APM中文参数表for ArduCopter固件
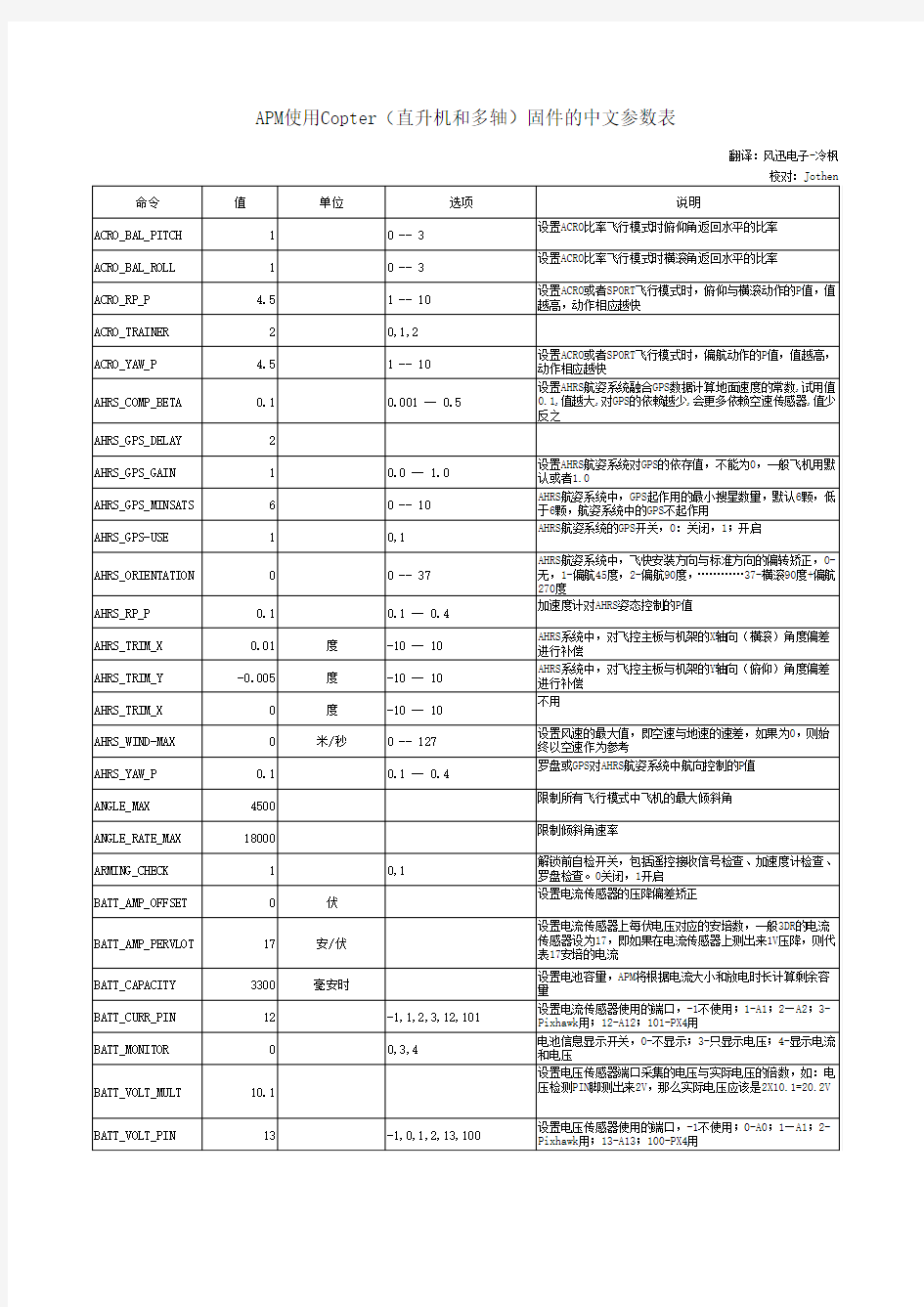

APM使用Copter(直升机和多轴)固件的中文参数表
翻译:风迅电子-冷枫
校对:Jothen 命令值单位选项说明
ACRO_BAL_PITCH10 -- 3
设置ACRO比率飞行模式时俯仰角返回水平的比率
ACRO_BAL_ROLL10 -- 3
设置ACRO比率飞行模式时横滚角返回水平的比率
ACRO_RP_P 4.5 1 -- 10设置ACRO或者SPORT飞行模式时,俯仰与横滚动作的P值,值越高,动作相应越快
ACRO_TRAINER20,1,2
ACRO_YAW_P 4.5 1 -- 10设置ACRO或者SPORT飞行模式时,偏航动作的P值,值越高,动作相应越快
AHRS_COMP_BETA0.10.001 -- 0.5设置AHRS航姿系统融合GPS数据计算地面速度的常数,试用值0.1,值越大,对GPS的依赖越少,会更多依赖空速传感器,值少反之
AHRS_GPS_DELAY2
AHRS_GPS_GAIN10.0 -- 1.0设置AHRS航姿系统对GPS的依存值,不能为0,一般飞机用默认或者1.0
AHRS_GPS_MINSATS60 -- 10AHRS航姿系统中,GPS起作用的最小搜星数量,默认6颗,低于6颗,航姿系统中的GPS不起作用
AHRS_GPS-USE10,1
AHRS航姿系统的GPS开关,0:关闭,1;开启
AHRS_ORIENTATION00 -- 37AHRS航姿系统中,飞快安装方向与标准方向的偏转矫正,0-无,1-偏航45度,2-偏航90度,…………37-横滚90度+偏航270度
AHRS_RP_P0.10.1 -- 0.4
加速度计对AHRS姿态控制的P值
AHRS_TRIM_X0.01度-10 -- 10AHRS系统中,对飞控主板与机架的X轴向(横滚)角度偏差进行补偿
AHRS_TRIM_Y-0.005度-10 -- 10AHRS系统中,对飞控主板与机架的Y轴向(俯仰)角度偏差进行补偿
AHRS_TRIM_X0度-10 -- 10
不用
AHRS_WIND-MAX0米/秒0 -- 127设置风速的最大值,即空速与地速的速差,如果为0,则始终以空速作为参考
AHRS_YAW_P0.10.1 -- 0.4
罗盘或GPS对AHRS航姿系统中航向控制的P值ANGLE_MAX4500
限制所有飞行模式中飞机的最大倾斜角ANGLE_RATE_MAX18000
限制倾斜角速率
ARMING_CHECK10,1解锁前自检开关,包括遥控接收信号检查、加速度计检查、罗盘检查。0关闭,1开启
BATT_AMP_OFFSET0伏
设置电流传感器的压降偏差矫正
BATT_AMP_PERVLOT17安/伏设置电流传感器上每伏电压对应的安培数,一般3DR的电流传感器设为17,即如果在电流传感器上测出来1V压降,则代表17安培的电流
BATT_CAPACITY3300毫安时设置电池容量,APM将根据电流大小和放电时长计算剩余容量
BATT_CURR_PIN12-1,1,2,3,12,101设置电流传感器使用的端口,-1不使用;1-A1;2—A2;3-Pixhawk用;12-A12;101-PX4用
BATT_MONITOR00,3,4电池信息显示开关,0-不显示;3-只显示电压;4-显示电流和电压
BATT_VOLT_MULT10.1设置电压传感器端口采集的电压与实际电压的倍数,如:电压检测PIN脚测出来2V,那么实际电压应该是2X10.1=20.2V
BATT_VOLT_PIN13-1,0,1,2,13,100设置电压传感器使用的端口,-1不使用;0-A0;1—A1;2-Pixhawk用;13-A13;100-PX4用
CAM_DURATION100 -- 50
增稳云台的快门时间设置,10等于1秒,50等于5秒CAM_SERVO_OFF11001000 -- 2000
快门舵机抬起时的舵机信号值
CAM_SERVO_ON13001000 -- 2000
快门舵机按下时的舵机信号值
CAM_TRIGG_DIST0米0 -- 1000快门触发设置,如果不为零将根据GPS的移动距离进行拍照,例如:设置5米,那么将根据GPS定位信息,每飞行5秒就按一次快门
CAM_TRIGG_TYPE00,1
快门触发类型设置,0-舵机,1-继电器
CH7_OPT0通道7操作设置(PWM值1800以上),0:无, 2:Flip, 3:简单模式, 4:返航, 5:Save Trim, 7:Save WP, 8:Multi Mode, 9:Camera Trigger, 10:开声纳, 11:Fence,
12:ResetToArmedYaw, 13:Super Simple Mode, 14:Acro Trainer, 16:自动, 17:自动调参
CH8_OPT0通道7操作设置(PWM值1800以上),0:无, 2:Flip, 3:简单模式, 4:返航, 5:Save Trim, 7:Save WP, 8:Multi Mode, 9:Camera Trigger, 10:开声纳, 11:Fence,
12:ResetToArmedYaw, 13:Super Simple Mode, 14:Acro Trainer, 16:自动, 17:自动调参
CIRCLE_RADIUS10米 1 -- 127
circle绕圈模式时的绕圈半径CIRCLE_RATE20度/秒-90 -- 90
circle绕圈模式时的绕圈角速度COMPASS-AUTODEC10,1
自动磁偏角开关,0关闭,1开启
COMPASS_DEC-0.083度磁偏角设置,请根据本地磁偏角输入,具体可登入https://www.sodocs.net/doc/5018065603.html,/查询
COMPASS_EXTERNAL10,1
罗盘选择,0-内置罗盘,1-外置罗盘COMPASS_LEARN00,1
启动或关闭罗盘的自学习偏移量
COMPASS_MOT_X0-1000 -- 1000对油门值进行偏移并融合到罗盘的X轴上,用来抵消大油门时电机导线磁场对罗盘X轴的干扰,需开启COMPASS_MOTCT
COMPASS_MOT_Y0-1000 -- 1000对油门值进行偏移并融合到罗盘的Y轴上,用来抵消大油门时电机导线磁场对罗盘Y轴的干扰,需开启COMPASS_MOTCT
COMPASS_MOT_Z0-1000 -- 1000对油门值进行偏移并融合到罗盘的Z轴上,用来抵消大油门时电机导线磁场对罗盘Z轴的干扰,需开启COMPASS_MOTCT,一般罗盘的方向以Z轴作为参考,设置Z轴偏移即可
COMPASS_MOTCT00,1,2设置电机对罗盘干扰的参考系,0-不使用,1-以油门值为参考,2-以电流传感器的电流值为参考
COMPASS_OFS_X-400 -- 400
对罗盘X轴与机架的安装偏差进行矫正COMPASS_OFS_Y-400 -- 400
对罗盘Y轴与机架的安装偏差进行矫正COMPASS_OFS_Z-400 -- 400
对罗盘Z轴与机架的安装偏差进行矫正
COMPASS_ORIENT0 -- 37设置罗盘的安装方式即角度,
0:None,1:Yaw45,2:Yaw90,3:Yaw135,4:Yaw180,5:Yaw225,6: Yaw270,7:Yaw315,8:Roll180,9:Roll180Yaw45,10:Roll180Y aw90,11:Roll180Yaw135,12:Pitch180,13:Roll180Yaw225,1 4:Roll180Yaw270,15:Roll180Yaw315,16:Roll90,17:Roll90 Yaw45,18:Roll90Yaw90,19:Roll90Yaw135,20:Roll270,21:R oll270Yaw45,22:Roll270Yaw90,23:Roll270Yaw136,24:Pitc h90,25:Pitch270,26:Pitch180Yaw90,27:Pitch180Yaw270,2 8:Roll90Pitch90,29:Roll180Pitch90,30:Roll270Pitch90, 31:Roll90Pitch180,32:Roll270Pitch180,33:Roll90Pitch2 70,34:Roll180Pitch270,35:Roll270Pitch270,36:Roll90Pi tch180Yaw90,37:Roll90Yaw270
COMPASS_USE0, 1
罗盘开关,0-不使用,1-使用
ESC00,1电调校准开关,0-正常开启,1-开启电调校准,开启后APM 上电后油门通道与输出直通,可以同时校准所有电调,不建议手动开启此参数
FENCE_ACTION10,1
设置突破围栏后的操作,0-只报告,1-返航或着陆FENCE_ALT_MAX100米10 -- 1000
设置围栏的最大飞行高度
FENCE_ENABLE00,1
围栏开关,0-关闭,1-开启
FENCE_MARGIN2米 1 -- 10
设置飞行器与围栏边界的安全距离
FENCE_RADIUS150米30 -- 10000
设置圆形围栏的半径
FENCE_TYPE30,1,2,3
设置围栏类型,0-无;1-限高,2:圆形,3:限高+圆形FLOW_ENABLE0
光流开关,0-不启用,1-开启
FLTMODE10飞行模式一设置(当五通道PWM<1230时),0:自稳,1:比率,2:定高,3:自动,4:指导,5:悬停,6:返航,7:绕圈,8:定点,9:着陆,10:OF_Loiter,11:ToyA,12:ToyM,13:Sport
FLTMODE20飞行模式二设置(当五通道PWM=1231-1360时),0:自稳,1:比率,2:定高,3:自动,4:指导,5:悬停,6:返航,7:绕圈,8:定点,9:着陆, 10:OF_Loiter,11:ToyA,12:ToyM,13:Sport
FLTMODE30飞行模式三设置(当五通道PWM=1361-1490时),0:自稳,1:比率,2:定高,3:自动,4:指导,5:悬停,6:返航,7:绕圈,8:定点,9:着陆, 10:OF_Loiter,11:ToyA,12:ToyM,13:Sport
