原子力显微镜工作原理、步骤、注意事项
原子力显微镜
工作原理:
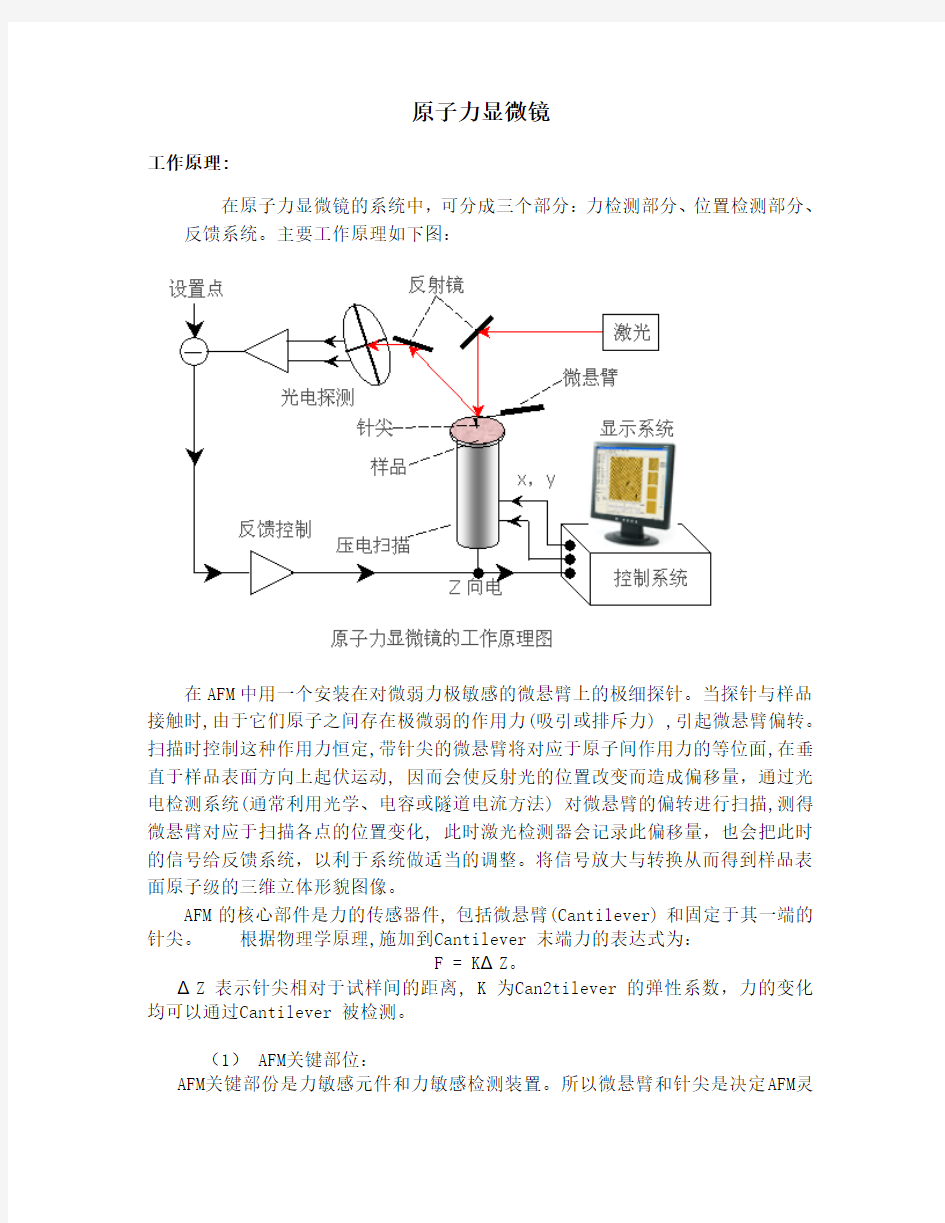
在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。主要工作原理如下图:
在AFM中用一个安装在对微弱力极敏感的微悬臂上的极细探针。当探针与样品接触时,由于它们原子之间存在极微弱的作用力(吸引或排斥力) ,引起微悬臂偏转。扫描时控制这种作用力恒定,带针尖的微悬臂将对应于原子间作用力的等位面,在垂直于样品表面方向上起伏运动, 因而会使反射光的位置改变而造成偏移量,通过光电检测系统(通常利用光学、电容或隧道电流方法) 对微悬臂的偏转进行扫描,测得微悬臂对应于扫描各点的位置变化, 此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整。将信号放大与转换从而得到样品表面原子级的三维立体形貌图像。
AFM 的核心部件是力的传感器件, 包括微悬臂(Cantilever) 和固定于其一端的针尖。根据物理学原理,施加到Cantilever 末端力的表达式为:
F = KΔZ。
ΔZ 表示针尖相对于试样间的距离, K 为Can2tilever 的弹性系数,力的变化均可以通过Cantilever 被检测。
(1) AFM关键部位:
AFM关键部份是力敏感元件和力敏感检测装置。所以微悬臂和针尖是决定AFM灵
