得出的杂化轨道数确定对应的杂化轨道类型。 1中心原子杂化轨道数的计算公式 在H m AB n型共价分子(或离子)中,设A为选定的中心原子,H为与A直接相连的氢原子(或氢离子)配位体,B为与A直接相连的非氢原子及其离子(或价电子数不大于8的原子团及其离子,如OH 与OH-)配位体;n、m分别为B、H的数目(即配位数);V为H m AB n型分子(或离子)的价电子总数,即所有原子(m个H、1个A和n个B)的价电子数之代数和。计算价电子总数V时应该注意的是:对于阴离子要再加上所带的电荷数,例如,PO3-4的价电子总数V=5+6?4+3=32;对于阳离子要再减去所带的电荷数,例如,NH4+的价电子总数V=5+1?4-1=8。 根据价键理论,在共价分子(或离子)中,氢原子(H)的价层一般满足2电子的稳定结构,而非氢原子(B)的价层一般满足8电子的稳定结构。当每个H、B都通过一个双电子的σ键与A共享2个电子时,满足2电子稳定结构的每个H的价电子就都参与了双电子σ键的形成,并没有剩余未成键的价电子;而每个B的价层8个电子中除了有2个是与中心原子A共用的σ键电子外,还有6个是未参与双电子σ键的电子,n个B共有6n个电子未参与σ键形成。那么,对于H m AB n的V个价电子中余下的(V-6n)个价电子,如果假定它们都有在A与B、A与H之间形成双电子σ键的倾向,则中心原子A倾向参与形成双电子σ键的最大数为:(V-6n)/2,即V/2-3n。 假定在共价分子(或离子)中,中心原子键合时之所以进行轨道杂化,其主要目的是最大限度地促进中心原子与配位体之间形成更多牢固的σ键,即尽可能地促使σ键的数目倾向于最大。因为“头碰头”式重叠的σ键越多、越牢固,构成的分子(或离子)就越稳定。可见,中心原子倾向参与形成σ键的最大数与其杂化轨道数之间存在着对应关系。若令G表示中心原子A的杂化轨道数,则计算中心原子杂化轨道数的公式可写为: G=V/2-3n(1)由式(1)可知,G的大小与V、n有关。即对于H m AB n型分子(或离子),其中心原子(A)的杂化轨道数(G),由分子(或离子)的价电子总数(V)和非氢配位体数目(n)决定。 (1)计算得出的中心原子的杂化轨道数及其杂化轨道类型、杂化轨道空间取向的对应关系归
电磁航天器编队飞行系统概述.
电磁航天器编队飞行系统 1、引言 随着各国航天技术的不断发展,航天任务日趋多样化、复杂化,对航天器提出了更高的要求。传统的大卫星研制周期长、耗资多、风险大,而小卫星具有体积小、重量轻、成本低、研制周期短、能利用多种发射方式快速灵活发射等特点,使得小卫星成为大卫星的必要补充。但单颗小卫星由于功能单一,在应用方面受到一定的限制,通常将多颗小卫星进行编队,以实现单一大卫星的功能或对单一大卫星功能进行扩展,完成单颗卫星不能完成的任务。 卫星编队飞行是指一群相距很近、分布在特定轨道构型上、物理上不相连的成员卫星协同工作,共同完成特定任务。通常编队卫星以某一点(主航天器)为基准,构成一个特定几何形状,各颗卫星之间通过星间通信相互联系、协同工作,共同承担空间信号的采集与处理以及承载有效载荷等任务,整个星群构成一个满足任务需要的、规模较大的虚拟传感器或探测器。相对于传统的大卫星,卫星编队飞行具有巨大的观测口径或测量基线,在电子侦察、立体成像、精确定位、气象测量等应用领域具有无法比拟的突出优势,同时多颗卫星组成的分布式传感器系统能够有更好的灵活性和冗余度,可以降低飞行风险和成本。自二十世纪九十年代后期开始,航天器的编队飞行技术越来越引起世界航天领域的极大兴趣和广泛关注。包括美国航空航天局(NASA)、喷气推进实验室(JPL)、美国空军实验室(AirForce)以及欧空局(ESA)在内的多家著名的航天技术研究单位都看好编队飞行技术的广阔前景。图1为美国NASA的轨道列车计划(A-Train),利用六颗卫星编队飞行监测地球环境变化。 图 1 NASA的轨道列车计划 卫星编队飞行过程中要受到地球扁率、大气阻力和太阳光压等各种摄动因素的影响,此外为满足空间观测任务的要求,需要编队系统具有构型重构的机动能力,这就使得卫星要借助地球引力之外的力在非开普勒轨道上进行飞行,传统上一般采用火箭发动机喷气产生的推力来控制编队系统中成员卫星的相对位置,但这种推进方式存在以下几个方面的缺点:(1)火箭发动机喷射产生的羽流会污染临近卫星的光学器件,对空间光学观测任务产生比较大的影响,另外由于推进过程中产生红外线,会影响卫星在轨飞行的隐身效果。 (2)由于喷气推进是一种需要工质的推进方式,在不考虑卫星损毁情况下其工作寿命严格受到卫星所携带推进剂的影响,会影响卫星在轨飞行的寿命;