FLTMODE40飞行模式四设置(当五通道PWM=1491-1620时),0:自稳,1:比率,2:定高,3:自动,4:指导,5:悬停,6:返航,7:绕圈,8:定点,9:着陆, 10:OF_Loiter,11:ToyA,12:ToyM,13:Sport
FLTMODE50飞行模式五设置(当五通道PWM=1621-1749时), 0:自稳,1:比率,2:定高,3:自动,4:指导,5:悬停,6:返航,7:绕圈,8:定点,9:着陆,
10:OF_Loiter,11:ToyA,12:ToyM,13:Sport
FLTMODE60飞行模式六设置(当五通道PWM>1750时),0:自稳,1:比率,2:定高,3:自动,4:指导,5:悬停,6:返航,7:绕圈,8:定点,9:着陆,10:OF_Loiter,11:ToyA,12:ToyM,13:Sport
FRAME1
机架类型设置,0-十字模式;1-X模式;2-V型;3-H型FS_BATT_ENABLE00:不开启,1:开启设置当电池电压过低时是否开启故障保护
FS_BATT_MAH0mAh 设置电池剩余容量保护,0为不开启,非0为当电池容量低于设定值后开启返航模式
FS_BATT_VOLTAGE10.5伏设置电池电压保护,0为不开启,非0为当电池电压低于设定值后开启返航模式
FS_GCS_ENABLE00:不开启,1:执行返航,2:
继续执行任务规划中的任
务
设置与地面站失去通信5秒后执行的动作
FS_GPS_ENABLE10:不开启,1:开启设置当GPS信号丢失时是否开启失控保护
FS_THR_ENABLE00:不开启,1:执行返航,2:
继续执行任务规划中的任
务,3:着陆
设置当油门信号低于预设值是否开启失控保护
FS_THR_VALUE975ms925 1100预设开启油门失控保护的PWM值GND_ABS_PRESS101708.7地面大气压矫正
GND_ALT_OFFSET0米-128 127矫正气压计的高度值,当气压计启动后最先读出来的气压值将被设为0高度,设置此值可对这个高度进行偏移
GND_TEMP15.28128地面温度预设
GPS_HDOP_GOOD200100 900解锁前GPS水平精度因子检查GPSGLITCH_ACCEL1000cm/s/s0 2000GPS允许的最大漂移加速度值设定GPSGLITCH_ENABLE10:Disabled,1:Enabled设置是否开启GPS故障保护
GPSGLITCH_RADIUS200cm0 5000GPS定位信息不刷新的半径,此范围内的GPS定位信息不更新到系统内的定位控制
HLD_LAT_I00.000 0.100Loiter模式下的纬度方向I值设定
HLD_LAT_IMAX0cm/s0 3000Loiter模式下纬度方向速度限制
HLD_LAT_P10.500 2.000Loiter模式下的纬度方向P值设定
HLD_LON_I00.000 0.100Loiter模式下的经度方向I值设定
HLD_LON_IMAX0cm/s0 3000Loiter模式下的经度方向速度限制
HLD_LON_P10.500 2.000Loiter模式下的经度方向P值设定
INAV_TC_XY 2.50 10XY轴上GPS与水平加速度计的融合常数
INAV_TC_Z50 10Z轴上气压计与垂直加速度计的融合常数
INS_ACCOFFS_X-0.081727m/s/s-300 300加速度计的X轴矫正值,通过加速度校准生成INS_ACCOFFS_Y0.2926252m/s/s-300 300加速度计的Y轴矫正值,通过加速度校准生成INS_ACCOFFS_Z0.2755913m/s/s-300 300加速度计的Z轴矫正值,通过加速度校准生成INS_ACCSCAL_X0.99793610.8 1.2加速度计的X轴换算系数,通过加速度校准生成INS_ACCSCAL_Y0.99897440.8 1.2加速度计的Y轴换算系数,通过加速度校准生成INS_ACCSCAL_Z0.98042730.8 1.2加速度计的Z轴换算系数,通过加速度校准生成INS_GYROFFS_X0.0129489rad/s陀螺仪的X轴矫正值
INS_GYROFFS_Y-0.01529681rad/s陀螺仪的Y轴矫正值
INS_GYROFFS_Z0.004316745rad/s陀螺仪的Z轴矫正值
INS_MPU6K_FILTER0Hz 0:Default,5:5Hz,10:10Hz
,20:20Hz,42:42Hz,98:98H
z
设置MPU6000的低通滤波器
INS_PRODUCT_ID88Which type of IMU is installed (read-only) LAND_SPEED50cm/s20 200设置着陆速度
LED_MODE90:Disabled,1:Enable,3:G
PS
On,4:Aux,9:Buzzer,17:Os
cillate,33:Nav
Blink,65:GPS Nav Blink
配置LED的工作模式
LOG_BITMASK8300:Disabled,830:Default,
958:Default+IMU,1854:De
fault+Motors,17214:Defa
ult+INav
2字节日志种类
LOITER_LAT_D00.0 0.6Loiter模式下的纬度方向速度D值设定,用来补偿理论速度与实际速度变化的差异
LOITER_LAT_I0.50.02 1.00Loiter模式下的纬度方向速度I值设定,修正理论速度与实际速度的误差
LOITER_LAT_IMAX400Centi-Degrees0 4500限制Loiter模式下纬度方向定点调整的最大倾斜角度
LOITER_LAT_P10.1 6.0Loiter模式下的纬度方向速度P值设定,计算理论速度与实际速度差异的调整比例
LOITER_LON_D00.0 0.6Loiter模式下的经度方向速度D值设定,用来补偿理论速度与实际速度变化的差异
LOITER_LON_I0.50.02 1.00Loiter模式下的经度方向速度I值设定,修正理论速度与实际速度的误差
LOITER_LON_IMAX400Centi-Degrees0 4500限制Loiter模式下经度方向定点调整的最大倾斜角度
LOITER_LON_P10.1 6.0Loiter模式下的经度方向速度P值设定,计算理论速度与实际速度差异的调整比例
MAG_ENABLE10:不使用,1:使用指南针开关,
MNT_ANGMAX_PAN4500度分-18000 17999目标飞行时的最大偏航角设定MNT_ANGMAX_ROL4500度分-18000 17999目标飞行时的最大横滚角设定MNT_ANGMAX_TIL4500度分-18000 17999目标飞行时的最大俯仰角设定MNT_ANGMIN_PAN-4500度分-18000 17999目标飞行时的最小偏航角设定MNT_ANGMIN_ROL-4500度分-18000 17999目标飞行时的最小横滚角设定MNT_ANGMIN_TIL-4500度分-18000 17999目标飞行时的最小俯仰角设定
MNT_CONTROL_X0度分-18000 17999使用MavLink协议或遥控进行目标飞行时的横滚载入角预设
MNT_CONTROL_Y0度分-18000 17999使用MavLink协议或遥控进行目标飞行时的俯仰载入角预设
MNT_CONTROL_Z0度分-18000 17999使用MavLink协议或遥控进行目标飞行时的偏航载入角预设
MNT_JSTICK_SPD00 1000 for position control, small for low speeds, 100 for max speed. A good general value is 10 which gives a movement speed of3degrees per
MNT_MODE00:retract,1:neutral,2:M
avLink_targeting,3:RC_t Camera or antenna mount operation mode
MNT_NEUTRAL_X0Centi-Degrees argeting4:GPS point
-18000 17999Mount roll angle when in neutral position
MNT_NEUTRAL_Y0Centi-Degrees-18000 17999Mount tilt/pitch angle when in neutral position MNT_NEUTRAL_Z0Centi-Degrees-18000 17999Mount pan/yaw angle when in neutral position
MNT_RC_IN_PAN00:Disabled,5:RC5,6:RC6,
7:RC7,8:RC8
0 for none, any other for the RC channel to be
used to control pan (yaw) movements
MNT_RC_IN_ROLL00:Disabled,5:RC5,6:RC6,
7:RC7,8:RC8
0 for none, any other for the RC channel to be
used to control roll movements
MNT_RC_IN_TILT00:Disabled,5:RC5,6:RC6,
7:RC7,8:RC8
0 for none, any other for the RC channel to be
used to control tilt (pitch) movements
MNT_RETRACT_X0Centi-Degrees-18000 17999Mount roll angle when in retracted position
MNT_RETRACT_Y0Centi-Degrees-18000 17999Mount tilt/pitch angle when in retracted position