敏度的核心。为了能够准确地反映出样品表面与针尖之间微弱的相互作用力的变化,得到更真实的样品表面形貌,提高AFM 的灵敏度,微悬臂的设计通常要求满足下述条件: ①较低的力学弹性系数,使很小的力就可以产生可观测的位移; ②较高的力学共振频率; ③高的横向刚性,针尖与样品表面的摩擦不会使它发生弯曲; ④微悬臂长度尽可能短;⑤微悬臂带有能够通过光学、电容或隧道电流方法检测其动态位移的镜子或电极; ⑥针尖尽可能尖锐。
(3) AFM的针尖技术
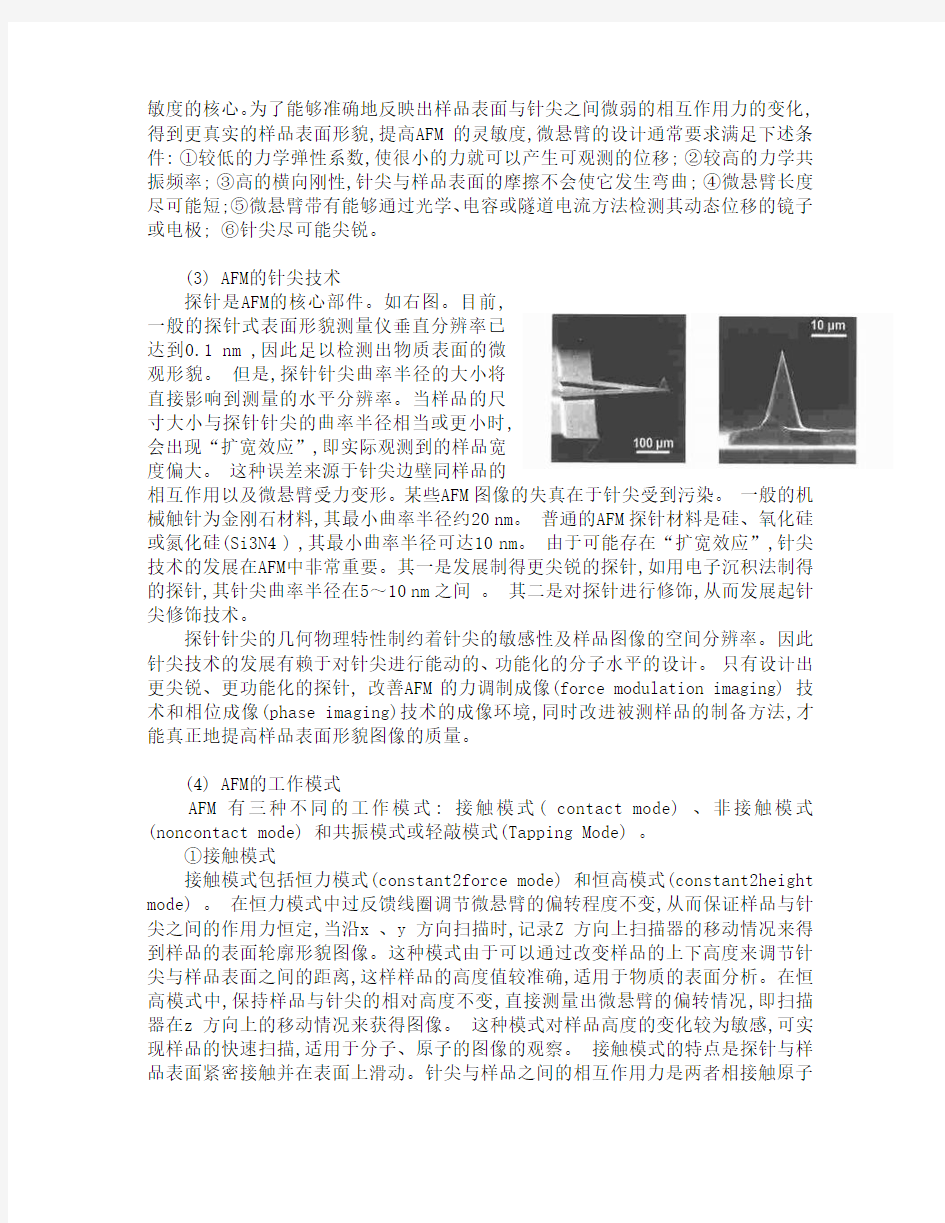
探针是AFM的核心部件。如右图。目前,
一般的探针式表面形貌测量仪垂直分辨率已
达到0.1 nm ,因此足以检测出物质表面的微
观形貌。但是,探针针尖曲率半径的大小将
直接影响到测量的水平分辨率。当样品的尺
寸大小与探针针尖的曲率半径相当或更小时,
会出现“扩宽效应”,即实际观测到的样品宽
度偏大。这种误差来源于针尖边壁同样品的
相互作用以及微悬臂受力变形。某些AFM 图像的失真在于针尖受到污染。一般的机械触针为金刚石材料,其最小曲率半径约20 nm。普通的AFM 探针材料是硅、氧化硅或氮化硅(Si3N4 ) ,其最小曲率半径可达10 nm。由于可能存在“扩宽效应”,针尖技术的发展在AFM中非常重要。其一是发展制得更尖锐的探针,如用电子沉积法制得的探针,其针尖曲率半径在5~10 nm 之间。其二是对探针进行修饰,从而发展起针尖修饰技术。