飞行管理系统介绍
飞行管理系统介绍 飞行管理系统介绍 一、飞行管理系统(FMC)组成与基本功用 (一)、飞行管理系统(FLIGHT MANAGEMENT SYS)由五个分系统组成: 1、飞行控制系统(DFCS) 包括自动驾驶(A/P)与飞行指引(F/D),其核心为两台飞行控制计算机,该系统用于自动飞行控制(FCC)与飞行指引。 2、自动油门系统(A/T) 其核心就是一台自动油门计算机与两台发动机油门操纵的伺服机构,A/T提供从起飞到着陆全飞行过程的油门控制。 3、飞行管理计算机系统(FMCS) 其核心就是一台飞行管理计算机FMC与两台控制显示组件CDU,它用于从起飞到进近的几乎全部飞行过程的横向(LATERAL)剖面与纵向(VERTICAL)剖面的飞行管理。 我部的34N型飞机装有两部FMCS,这使飞行管理系统的可靠性更高。 4、惯性基准系统(IRUS) 其核心为两台惯导基准组件IRU,其主要功用为提供飞机的姿态基准与定位参数,也可用于飞机自备、远距导航。 5、电子飞行仪表系统(EFIS) 33A与34N型飞机装备的就是电子飞行仪表系统,3T0型飞机装备的还就是旧式的机械式仪表。由于飞行仪表的电子化,逐渐淘汰老式的机械式仪表,而电子飞行仪表必须有相应的字符,符号等图形信号发生器,以提供阴极射线管CRT或液晶LCD显示。EFIS就就是起这个作用的电子式飞行仪表显示系统,它主要包括两台符号发生器(EFIS SG)与两套姿态指引仪(EADI)、两套水平状态指示器(EHSI)。
飞行管理系统介绍
飞行管理系统介绍 (二)、飞行管理系统的基本作用: 这套系统技术先进,设备量大,承担的任务多,其中最根本的功用就是: 1、实现飞行的自动化,大大减轻了飞行员的工作负担,减少人为操作所不可避免的差错与失误。 2、实现飞行全程的优化: (1)起飞阶段(TO)—根据飞机的全重与环境温度提供最佳目标推力。 (2)爬升降段(CLB)—提供最佳爬升剖面:包括爬升点,阶段爬升的设置,目标推力与目标空速的设定。 (3)巡航(CRZ)—提供最佳高度与巡航速度,以及大圆航线与导航系统的选择与自动调谐。 (4)下降阶段(DSE)—提供下降顶点,目标下降速度与分段,以充分利用飞机高度下降所得到的动能,并以最佳的高度,速度与距离转入进近阶段。 (5)进近(APP)—确定飞机在五边进近基准点时的高度、空速与距离。 飞行的优化不仅得到最合理的飞行路径,节省燃油与飞行时间,而且飞机机体的损耗率最少。 3、实现自动着陆 由于有两套自动驾驶通道,具有余度通道,借助仪表着陆系统可实现Ⅱ类气象标准的自动着陆(决断高度50英尺,跑道能见距离700英尺)与自动复飞。 二、FMC控制飞行过程工作概述 飞行过程可归纳为正常程序与辅助正常程序 1、正常程序 所谓正常程序就就是自动飞行的标准程序,可分为如下七个飞行阶段: (1)起飞TAKE OFF 在完成起飞前准备后,只要按压TO/GA开关,即开始起飞程序,此时推力杆自动前进到起飞目标N1值,当飞机滑跑达到60节时,F/D指令杆提供俯仰指令,起飞后400英尺RA高度以上,A/P衔接,同时选择L NA V(水平导航)与V
飞行器系统概论
Whyflight vehicles fly in the air Today we can see many flight vehicles fly in the air,airplanes,missiles,balloons,airships and so on.They have different uses .For example,airplanes are used to load people while missiles are used to attack the target. But,here we have a question:why