MNT_RETRACT_Z0Centi-Degrees-18000 17999Mount yaw/pan angle when in retracted position MNT_STAB_PAN00:Disabled,1:Enabled enable pan/yaw stabilisation relative to Earth MNT_STAB_ROLL00:Disabled,1:Enabled enable roll stabilisation relative to Earth
MNT_STAB_TILT00:Disabled,1:Enabled enable tilt/pitch stabilisation relative to Earth
MOT_SPIN_ARMED00:不启用怠速,70:最低怠
速,100:慢速,130:中
速,150:最快
怠速功能,设置解锁后的电机是否怠速运转
MOT_TCRV_ENABLE10:不开启,1:开启设置是否开启电机线性控制
MOT_TCRV_MAXPCT9320 80设置开启线性控制后,电机最大推力时的PWM位置,MOT_TCRV_MIDPCT5220 80设置开启线性控制后,电机一半推力时的PWM位置,OF_PIT_D0.120.100 0.140使用光流传感器起后,俯仰PID控制的D值
OF_PIT_I0.50.250 0.750使用光流传感器起后,俯仰PID控制的I值
OF_PIT_IMAX100Centi-Degrees0 4500使用光流传感器起后,俯仰轴的最大倾斜角
OF_PIT_P 2.5 2.000 3.000使用光流传感器起后,俯仰PID控制的P值
OF_RLL_D0.120.100 0.140使用光流传感器起后,横滚PID控制的D值
OF_RLL_I0.50.250 0.750使用光流传感器起后,横滚PID控制的I值
OF_RLL_IMAX100Centi-Degrees0 4500使用光流传感器起后,横滚轴的最大倾斜角
OF_RLL_P 2.5 2.000 3.000使用光流传感器起后,横滚PID控制的P值
PILOT_VELZ_MAX250厘米/秒10 500垂直速度限制
RATE_PIT_D0.0040.001 0.008俯仰轴PID调节的D值设定
RATE_PIT_I0.10.01 0.5俯仰轴PID调节的I值设定
RATE_PIT_IMAX500ms0 500俯仰轴调节时电机PWM变化的最大范围
RATE_PIT_P0.150.08 0.20俯仰轴PID调节的P值设定
RATE_RLL_D0.0040.001 0.008横滚轴PID调节的D值设定
RATE_RLL_I0.10.01 0.5横滚轴PID调节的I值设定
RATE_RLL_IMAX500ms0 500横滚轴调节时电机PWM变化的最大范围
RATE_RLL_P0.150.08 0.20横滚轴PID调节的P值设定
RATE_YAW_D00.000 0.001偏航轴PID调节的D值设定
RATE_YAW_I0.020.010 0.020偏航轴PID调节的I值设定
RATE_YAW_IMAX800ms0 500偏航轴调节时电机PWM变化的最大范围
RATE_YAW_P0.20.150 0.250偏航轴PID调节的P值设定
RC_SPEED490Hz50 490设置电调的刷新率
RC1_DZ30遥控通道1的信号死区
RC1_MAX2024ms800 2200遥控通道1的最大PWM值
RC1_MIN1017ms800 2200遥控通道1的最小PWM值
RC1_REV1-1:Reversed,1:Normal设置遥控通道1是否反向
RC1_TRIM1519ms800 2200设置遥控通道1的中点PWM
RC10_DZ0遥控通道10的信号死区
RC10_MAX1900ms ileron5:flaperon6:mou
800 2200遥控通道10的最大PWM值
RC10_MIN1100ms800 2200遥控通道10的最小PWM值RC10_REV1-1:Reversed,1:Normal设置遥控通道10是否反向RC10_TRIM1500ms800 2200设置遥控通道10的中点PWM RC11_DZ0遥控通道11的信号死区
RC11_FUNCTION00:Disabled,1:RCPassThru
,2:Flap,3:Flap_auto,4:A通道11功能设置
RC11_MAX1900ms ileron5:flaperon6:mou
800 2200遥控通道11的最大PWM值
RC11_MIN1100ms800 2200遥控通道11的最小PWM值RC11_REV1-1:Reversed,1:Normal设置遥控通道11是否反向RC11_TRIM1500ms800 2200设置遥控通道11的中点PWM RC2_DZ30遥控通道2的信号死区
RC2_MAX2021ms800 2200遥控通道2的最大PWM值RC2_MIN1016ms800 2200遥控通道2的最小PWM值RC2_REV1-1:Reversed,1:Normal设置遥控通道2是否反向RC2_TRIM1519ms800 2200设置遥控通道2的中点PWM RC3_DZ30遥控通道3的信号死区
RC3_MAX2022ms800 2200遥控通道3的最大PWM值RC3_MIN1006ms800 2200遥控通道3的最小PWM值RC3_REV1-1:Reversed,1:Normal设置遥控通道3是否反向RC3_TRIM1017ms800 2200设置遥控通道3的中点PWM RC4_DZ40遥控通道4的信号死区
RC4_MAX2021ms800 2200遥控通道4的最大PWM值RC4_MIN1017ms800 2200遥控通道4的最小PWM值RC4_REV1-1:Reversed,1:Normal设置遥控通道4是否反向RC4_TRIM1519ms800 2200设置遥控通道4的中点PWM RC5_DZ0遥控通道5的信号死区
RC5_FUNCTION00:Disabled,1:RCPassThru
,2:Flap,3:Flap_auto,4:A通道5功能设置
RC5_MAX2027ms ileron5:flaperon6:mou
800 2200遥控通道5的最大PWM值
RC5_MIN1016ms800 2200遥控通道5的最小PWM值RC5_REV1-1:Reversed,1:Normal设置遥控通道5是否反向RC5_TRIM1017ms800 2200设置遥控通道5的中点PWM RC6_DZ0遥控通道6的信号死区
RC6_MAX2022ms ileron5:flaperon6:mou
800 2200遥控通道6的最大PWM值
RC6_MIN1014ms800 2200遥控通道6的最小PWM值RC6_REV1-1:Reversed,1:Normal设置遥控通道6是否反向RC6_TRIM1017ms800 2200设置遥控通道6的中点PWM RC7_DZ0遥控通道7的信号死区
RC7_FUNCTION00:Disabled,1:RCPassThru
,2:Flap,3:Flap_auto,4:A通道7功能设置
RC7_MAX2023ms ileron5:flaperon6:mou
800 2200遥控通道7的最大PWM值
RC7_MIN1014ms800 2200遥控通道7的最小PWM值RC7_REV1-1:Reversed,1:Normal设置遥控通道7是否反向RC7_TRIM1016ms800 2200设置遥控通道7的中点PWM RC8_DZ0遥控通道8的信号死区
RC8_FUNCTION00:Disabled,1:RCPassThru
,2:Flap,3:Flap_auto,4:A通道8功能设置
RC8_MAX2028ms ileron5:flaperon6:mou
800 2200遥控通道8的最大PWM值
RC8_MIN1012ms800 2200遥控通道8的最小PWM值RC8_REV1-1:Reversed,1:Normal设置遥控通道8是否反向RC8_TRIM1017ms800 2200设置遥控通道8的中点PWM RCMAP_PITCH2 1 8指定俯仰轴的控制通道RCMAP_ROLL1 1 8指定横滚轴的控制通道RCMAP_THROTTLE3 1 8指定油门的控制通道RCMAP_YAW4 1 8指定偏航轴的控制通道
RELAY_PIN1313:APM2 A9 pin,47:APM1
relay,111:PX4 FMU
Relay1,112:PX4 FMU
Relay2,113:PX4IO
Relay1,114:PX4IO
Relay2,115:PX4IO
ACC1,116:PX4IO ACC2
指定继电器输出端口
RSSI_PIN-1-1:Disabled, 0:A0,
1:A1, 2:A2, 13:A13
设置用来显示信号强度的模拟输入端口,输入范围0-5V
RTL_ALT1500厘米0 8000设置进入返航模式时的爬升高度,设为0以当前高度返航
RTL_ALT_FINAL0里面-1 1000设置返航到家后的定位高度RTL_LOIT_TIME5000ms0 60000设置返航到家后的悬停时间
SCHED_DEBUG00:Disabled,2:ShowSlips,
3:ShowOverruns
Set to non-zero to enable scheduler debug
messages. When set to show "Slips" the scheduler
will display a message whenever a scheduled task
is delayed due to too much CPU load. When set to
ShowOverruns the scheduled will display a
message whenever a task takes longer than the
limit promised in the task table.