can they fly in the air? First,a flight vehicle has its own flight principles.The flight vehicle need forces to make it fly. The most important of all is aerodynamics.Aerodynamics are produced by the nearby air of a flying vehicle. Aerodynamics can be divided into three forces in three directions. They are lift to overcome the gravity, drag to block the flight vehicle and lateral force to make the flight vehicle slope.And of course, the flight vehicle has thrust itself, and this is the main force to make it forward. All these forces acted on the fight vehicle keep it balance in the air, so the flight vehicle can move smoothly. Another important action to the flight is moment. There are aerodynamic moments and thrust moment. Aerodynamic moments are also divided into three components named rolling moment, yawing moment, and pitching moment. Rolling moment makes the flight vehicle roll around its longitudinal axis. Yawing moment lets the flight vehicle roll around its vertical axis. Pitching moment makes the flight vehicle roll around its lateral axis. Thrust moments are produced by thrust when it does not pass through the mass center. All
中心原子杂化轨道类型的判断方法
中心原子杂化轨道类型的判断方法 高中化学选修模块《物质结构与性质》中介绍了杂化轨道理论,这一重要理论能解释大多数分子几何构型及价键结构。在使用该理论时,首先必须确定中心原子的杂化形式,在未知分子构型的情况下,判断中心原子杂化轨道类型有时比较困难,成为教学难点。下面总结几种高中阶段判断中心原子杂化轨道类型的方法。 一、根据分子的空间构型判断 根据杂化轨道理论,中心原子轨道采取一定的杂化方式后,其空间构型和键角如下: 由此,可以根据分子的空间构型或键角来判断中心原子轨道的杂化方式。 例如:学生对于一些常见的简单分子的结构都是熟悉的,C2H2、CO2为直线型分子,键角为 180°,推断其 C 原子的杂化轨道类型为 sp;C2H4、C6H6为平面型分子,键角为 120°,推断其 C原子的杂化轨道类型为 sp2;CH4、CCl4为正四面体,键角109.5°,推断其C原子的杂化轨道类型为 sp3。 还可以扩展到以共价键形成的晶体,如:已知金刚石中的碳原子、晶体硅和石英中的硅原子,都是以正四面体结构形成共价键的,所以也都是采用 sp3杂化;已知石墨的二维结构平面内,每个碳原子与其它三个碳原子结合,形成六元环层,键角为 120°,由此判断石墨的碳原子采用 sp2杂化。 二、根据价层电子对互斥理论判断 教材的“拓展视野”中介绍了价层电子对互斥理论,根据该理论能够比较容易而准确地判断 ABm型共价分子或离子的空间构型和中心原子杂化轨道类型。中心原子的价电子对数与价电子对的几何分布、中心原子杂化轨道类型的对应关系如下表(价电子对数>4的,高中阶段不作要求)。 运用该理论的关键是能准确计算出中心原子的价电子对数,其计算方法是: 1、n=[中心原子(A)的价电子数+配位原子(B)提供的价电子数×m]÷2。 2、对于主族元素,中心原子(A)的价电子数=最外层电子数;配位原子中卤族原子、氢原子提供 1个价电子,氧族元素的原子按不提供电子计算;离子在计算价电子对数时,还应加上负离子的电荷数或减去正离子的电