SERIAL3_BAUD571:1200,2:2400,4:4800,9:
9600,19:19200,38:38400,
57:57600,111:111100,115
串口3波特率设置
SIMPLE7简单模式的位指定SONAR_ENABLE00:关,1:开超声波开关SONAR_GAIN0.80.01 0.5超声波垂直速度增益
SONAR_TYPE00:XL-EZ0 / XL-EZ4,1:LV-
EZ0,2:XLL-EZ0,3:HRLV
超声波型号选择
SR0_EXT_STAT2
SR0_EXTRA12
SR0_EXTRA22
SR0_EXTRA32
SR0_PARAMS50
SR0_POSITION2
SR0_RAW_CTRL2
SR0_RAW_SENS2
SR0_RC_CHAN2
SR3_EXT_STAT2
SR3_EXTRA12
SR3_EXTRA22
SR3_EXTRA32
SR3_PARAMS0
SR3_POSITION2
SR3_RAW_CTRL2
SR3_RAW_SENS2
SR3_RC_CHAN2
STB_PIT_I00.000 0.100自稳模式时俯仰轴PID调节的I值
STB_PIT_IMAX0Centi-
Degrees/Sec
0 4500自稳模式时俯仰轴的最大倾斜角速度
STB_PIT_P 4.5 3.000 6.000自稳模式时俯仰轴PID调节的P值STB_RLL_I00.000 0.100自稳模式时横滚轴PID调节的I值
STB_RLL_IMAX0Centi-
Degrees/Sec
0 4500自稳模式时横滚轴的最大倾斜角速度
STB_RLL_P 4.5 3.000 6.000自稳模式时横滚轴PID调节的P值STB_YAW_I00.000 0.100自稳模式时偏航轴PID调节的I值
STB_YAW_IMAX0Centi-
Degrees/Sec
0 4500自稳模式时偏航轴的最大倾斜角速度
STB_YAW_P 4.5 3.000 6.000自稳模式时偏航轴PID调节的P值
SUPER_SIMPLE00:Disabled,1:Mode1,2:Mo
de2,3:Mode1+2,4:Mode3,5超级简单模式设置
SYSID_MYGCS
:Mode1+36:Mode2+37:Mo
255
Allows restricting radio overrides to only come
from my ground station
SYSID_SW_MREV120This value is incremented when changes are made to the eeprom format
SYSID_SW_TYPE10This is used by the ground station to recognise the software type (eg ArduPlane vs ArduCopter)
SYSID_THISMAV1Allows reconising the mavlink version TELEM_DELAY0seconds0 10数传延时
THR_ACCEL_D00.000 0.400油门加速PID调节的D值设定
THR_ACCEL_I 1.50.000 3.000油门加速PID调节的I值设定
THR_ACCEL_IMAX500ms0 500油门最大变化范围设定
THR_ACCEL_P0.750.500 1.500油门加速PID调节的P值设定
THR_ALT_I00.000 0.100油门控制定高时的PID的I值设定
THR_ALT_IMAX300cm/s0 500定高时的垂直速度限定
THR_ALT_P1 1.000 3.000油门控制定高时的PID的P值设定
THR_MAX1000ms0 1000油门给电机的最大PWM值
THR_MID500300 700The throttle output (0 ~ 1000) when throttle stick is in mid position. Used to scale the manual throttle so that the mid throttle stick position is close to the throttle required to hover
THR_MIN130ms0 300油门给电机的最小PWM值THR_RATE_D00.000 0.400油门比率调节的D值THR_RATE_I00.000 0.100油门比率调节的I值THR_RATE_IMAX300cm/s/s0 500最大油门比率
THR_RATE_P6 1.000 8.000油门比率调节的P值TRIM_THROTTLE443ms0 1000保持悬停的油门PWm值
TUNE00:None,1:Stab
Roll/Pitch kP,4:Rate
Roll/Pitch kP,5:Rate
Roll/Pitch kI,21:Rate
Controls which parameters (normally PID gains)
are being tuned with transmitter's channel 6
knob
TUNE_HIGH10000 32767The maximum value that will be applied to the parameter currently being tuned with the transmitter's channel 6 knob
TUNE_LOW00 32767The minimum value that will be applied to the parameter currently being tuned with the transmitter's channel 6 knob
WP_INDEX0The index number of the command that is currently being executed. Do not update this parameter directly!
WP_TOTAL1Total number of commands in the mission stored in the eeprom. Do not update this parameter directly!
WP_YAW_BEHAVIOR20:Never change yaw,
1:Face next waypoint,
2:Face next waypoint
except RTL, 3:Face
along GPS course
执行任务或者返航时,控制飞行方向的方式
WPNAV_ACCEL100cm/s/s0 980Defines the horizontal acceleration in cm/s/s used during missions
WPNAV_LOIT_SPEED500cm/s0 2000Defines the maximum speed in cm/s which the aircraft will travel horizontally while in loiter mode
WPNAV_RADIUS200cm100 1000Defines the distance from a waypoint, that when crossed indicates the wp has been hit.
WPNAV_SPEED500cm/s0 2000Defines the speed in cm/s which the aircraft will attempt to maintain horizontally during a WP mission
WPNAV_SPEED_DN150cm/s0 1000Defines the speed in cm/s which the aircraft
will attempt to maintain while descending during a WP mission
WPNAV_SPEED_UP250cm/s0 1000Defines the speed in cm/s which the aircraft
will attempt to maintain while climbing during a WP mission
apm飞控较为详细的入门教程
apm飞控较为详细的入门教程 最近发现很多模友在看了泡泡老师的视频有很多细节没有看懂在群上提问,为了能使刚用上apm的模友一步到位,再来一个文字教程帮助你们快速使用。在此也感谢apm2.8交流群中的冷风群主提供的教程~废话不多说了 硬件安装 1、通过USB接口供电时,如果USB数据处于连接状态,APM会切断数传接口的通讯功能,所以请不要同时使用数传和USB线连接调试APM,USB接口的优先级高于数传接口,仅有供电功能的USB线不在此限; 2、APM板载的加速度传感器受震动影响,会产生不必要的动差,直接影响飞控姿态的计算,条件允许请尽量使用一个减震平台来安装APM主板; 3、APM板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。 使用建议 对于初次使用APM自驾仪的用户来说,建议你分步骤完成APM的入门使用: 1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能; 2、仅连接USB线学会固件的下载; 3、连接接收机和USB线完成APM的遥控校准、加速度校准和罗盘校准; 4、完成各类参数的设定; 5、组装飞机,完成各类安全检查后试飞; 6、PID参数调整; 7、APM各类高阶应用 地面站调试软件Mission Planner安装 首先,MissionPlanner的安装运行需要微软的Net Framework 4.0组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0并安装 安装完NetFramework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载,下载页面中每个版本都提供了MSI版和ZIP版可供选择。MSI 为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB 线即可使用。ZIP版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的Driver文件夹中。具体使用哪个版本请自行决定,如果是第一次安装使用,建议你下载MSI版。 以安装MSI版为例(注意:安装前请不要连接APM的USB线),双击下载后的MSI文件,然后一步一步Next即可,只是安装过程中弹出设备驱动程序安装向导时,请点击下一步继续,否则会跳过驱动程序的安装(关于教程的各类文件我会在网盘里共享)
apm飞控入门教程
Apm 飞控较为详细的入门教程
最近发现很多模友在看了泡泡老师的视频有很多细节没有看懂在群上提问,为了能使刚用上apm的模友一步到位,再来一个文字教程帮助你们快速使用。在此也感谢apm2.8交流群中的冷风群主提供的教程~废话不多说了 硬件安装 1、通过USB接口供电时,如果USB数据处于连接状态,APM会切断数传接口的通讯功能,所以请不要同时使用数传和USB线连接调试APM,USB接口的优先级高于数传接口,仅有供电功能的USB线不在此限; 2、APM板载的加速度传感器受震动影响,会产生不必要的动差,直接影响飞控姿态的计算,条件允许请尽量使用一个减震平台来安装APM主板; 3、APM板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海 绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。 使用建议 对于初次使用APM自驾仪的用户来说,建议你分步骤完成APM的入门使用: 1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能; 2、仅连接USB线学会固件的下载; 3、连接接收机和USB线完成APM的遥控校准、加速度校准和罗盘校准; 4、完成各类参数的设定; 5、组装飞机,完成各类安全检查后试飞; 6、PID参数调整; 7、APM各类高阶应用 地面站调试软件Mission Planner安装 首先,MissionPlanner的安装运行需要微软的Net Framework 4.0组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0并安装 安装完NetFramework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载,下载页面中每个版本都提供了MSI版和ZIP版可供选择。MSI 为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB 线即可使用。ZIP版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的Driver文件夹中。具体使用哪个版本请自行 决定,如果是第一次安装使用,建议你下载MSI版。 以安装MSI版为例(注意:安装前请不要连接APM的USB线),双击下载后的MSI文件,然后一步一步Next即可,只是安装过程中弹出设备驱动程序安装向导时,请点击下一步继 续,否则会跳过驱动程序的安装(关于教程的各类文件我会在网盘里共享)
apm飞控较为详细的入门教程
APM飞控详细入门教程 目录 一、硬件安装 (1) 二、地面站调试软件Mission Planner安装 (1) 三、认识Misson Planner的界面 (2) 四、固件安装 (3) 五、遥控校准 (6) 六、加速度校准 (8) 七、罗盘校准 (16) 八、解锁需知(重要) (18) 九、飞行模式配置 (18) 十、失控保护 (19) 十一、命令行的使用 (20) 十二、APM飞行模式注解 (23) 十三、APM接口定义说明 (25) 十四、apm pid 调参的通俗理解 (26) 十五、arduino的编译下载最新固件 (28) 俺是收集整理的哦,原作和原文来源 https://www.sodocs.net/doc/5018065603.html,/p/2974250475?pn=1 感谢yl494706588
最近发现很多模友在看了泡泡老师的视频有很多细节没有看懂在群上提问,为了能使刚用上apm的模友一步到位,再来一个文字教程帮助你们快速使用。在此也感谢apm2.8交流群中的冷风群主提供的教程~废话不多说了 一、硬件安装 1、通过USB接口供电时,如果USB数据处于连接状态,APM会切断数传接口的通讯功能,所以请不要同时使用数传和USB线连接调试APM,USB接口的优先级高于数传接口,仅有供电功能的USB线不在此限; 2、APM板载的加速度传感器受震动影响,会产生不必要的动差,直接影响飞控姿态的计算,条件允许请尽量使用一个减震平台来安装APM主板; 3、APM板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。 使用建议 对于初次使用APM自驾仪的用户来说,建议你分步骤完成APM的入门使用: 1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能; 2、仅连接USB线学会固件的下载; 3、连接接收机和USB线完成APM的遥控校准、加速度校准和罗盘校准; 4、完成各类参数的设定; 5、组装飞机,完成各类安全检查后试飞; 6、PID参数调整; 7、APM各类高阶应用 二、地面站调试软件Mission Planner安装 首先,MissionPlanner的安装运行需要微软的Net Framework 4.0组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0并安装安装完NetFramework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载,下载页面中每个版本都提供了MSI版和ZIP版可供选择。MSI为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB线即可使用。ZIP版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的Driver文件夹中。具体使用哪个版本请自行决定,如果是第一次安装使用,建议你下载MSI版。 以安装MSI版为例(注意:安装前请不要连接APM的USB线),双击下载后的MSI文件,然后一步一步Next即可,只是安装过程中弹出设备驱动程序安装向导时,请点击下一步继续,否则会跳过驱动程序的安装(关于教程的各类文件我会在网盘里共享)
APM飞控介绍要点
APM飞控介绍要点 APM飞控系统介绍 APM飞控系统是国外的一个开源飞控系统,能够支持固定翼,直升机,3轴,4轴,6轴飞行器。在此我只介绍固定翼飞控系统。 APM飞控系统主要结构和功能 组成功能 飞控主芯片 Atmega1280/2560 主控芯片 PPM解码芯片 Atmega168/328 负责监视模式通道的 pwm信号监测,以便在手 动模式和其他模式之间 进行切换。提高系统安全惯性测量单元双轴陀螺,单轴陀螺,三测量三轴角速度,三轴加 轴加速度计速度,配合三轴磁力计或 gps测得方向数据进行校 正,实现方向余弦算法, 计算出飞机姿态。 GPS导航模块 Lea-5h或其他信号gps模测量飞机当前的经纬度, 块高度,航迹方向(track), 地速等信息。三轴磁力计模块 HMC5843/5883模块测量飞机当前的航向 (heading) 空速计 MPXV7002模块测量飞机空速(误差较 大,而且测得数据不稳 定,会导致油门一阵一阵 变化)
空压计 BMP085芯片测量空气压力,用以换 算成高度 AD芯片 ADS7844芯片将三轴陀螺仪、三轴加速 度计、双轴陀螺仪输出温 度、空速计输出的模拟电 压转换成数字量,以供后 续计算 其他模块电源芯片,usb电平转换 芯片等 飞控原理 在APM飞控系统中,采用的是两级PID控制方式,第一级是导航级,第二级是控制级,导航级的计算集中在medium_loop( ) 和fastloop( )的 update_current_flight_mode( )函数中,控制级集中在fastloop( )的 stabilize( )函数中。导航级PID控制就是要解决飞机如何以预定空速飞行在预定高度的问题,以及如何转弯飞往目标问题,通过算法给出飞机需要的俯仰角、油门和横滚角,然后交给控制级进行控制解算。控制级的任务就是依据需要的俯仰角、油门、横滚角,结合飞机当前的姿态解算出合适的舵机控制量,使飞机保持预定的俯仰角,横滚角和方向角。最后通过舵机控制级set_servos_4( )将控制量转换成具体的pwm信号量输出给舵机。值得一提的是,油门的控制量是在导航级确定的。控制级中不对油门控制量进行解算,而直接交给舵机控制级。而对于方向舵的控制,导航级并不给出方向舵量的解算,而是由控制级直接解算方向舵控制量,然后再交给舵机控制级。 以下,我剔除了APM飞控系统的细枝末节,仅仅将飞控系统的重要语句展现,只浅显易懂地说明APM飞控系统的核心工作原理。 一,如何让飞机保持预定高度和空速飞行
APM飞控源码讲解
APM飞控系统介绍 APM飞控系统是国外的一个开源飞控系统,能够支持固定翼,直升机,3轴,4轴,6轴飞行器。在此我只介绍固定翼飞控系统。 APM飞控系统主要结构和功能 组成功能 飞控主芯片Atmega1280/2560 主控芯片 PPM解码芯片Atmega168/328 负责监视模式通道的 pwm信号监测,以便在手 动模式和其他模式之间 进行切换。提高系统安全 惯性测量单元双轴陀螺,单轴陀螺,三 轴加速度计测量三轴角速度,三轴加速度,配合三轴磁力计或gps测得方向数据进行校正,实现方向余弦算法,计算出飞机姿态。 GPS导航模块Lea-5h或其他信号gps模 块测量飞机当前的经纬度,高度,航迹方向(track),地速等信息。 三轴磁力计模块HMC5843/5883模块测量飞机当前的航向 (heading) 空速计MPXV7002模块测量飞机空速(误差较 大,而且测得数据不稳 定,会导致油门一阵一阵 变化) 空压计BMP085芯片测量空气压力,用以换 算成高度 AD芯片ADS7844芯片将三轴陀螺仪、三轴加速 度计、双轴陀螺仪输出温 度、空速计输出的模拟电 压转换成数字量,以供后 续计算 其他模块电源芯片,usb电平转换 芯片等 飞控原理 在APM飞控系统中,采用的是两级PID控制方式,第一级是导航级,第二级是控制级,导航级的计算集中在medium_loop( ) 和fastloop( )的update_current_flight_mode( )函数中,控制级集中在fastloop( )的stabilize( )函数中。导航级PID控制就是要解决飞机如何以预定空速飞行在预定高度的问题,以及如何转弯飞往目标问题,通过算法给出飞机需要的俯仰角、油门和横滚角,然后交给控制级进行控 制解算。控制级的任务就是依据需要的俯仰角、油门、横滚角,结合飞机当前的姿态解
apm飞控较为详细的入门教程