飞行管理系统
第16章飞行管理系统 16、1飞行管理系统概述 随着飞机性能得不断提高,要求飞行控制系统实现得功能越来越多,系统变得越来越复杂,从而迫使系统系统设计师们在可用得技术条件、任务与用户要求,飞机可用空间与动力,飞机得气动力特性及规范要求等诸因素得限制下,把许多分系统综合起来,实施有效得统一控制与管理。于就是便出现了新一代数字化、智能化、综合化得电子系统-飞行管理系统(FMSFlight Management System)。在1981年12月,飞行管理系统首次安装在B767型飞机上。此后生产得大中型飞机广泛采用飞行管理系统。 16、2飞行管理系统得组成与功能 16、2、1飞行管理系统得组成 飞行管理系统由几个独立得系统组成。典型得飞行管理系统一般由四个分系统组成,如图161,包括: (1)处理分系统-飞行管理计算机系统(FMCS),就是整个系统得核心; (2)执行分系统-自动飞行指引系统与自动油门,见自动飞行控制系统; (3)显示分系统-电子飞行仪表系统(EFIS),见仪表系统; (4)传感器分系统-惯性基准系统(IRS)、数字大气数据计算机(DADC)与无线电导航设备。 驾驶舱主要控制组件就是自动飞行指引系统得方式控制面板(AFDS MCP)、两部控制显示组件(CDU)、两部电子飞行仪表系统(EFIS)控制面板。主要显示装置就是CDU、电子姿态指引仪(EADI)、电子水平状态指示器(EHSI)与推力方式显示。各部分都就是一个独立得系统,既可以单独使用,又可以有多种组合形式。飞行管理系统一词得概念就是将这些独立得部分组成一个综合系统,它可提供连续得自动导航、指引与性能管理。
数据库系统概论总结
数据库系统概论复习总结 第一章绪论 一、基本概念 (1)数据:描述事物的符号记录称为数据。数据的种类有数字、文字、图形、图像、声音等。数据与其语义是不可分的。(2)数据库:数据库是长期储存在计算机内的、有组织的、可共享的数据集合。 (3)数据库管理系统:DBMS是位于用户与操作系统之间的一层数据管理软件,用于科学地组织和存储数据、高效地获取数据和维护数据。DBMS的主要功能:数据定义功能、数据操纵功能、数据库的运行管理功能、数据库的建立和维护功能。 (4)数据库系统:数据库系统是指在计算机系统中引入数据库后的系统构成,一般由数据库、数据库管理系统(及其开发工具)、应用系统、数据库管理员构成。 (5)数据库系统的特点:数据结构化;数据共享性高,冗余度低,易扩充;数据独立性高 二、数据管理技术的发展过程 1.数据库管理技术发展的三个阶段:人工管理阶段、文件管理阶段和数据库系统阶段. 2.文件系统与数据库系统区别和联系: a.数据库系统实现整体数据的结构化,这是数据库的主要特征之 一,也是数据库系统与文件系统的本质区别。 b.数据库系统存储数据的方式灵活,可以存储数据库中的某一个 数据项,一组数据项,一组记录或一个纪录,而文件系统中数据的存取单位是记录。 c.数据库系统的数据共享性高,易扩充;而文件系统中的文件是为 某一特定的应用服务的,系统也不宜扩充。 三、数据模型 1. 定义:数据模型也是一种模型,它是对现实世界的一种抽象。 也就是说,数据模型是用来描述数据、组织数据和对数据进行操作的。 2.组成三要素:数据结构、数据操作和完整性约束。 (1)数据结构:是所研究的对象类型的集合,是对系统静态特性的描述。 (2)数据操作:是指对数据库中各种对象(型)的实例(值)允许进行的操作集合,包括操作及有关的操作规则,是对系统动态特性的描述。 (3)数据的约束条件:是一组完整性规则的集合。