apm飞控较为详细的入门教程 超详细的APM飞控介绍教程,赶紧收了,不错。 APM飞控详细入门教程 目录 一、硬件安装 (1) 二、地面站调试软件Mission Planner安装 (1) 三、认识Misson Planner的界面 (2) 四、固件安装 (3) 五、遥控校准 (6) 六、加速度校准 (8) 七、罗盘校准 (16) 八、解锁需知(重要) (18) 九、飞行模式配置 (18)
十、失控保护 (19) 十一、命令行的使用 (20) 十二、APM飞行模式注解 (23) 十三、APM接口定义说明 (25) 十四、apm pid 调参的通俗理解 (26) 十五、arduino的编译下载最新固件 (28) 俺是收集整理的哦,原作和原文来源 感谢yl494706588 最近发现很多模友在看了泡泡老师的视频有很多细节没有看懂在群上提问,为了能使刚用上apm的模友一步到位,再来一个文字教程帮助你们快速使用。在此也感谢apm2.8交流群中的冷风群主提供的教程~废话不多说了 一、硬件安装 1、通过USB接口供电时,如果USB数据处于连接状态,APM会切断数传接口的通讯功能,所以请不要同时使用数传和USB线连接调试APM,USB接口的优先级高于数传接口,仅有供电功能的USB线不在此限;
条件允许请尽量使用一个减震平台来安装APM主板; 3、APM板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。使用建议 对于初次使用APM自驾仪的用户来说,建议你分步骤完成APM的入门使用: 1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能; 2、仅连接USB线学会固件的下载; 3、连接接收机和USB线完成APM的遥控校准、加速度校准和罗盘校准; 4、完成各类参数的设定; 5、组装飞机,完成各类安全检查后试飞; 6、PID参数调整; 7、APM各类高阶应用 二、地面站调试软件Mission Planner安装 首先,MissionPlanner的安装运行需要微软的Net Framework 4.0组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0并安装安装完NetFramework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载,下载页面中每个版本都提供了MSI版和ZIP版可供选择。MSI为应用程序安装包版,安装过程中会同时安装APM 的USB驱动,安装后插上APM的USB线即可使用。ZIP版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的Driver文件夹中。
最新APM飞行模式注解
APM飞行模式注解 1、稳定模式Stabilize 稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。 2、比率控制模式Acro 这个是非稳定模式,这时apm将完全依托遥控器遥控的控制,新手慎用。 3、定高模式ALT_HOLD 定高模式(Alt Hold)是使用自动油门,试图保持目前的高度的稳定模式。定高模式时高度仍然可以通过提高或降低油门控制,但中间会有一个油门死区,油门动作幅度超过这个死区时,飞行器才会响应你的升降动作 当进入任何带有自动高度控制的模式,你目前的油门将被用来作为调整油门保持高度的基准。在进入高度保持前确保你在悬停在一个稳定的高度。飞行器将随着时间补偿不良的数值。只要它不会下跌过快,就不会有什么问题。 离开高度保持模式时请务必小心,油门位置将成为新的油门,如果不是在飞行器的中性悬停位置,将会导致飞行器迅速下降或上升。 在这种模式下你不能降落及关闭马达,因为现在是油门摇杆控制高度,而非马达。请切换到稳定模式,才可以降落和关闭马达。 4、悬停模式Loiter 悬停模式是GPS定点+气压定高模式。应该在起飞前先让GPS定点,避免在空中突然定位发生问题。其他方面跟定高模式基本相同,只是在水平方向上由GPS 进行定位。 5、简单模式Simple Mode 简单模式相当于一个无头模式,每个飞行模式的旁边都有一个Simple Mode复选框可以勾选。勾选简单模式后,飞机将解锁起飞前的机头指向恒定作为遥控器前行摇杆的指向,这种模式下无需担心飞行器的姿态,新手非常有用。 6、自动模式 AUTO 自动模式下,飞行器将按照预先设置的任务规划控制它的飞行 由于任务规划依赖GPS的定位信息,所以在解锁起飞前,必须确保GPS已经完成定位(APM板上蓝色LED常亮) 切换到自动模式有两种情况: 如果使用自动模式从地面起飞,飞行器有一个安全机制防止你误拨到自动模式时误启动发生危险,所以需要先手动解锁并手动推油门起飞。起飞后飞行器会参考
APM飞行模式解说
APM飞行模式注解 ELEV是俯仰或升降 1通道对 Pitch AILE是横滚或副翼 2通道对 Roll THRO是油门 3通道对 Throttl RUDD是方向 4通道对 Yaw 红正黑负白信号,红正棕负橙信号 Pitch 俯仰 Roll 横滚 Throttl 油门 Yaw 方向 1、稳定模式Stabilize 稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。 2、比率控制模式Acro 这个是非稳定模式,这时apm将完全依托遥控器遥控的控制,新手慎用。 3、定高模式ALT_HOLD 定高模式(Alt Hold)是使用自动油门,试图保持目前的高度的稳定模式。定高模式时高度仍然可以通过提高或降低油门控制,但中间会有一个油门死区,油门动作幅度超过这个死区时,飞行器才会响应你的升降动作 当进入任何带有自动高度控制的模式,你目前的油门将被用来作为调整油门保持高度的基准。在进入高度保持前确保你在悬停在一个稳定的高度。飞行器将随着时间补偿不良的数值。只要它不会下跌过快,就不会有什么问题。 离开高度保持模式时请务必小心,油门位置将成为新的油门,如果不是在飞行器的中性悬停位置,将会导致飞行器迅速下降或上升。 在这种模式下你不能降落及关闭马达,因为现在是油门摇杆控制高度,而非马达。请切换到稳定模式,才可以降落和关闭马达。 4、自动模式 AUTO 自动模式下,飞行器将按照预先设置的任务规划控制它的飞行 由于任务规划依赖GPS的定位信息,所以在解锁起飞前,必须确保GPS已经完成定位(APM 板上蓝色LED常亮) 切换到自动模式有两种情况: 如果使用自动模式从地面起飞,飞行器有一个安全机制防止你误拨到自动模式时误启动发生危险,所以需要先手动解锁并手动推油门起飞。起飞后飞行器会参考你最近一次ALT Hold 定高的油门值作为油门基准,当爬升到任务规划的第一个目标高度后,开始执行任务规划飞向目标; 如果是空中切换到自动模式,飞行器首先会爬升到第一目标的高度然后开始执行任务 6、悬停模式Loiter
Pixhawk飞控设置飞行模式教程及LED灯意义
飞行模式中文意思: 0:Stabilize自稳,1:Acro特技,2:AltHold定高,3:Auto自动,4:Guided引导,5:Loiter留待(常叫悬停),6:RTL返航,7:Circle绕圈,9:Land降 落,11:Drift飘移,13:Sport运动,14:Flip翻转,15:AutoTune自动调 参,16:PosHold定点,17:Brake暂停 M:Copter中有14种飞行模式可供选择,有10种是常用的。你可以按照下列流程进行设定: 1.打开你的遥控发射机 2·连接APM/PX4至Mission Planner 3·进入Initial Setup(初始设置)> Mandatory Hardware(必备硬件)> Flight Modes(飞行模式)界面 ·注意下,切换发射机的飞行模式开关(通道5),绿色高光就会移动到不同的位置。 ·使用每行的下拉菜单选择飞行模式应用到这个开关位置上,确保至少有一个开关位置是给自稳的。 ·而且可以为这个开关位置选中简单模式复选框。如果使用的是AC3.1或更新版本,你也可以设为超简单模式。如果简单模式和超简单模式同时被选中,那么会使用超简单模式。建议第一次使用不要打开简单模式或者超简单模式,设置不好飞机会自旋! ·当完成时点击“保存模式”按钮。
飞行模式注解 1、稳定模式Stabilize 稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应 该使用此模式。此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行 的首选,也是FPV第一视角飞行的最佳模式。一定要确保遥控器上的开关能很 方便无误地拨到该模式,应急时会非常重要。 2、比率控制模式Acro 这个是非稳定模式,这时apm将完全依托遥控器遥控的控制,新手慎用。 3、定高模式ALT_HOLD 定高模式(AltHold)是使用自动油门,试图保持目前的高度的稳定模式。定高 模式时高度仍然可以通过提高或降低油门控制,但中间会有一个油门死区,油 门动作幅度超过这个死区时,飞行器才会响应你的升降动作当进入任何带有自 动高度控制的模式,你目前的油门将被用来作为调整油门保持高度的基准。在 进入高度保持前确保你在悬停在一个稳定的高度。飞行器将随着时间补偿不良 的数值。只要它不会下跌过快,就不会有什么问题。离开高度保持模式时请务 必小心,油门位置将成为新的油门,如果不是在飞行器的中性悬停位置,将会 导致飞行器迅速下降或上升。在这种模式下你不能降落及关闭马达,因为现在 是油门摇杆控制高度,而非马达。请切换到稳定模式,才可以降落和关闭马达。 4、悬停模式Loiter 悬停模式是GPS定点+气压定高模式。应该在起飞前先让GPS定点,避免在空 中突然定位发生问题。其他方面跟定高模式基本相同,只是在水平方向上由GPS进行定位。 5、简单模式Simple Mode 简单模式相当于一个无头模式,每个飞行模式的旁边都有一个SimpleMode复 选框可以勾选。勾选简单模式后,飞机将解锁起飞前的机头指向恒定作为遥控 器前行摇杆的指向,这种模式下无需担心飞行器的姿态,新手非常有用。 6、自动模式 AUTO 自动模式下,飞行器将按照预先设置的任务规划控制它的飞行由于任务规划依 赖GPS的定位信息,所以在解锁起飞前,必须确保GPS已经完成定位(APM板 上蓝色LED常亮)切换到自动模式有两种情况:如果使用自动模式从地面起飞,飞行器有一个安全机制防止你误拨到自动模式时误启动发生危险,所以需要先 手动解锁并手动推油门起飞。起飞后飞行器会参考你最近一次ALTHold定高的 油门值作为油门基准,当爬升到任务规划的第一个目标高度后,开始执行任务 规划飞向目标;如果是空中切换到自动模式,飞行器首先会爬升到第一目标的 高度然后开始执行任务
apm飞控飞行模式详解
apm飞控飞行模式详解 1、稳定模式Stabilize 稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应 该使用此模式。 此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是 FPV第一视角飞行的最佳模式。 一定要确保遥控器上的开关能很方便无误地拨到该模式,这对抢救紧急情况十 分重要~ 2、定高模式ALT_HOLD 初次试飞之后就可以尝试定高模式,此模式不需要GPS支持,APM会根据气压 传感器的数据保持当前高度。 定高时如果不会定点,因此飞行器依然会漂移。可以遥控来移动或保持位置。 定高时就是APM控制油门来保持高度。但仍然可以用遥控油门来调整高度,不 可以用来降落,因为油门不会降到0。 稳定模式和定高模式之间切换时,要让遥控发射机的油门在同一位置,避免因 模式切换、油门控制方式发生变化造成飞行器突然上升或者下降。 3、悬停模式Loiter 悬停模式就是GPS定点模式。应该在起飞前先让GPS定点,避免在空中突然定 位发生问题。其他方面跟定高模式基本相同。 4、简单模式Simple Mode 设置过APM飞行模式的朋友都会注意到,软件界面的各个模式旁边,都有个“Simple Mode”简单模式的勾选框。勾了这个框之后的模式,飞行中会更加简单:
不用再管飞行器机头的朝向,可以将飞行器看成一个点,如果升降舵给出俯冲指令,飞行器就会飞得远离操作者;反之如果给出拉杆指令,飞行器会飞回操作者;给出向左滚转的指令,飞行器会向左飞,反之亦然。。。注意,这些前后左右的飞行,是不管当时的机头指向的~ 5、返航模式RTL 返航模式需要GPS定位。GPS在每次ARM前的定位点,就是当前的“家”的位置;GPS如果在起飞前没有定位,在空中首次定位的那个点,就会成为“家”。 进入返航模式后,飞行器会升高到15米,或者如果已经高于15米,就保持当前高度,然后飞回“家”。 还可以设置高级参数选择到“家”后是否自主降落,和悬停多少秒之后自动降落。 6、绕圈模式Circle 当切入绕圈模式时,飞行器会以当前位置为圆心绕圈飞行。而且此时机头会不受遥控器方向舵的控制,始终指向圆心。 如果遥控器给出横滚和俯仰方向上的指令,将会移动圆心。 与定高模式相同,可以通过油门来调整飞行器高度,但是不能降落。 圆的半径可以通过高级参数设置调整。 7、指导模式Guided 此模式需要地面站软件和飞行器之间通信。连接后,在任务规划器Mission Planner软件地图界面上,在地图上任意位置点鼠标右键,选弹出菜单中的“Fly to here”(飞到这里),软件会让你输入一 个高度,然后飞行器会飞到指定位置和高度并保持悬停。 8、跟随模式FollowMe
APM飞控搭配乐迪AT10设置六段开关教程
APM飞控搭配乐迪AT10设置六段开关教程玩APM飞控,玩转它的飞行模式切换是必修的一门课程,否则一块功能强大的APM飞控在你手里,切换不了飞行模式就只能自稳飞飞玩不出花样来,这对APM来说是一种浪费,因此我们必须要学会APM的飞行模式切换。 先了解下APM飞控的飞行模式切换原理。APM有多种飞行模式可供选择,但一次只能选择设置六种飞行模式,设置好的六种飞行模式是通过输入的第五通道来控制的(固定翼是第八通道),与常规遥控的低、中、高开关量不同,APM识别六种飞行模式的开关量是以识别遥控接收机输出的PWM脉宽值的区段为依据的,六个区段分别是0-1230,1231-1360,1361-1490,1491-1620,1621-1749,1750+,这些数值的单位为us,只要五通道输出值分别在这几个区段内的,就可以对应控制开启一个飞行模式,为防止飞行中pwm信号在临界值附近飘移导致误切换飞行模式,所以最佳的六个信号应该是在这六个区段中间,分别是1165,1295,1425,1555,1685,1815这几个值。本文将讲解利用乐迪AT10如何比较精确的设置出这六个信号。 乐迪AT10是深圳乐迪电子新推出的一款10通道模型遥控器,整机外观拥有Futaba 10C的影子,开关旋钮布局合理,操作方便,功能设置上则更优于10C,特别是中文化的操作菜单,更符合国内的使用环境,还支持数据回传,产品定位于专业级遥控,因此,笔者非常推荐使用这款遥控搭配APM使用。 在设置APM的六段开关前,需要对遥控进行一些基本的配置:1、设置为固定翼模式(不管APM的刷的什么固件,包括直升机,与之搭配的遥控必须设为固定翼模式,即每个通道独立输出);2、指定通道开关;3、矫正通道正反相。 现简要说明这几个配置的设置方法: 1、设置固定翼模式。打开遥控开关,长按一下MODE键,系统进入基础菜单,在基础菜单内, 移动导航键至系统功能设置菜单,按压push键进入,然后使用导航键移到机型一栏,使用push键的旋转功能将机型选为固定翼模型,
pixhawk中常出现的种飞行模式
从mission planner中设置pixhawk的飞行模式时,一共给出了13中飞行模式,分别为:Stabilize、Acro、AltHold、Auto、Guided、Loiter、TRL、Circle、Land、Drift、Sport、PosHold、Follow Me。在网上查看了不少资料,所有模式的概括说明都不齐全,所以自己整理了一下。13种飞行模式的注析如下: 1、Stabilize(稳定模式) 稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV 第一视角飞行的最佳模式。一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。 2、Acro(特技模式) 特技模式是仅基于速率控制的模式。特技模式提供了遥控器摇杆到飞行器电机之间的最直接的控制关系。在特技模式下飞行,就像是不装飞控的遥控直升机一样,需要持续不断的手工摇杆操作。 3、AltHold(定高模式) 定高模式(Alt Hold)是使用自动油门,试图保持目前的高度的稳定模式。定高模式时高度仍然可以通过提高或降低油门控制,但中间会有一个油门死区,油门动作幅度超过这个死区时,飞行器才会响应你的升降动作。当进入任何带有自动高度控制的模式,你目前的油门将被用来作为调整油门保持高度的基准。在进入高度保持前确保你在悬停在一个稳定的高度。飞行器将随着时间补偿不良的数值。只要它不会下跌过快,就不会有什么问题。
离开高度保持模式时请务必小心,油门位置将成为新的油门,如果不是在飞行器的中性悬停位置,将会导致飞行器迅速下降或上升。在这种模式下你不能降落及关闭马达,因为现在是油门摇杆控制高度,而非马达。请切换到稳定模式,才可以降落和关闭马达。 4、Auto(自动模式) 自动模式下,飞行器将按照预先设置的任务规划控制它的飞行。由于任务规划依赖GPS 的定位信息,所以在解锁起飞前,必须确保GPS已经完成定位(APM板上蓝色LED常亮)切换到自动模式有两种情况:一、如果使用自动模式从地面起飞,飞行器有一个安全机制防止你误拨到自动模式时误启动发生危险,所以需要先手动解锁并手动推油门起飞。起飞后飞行器会参考你最近一次ALT Hold定高的油门值作为油门基准,当爬升到任务规划的第一个目标高度后,开始执行任务规划飞向目标;二、如果是空中切换到自动模式,飞行器首先会爬升到第一目标的高度然后开始执行任务。 5、Guided(指导模式) 此模式需要地面站软件和飞行器之间通信。连接后,在任务规划器Mission Planner软件地图界面上,在地图上任意位置点鼠标右键,选弹出菜单中的“Fly to here”(飞到这里),软件会让你输入一个高度,然后飞行器会飞到指定位置和高度并保持悬停。 6、Loiter(光流定点模式) 光流定点,就是利用APM的光流传感器进行定点,这种定点受地形,光照因素影响较大,通常在20米以内定点效果较高。 7、TRL(返航模式)
2 arduplane APM 固定翼 飞行模式
Ardupilot notebook 飞行模式: Manual 手动模式: RC直接控制飞机不经过飞控,除触动failsafe, geo fence 保护外。 Stabilize 增稳: RC经过飞控简单的稳定,如果你放手飞机会自动平飞,相对的飞机的倾斜与机动会变的不容易。 最好使用FBWA模式替代飞机的增稳。 FBWA 线性A增稳: 对于没有经验的飞手是最佳模式。 飞机保持指定的侧倾限制LIM_ROLL_CD(公分-度)及和纵倾限制LIM_PITCH_MAX/ LIM_PITCH_MIN。 需要注意的是控制水平不意味着飞机能控制高度,主要是由飞行速度(油门)控制,如果想要高度保持,需要用FBWB模式。 FBWA油门是手动控制,输出量范围由THR_MIN和THR_MAX限制。 方向舵也是手动及飞控协调混控,即便在地面上可以控制轮子转动。 FBWB 线性B增稳: 类似于FBWA,但能够定高。 侧倾和俯仰同FBWA模式,并利用油门控制空速。 俯仰摇杆变化就会改变高度,放开后飞控试图保持目前的高度。多大的水平角反应依赖于FBWB_CLIMB_RATE参数,默认为2米/秒。 FBWB_ELEV_REV参数的默认值是向后拉摇杆导致飞机攀升。如果设置为1,则动作会相反。如果装了空速计,调整空速范围ARSPD_FBW_MIN到ARSPD_FBW_MAX,当油门最低时飞机将尝试在ARSPD_FBW_MIN飞行。最高时它会尝试在ARSPD_FBW_MAX飞行。 如果没有空速计,油门将调整输出量以达到所需定高要求。油门杆最好大过计算要求的值,也会导致飞的更快 方向舵跟FBWA 一样,是协调混控的。 Acro 特技模式: 能像手动模式做出特技,且又同FBWB能够定高。 做出翻滚及螺旋依赖ACRO_ROLL_RATE及ACRO_PITCH_RATE, 默认值是180度/秒,并响应着摇杆行程量。 飞机会一直保持高度,如果RC输入30度的侧倾及10度的纵倾后放开摇杆,飞机就保持在这个高度上,即便是倒飞的状态下。 所以这个模式很容易失速,需要及时切换到手动模式改出。 Cruise巡航模式:
apm飞控较为详细的入门教程