完整性规则是给定的数据模型中数据及其联系所具有的制约和依存规则,用以限定符合数据模型的数据库状态以及状态的变化,以保证数据的正确、有效、相容。 3.概念模式中常见术语: (1)实体(Entity):指客观存在并可相互区别的事物。比如学生、学生的一次选课、学生与系的关系等。 (2)实体型(Entity type):指用实体名及其属性集合来抽象和刻画同类实体。如部门(部门号、部门名称)就是一个实体型。(3)实体集(Entity set):指同类实体的集合。如全体部门就是一个实体集。(4)属性(Attribute):指实体所具有的某一特性。若干属性可以刻画一个实体,例如部门实体可以由部门号、部门名称等属性组成。(5)码(Key):指唯一标识实体的属性集。比如部门号是部门实体的码。 (6)域(Domain):指某一属性的取值范围。如部门名称的域为字符串集合。 (7)实体—联系图(E-R):是一种用来在数据库设计过程中彼时数据库系统结构的方法,是一种可视化图形方法。 (8)联系(Relationship):反映为实体(型)内部的联系和实体(型)之间的联系。 两个实体型之间的联系分为三类: (1)一对一(1:1);(2)一对多(1:n);(3)多对多(m:n) 4.概念模型的表示方法(实体-联系方法) 数据库的总体概念结构可以用E-R模型中的E-R图来表示。E-R图由以下基本元素构成: (1)矩形:代表实体集;(2)椭圆:代表属性;(3)菱形:代表实体间的联系集; (4)线段:将属性与实体集相连或将实体集与联系集相连。除线段以外,每个元素上都标有它所代表的实体、属性或联系。 5.常用的数据库模型:层次、网状、关系模型 层次模型与网状模型的优缺点: 层次数据模型的优点是:1.层次数据结构比较简单清晰。2.层次数据库的查询效率高。3.层次数据模型提供了良好的完整性支持。缺点主要有:1.现实世界中很多联系是非层次性的,如结点之间具有多对多联系。2.一个结点具有多个双亲等,层次模型表示这类联系的方法很笨拙,只能通过引入冗余数据或创建非自然的数据结构来解决。对插入和删除操作的限制比较多,因此应用程序的编写比较复杂。3.查询子女结点必须通过双亲结点。4.由于结构严密,层次命令趋于程序化。可见用层次模型对具有一对多的层次联系的部门描述非常自然,直观容易理解,这是层次数据库的突出优点。 网状模型的优点主要有:1.能够更为直接地描述现实世界,如一个结点可以有多个双亲。结点之间可以有多种上联第。2.具有良好的性能,存取效率较高。 缺点主要有:1.结构比较复杂,而且随着应用环境的扩大,数据库的结构就变得越来越复杂,不利于最终用户掌握。2.网状模型的DDL,DML复杂,并且要嵌入某一种高级语言中,用户不容易掌握,不容易使用。 6 四、数据库系统结构 1.数据库系统的三级模式结构:外模式、模式和内模式。 模式也称逻辑模式,是数据库中全体数据的逻辑结构和牲的描述,是所有用户的公共数据视图。 外模式也称子模式或用户模式,它是数据库用户能够看见和使用的局部数据的逻辑结构和特征的描述,是数据库用户的数据视图是与某一应用有关的数据的逻辑表示。 内模式也称存储模式,是一个数据库只有一个内模式。它是数据物理结构和存储方式的描述,是数据在数据库内部的表示方式。 2.三级模式之间的二级映像:外模式/模式映像、模式/模式映像. 3.数据库管理系统的主要功能有(1)数据库定义功能;(2)数据组织、
相关文档
- 电磁航天器编队飞行系统概述.
- 基于有向图的航天器编队鲁棒自适应姿态协同跟踪控制
- 航天器编队相对运动Hamilton力学建模与求解研究
- 基于代数图论的多航天器编队协同控制方法研究
- 第八章航天器相对运动
- 多航天器输出反馈姿态协同控制
- 卫星编队
- 航天器电磁编队动力学与控制研究
- 基于界栅的日地平动点编队飞行碰撞规避控制研究
- 航天器动力学03-轨道要素_684006699
- 一种基于一致性理论的航天器编队飞行协同控制方法
- 编队航天器多脉冲机动协同控制仿真
- 电磁航天器编队飞行系统 概述
- 航天器编队飞行沿航迹漂移的时间最优气动控制
- 基于有向图的航天器编队鲁棒自适应姿态协同跟踪控制_张海博
- 电动太阳风帆地球同步日心悬浮轨道编队控制研究
- Halo轨道的航天器编队构型设计