最近发现很多模友在看了泡泡老师的视频有很多细节没有看懂在群上提问,为了能使刚用上apm的模友一步到位,再来一个文字教程帮助你们快速使用。在此也感谢apm2.8交流群中的冷风群主提供的教程~废话不多说了 硬件安装 1、通过USB接口供电时,如果USB数据处于连接状态,APM会切断数传接口的通讯功能,所以请不要同时使用数传和USB线连接调试APM,USB接口的优先级高于数传接口,仅有供电功能的USB线不在此限; 2、APM板载的加速度传感器受震动影响,会产生不必要的动差,直接影响飞控姿态的计算,条件允许请尽量使用一个减震平台来安装APM主板; 3、APM板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。 使用建议 对于初次使用APM自驾仪的用户来说,建议你分步骤完成APM的入门使用: 1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能; 2、仅连接USB线学会固件的下载; 3、连接接收机和USB线完成APM的遥控校准、加速度校准和罗盘校准; 4、完成各类参数的设定; 5、组装飞机,完成各类安全检查后试飞; 6、PID参数调整; 7、APM各类高阶应用 地面站调试软件Mission Planner安装 首先,MissionPlanner的安装运行需要微软的Net Framework 4.0组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0并安装 安装完NetFramework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载,下载页面中每个版本都提供了MSI版和ZIP版可供选择。MSI 为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB 线即可使用。ZIP版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的Driver文件夹中。具体使用哪个版本请自行决定,如果是第一次安装使用,建议你下载MSI版。 以安装MSI版为例(注意:安装前请不要连接APM的USB线),双击下载后的MSI文件,然后一步一步Next即可,只是安装过程中弹出设备驱动程序安装向导时,请点击下一步继续,否则会跳过驱动程序的安装(关于教程的各类文件我会在网盘里共享)
APM飞控简介
APM飞控系统介绍 APM飞控是开源飞控系统,能够支持固定翼,直升机,3轴,4轴,6轴飞行器。在此我只介绍固定翼飞控系统。 飞控原理 在APM飞控系统中,采用的是两级PID控制方式,第一级是导航级,第二级是控制级,导航级的计算集中在medium_loop( ) 和fastloop( )的
update_current_flight_mode( )函数中,控制级集中在fastloop( )的stabilize( )函数中。导航级PID控制就是要解决飞机如何以预定空速飞行在预定高度的问题,以及如何转弯飞往目标问题,通过算法给出飞机需要的俯仰角、油门和横滚角,然后交给控制级进行控制解算。控制级的任务就是依据需要的俯仰角、油门、横滚角,结合飞机当前的姿态解算出合适的舵机控制量,使飞机保持预定的俯仰角,横滚角和方向角。最后通过舵机控制级set_servos_4( )将控制量转换成具体的pwm信号量输出给舵机。值得一提的是,油门的控制量是在导航级确定的。控制级中不对油门控制量进行解算,而直接交给舵机控制级。而对于方向舵的控制,导航级并不给出方向舵量的解算,而是由控制级直接解算方向舵控制量,然后再交给舵机控制级。 以下,我剔除了APM飞控系统的细枝末节,仅仅将飞控系统的重要语句展现,只浅显易懂地说明APM飞控系统的核心工作原理。 一,如何让飞机保持预定高度和空速飞行 要想让飞机在预定高度飞行,飞控必须控制好飞机的升降舵和油门,因此,首先介绍固定翼升降舵和油门的控制,固定翼的升降舵和油门控制方式主要有两种: 一种是高度控制油门,空速控制升降舵方式。实际飞行存在四种情况,第一种情况是飞机飞行过程中,如果高度低于目标高度,飞控就会控制油门加大,从而导致空速加大,然后才导致拉升降舵,飞机爬升;第二种情况与第一种情况相反;第三种情况是飞机在目标高度,但是空速高于目标空速,这种情况飞控会直接拉升降舵,使飞机爬升,降低空速,但是,高度增加了,飞控又会减小油门,导致空速降低,空速低于目标空速后,飞控推升降舵,导致飞机降低高度。这种控制方式的好处是,飞机始终以空速为第一因素来进行控制,因此保证了飞行的安全,特别是当发动机熄火等异常情况发生时,使飞机能继续保持安全,直到高度降低到地面。这种方式的缺点在于对高度的控制是间接控制,因此高度控制可能会有一定的滞后或者波动。 另一种是高度控制升降舵,空速控制油门的方式。这种控制方式的原理是设定好飞机平飞时的迎角,当飞行高度高于或低于目标高度时,在平飞迎角的基础上根据高度与目标高度的差设定一个经过PID控制器输出的限制幅度的爬升角,由飞机当前的俯仰角和爬升角的偏差来控制升降舵面,使飞机迅速达到这个爬升角,而尽快完成高度偏差的消除。但飞机的高度升高或降低后,必然造成空速的变化,因此采用油门来控制飞机的空速,即当空速低于目标空速后,在当前油门的基础上增加油门,当前空速高于目标空速后,在当前油门的基础上减小油门。这种控制方式的好处是能对高度的变化进行第一时间的反应,因此高度控制较好,缺点是当油门失效时,比如发动机熄火发生时,由于高度降低飞控将使飞机保持经过限幅的最大仰角,最终由于动力的缺乏导致失速。 但是以上仅仅是控制理论。在实际控制系统中,由于有些参量并不能较准确地测得,或者测量时数据不稳定,所以并不能完全按照上述的控制理论控制。例如空速的测量时相当不准确的,而且数据波动较严重,这样,就无法完全按照上述理论进行控制,必须在其基础上进行适当修改。以下以使用空速计情况和不使用空速计情况对APM飞控系统进行阐述。 (1),使用空速计情况 在使用空速计的情况下,升降舵是由空速控制。update_current_flight_mode( )调用calc_nav_pitch( )调用nav_pitch = -g.pidNavPitchAirspeed.get_pid(airspeed_error, dTnav)。
APM自动调参讲解
使用自动调参来自动调试 Contents [hide] ? 1 使用自动调参来自动调试 ? 2 自动调参都干什么 ? 3 设置自动调参模式 ? 4 在自动调参模式下飞行 ? 5 别太早停止 ? 6 完成调试 ?7 自动调参日志 ?8 手动调参 VS 自动调参 用APM:Plane的3.0.2发行版的固件,使用者现在可以使用心得自动调参模式,来调适roll和pitch。对于大部分飞机的大多数调试参数,这可以更简单地获得一个起始的合理调试。 自动调参都干什么 自动调参模式是一种飞行模式,与飞FBWA模式相同;但是它通过操纵者的飞行姿态输入的变化,来了解roll和pitch的关键值。所以操纵者可以将遥控器上的模式切换开关切换到自动调参模式,然后飞几分钟飞机。飞行的时候,操纵者需要尽可能多地进行姿态剧变,让自动调参代码可以了解飞机如何反应。 设置自动调参模式 你需要将自动调参模式选为你的遥控器上的飞行模式切换开关能选择的模式来给你的飞机设置自动调参。
你也应该设置AUTOTUNE_LEVEL参数来选择调适的等级,这个参数在你的地面站的高级参数页面里。 AUTOTUNE_LEVEL参数控制了你想要的调适的灵敏度。默认等级是5,这提供了一个很柔和的调适,很适合新手操控者。如果你是一个老手,那你应该选择等级6或者等级7,这会使调适更灵活(更快的姿态改变)。如果你还没有以低于7的等级完成一个起始的调适,高于7的等级是不推荐使用的。因为自动调参模式现在仍是实验性的,我们现在不推荐尝试高于8的等级。 你还需要确认你的飞行器的基础设置都正确了。尤其是确认所有舵面的反向开关都正确了,而且你设置的最低空速合理(自动调参只在飞机空速大于你设定的最低空速时进行)。同时确认你完成了遥控校准,因为只有使用遥控器摇杆能获得全控制行程时,自动调参才会工作。 其他需要确认的东西: ?如果你使用空速计,请确认它工作并且已经完成校准。请查看空速校准。 ?检查重心,确认在手动飞行飞机的时候重心正确。 ?检查舵面微调。你可能想在看完关于TRIM_AUTO选项的文件之后使用这个选项。 ?确认正确设置了失控保护。请尝试将你的飞机放在地上并且关闭遥控器(并且卸下螺旋桨或者做相关安全保护措施)然后检查飞机如何反应。 ?设置一个安全的返航集合点,如果需要的话。
APM for PX4飞控使用手册-第一章:起步-中文翻译
APM for PX4飞控使用手册 第一章:起步——sw笨笨翻译 1.介绍:3D Robotics的开源飞控技术解决方案 APM:Copter,带有高级组织形式的个人自动导航仪技术,能够为飞行器带来易用的自主飞行能力。本手册可以带领您进行第一次的设置、调参和飞行活动。 2.什么是APM:Copter系统 APM:Copter是一种基于APM飞控板和Mission Planner地面站软件的多用途无人系统。APM飞控通过内置的陀螺仪、加速度计和其他电子元件控制多旋翼的飞行。在地面站计算机上使用Mission Planner定制飞行任务并下载到APM。一旦飞行器进入自主飞行模式,APM从GPS模块读取位置信息并执行任务脚本。为了安全起见,APM需要连接一个遥控器,用于对飞行器进行人工遥控。飞行
器使用锂电池作为电源,每次飞行要至少带两块电池。要使得飞行更加有趣,你可以搭载有效载荷:空中拍照,视频片段,或者你自己需要的任务设备。 试飞APM的基本步骤如下: 1)起步:了解APM:Copter以及无人机系统组成。 2)组装:建立你的旋翼系统,包含飞控和GPS模块。 3)地面站设置:在地面站计算机上安装Mission Planner,并向飞控板上传固件。4)设置遥控器:建立遥控器与飞控的连接,设置飞行模式,启动传感器。5)调参(DIY需要):校准电调,核对电机的旋转以及旋转方向,校准性能并调参。 6)建立飞行任务:Mission Planner介绍,创建导航点,下载任务。 7)飞行:启动测试飞行,安全飞行,飞行策略,飞行检验,和应急程序。3.系统构成 要使用APM:Copter你需要如下设备: 1)多旋翼飞行器 (前两句广告略——译者注)新手比较适合使用四旋翼飞行器,相关需求成本较低,使用简单。六旋翼飞行器比四旋翼飞行器稳定,带载荷能力较强。Y6型六旋翼飞行器飞行效率较常规六旋翼略低,但是更加稳定,设计更加有利于前置摄像机,并且能够在单发动机失效的情况下提供裕度。
相关文档
- APM 飞行模式 大全
- APM飞控介绍要点
- apm飞控入门教程
- apm飞控飞行模式详解
- 2 arduplane APM 固定翼 飞行模式
- APM飞控简介
- apm飞控入门教程
- apm飞控入门教程
- pixhawk中常出现的种飞行模式
- Pixhawk飞控快速使用指南
- apm飞控较为详细的入门教程
- APM for PX4飞控使用手册-第一章:起步-中文翻译
- APM飞控源码讲解
- Pixhawk飞控设置飞行模式教程及LED灯意义
- pixhawk中常出现的13种飞行模式
- APM飞行模式详解
- APM飞控系统详细介绍
- apm飞控飞行模式详解
- APM飞控搭配乐迪AT10设置六段开关教程
- mission planner所有飞行模式 中文参数 调参必备