探针针尖的几何物理特性制约着针尖的敏感性及样品图像的空间分辨率。因此针尖技术的发展有赖于对针尖进行能动的、功能化的分子水平的设计。只有设计出更尖锐、更功能化的探针, 改善AFM 的力调制成像(force modulation imaging) 技术和相位成像(phase imaging)技术的成像环境,同时改进被测样品的制备方法,才能真正地提高样品表面形貌图像的质量。
(4) AFM的工作模式
AFM 有三种不同的工作模式: 接触模式( contact mode) 、非接触模式(noncontact mode) 和共振模式或轻敲模式(Tapping Mode) 。
①接触模式
接触模式包括恒力模式(constant2force mode) 和恒高模式(constant2height mode) 。在恒力模式中过反馈线圈调节微悬臂的偏转程度不变,从而保证样品与针尖之间的作用力恒定,当沿x 、y 方向扫描时,记录Z 方向上扫描器的移动情况来得到样品的表面轮廓形貌图像。这种模式由于可以通过改变样品的上下高度来调节针尖与样品表面之间的距离,这样样品的高度值较准确,适用于物质的表面分析。在恒高模式中,保持样品与针尖的相对高度不变,直接测量出微悬臂的偏转情况,即扫描器在z 方向上的移动情况来获得图像。这种模式对样品高度的变化较为敏感,可实现样品的快速扫描,适用于分子、原子的图像的观察。接触模式的特点是探针与样品表面紧密接触并在表面上滑动。针尖与样品之间的相互作用力是两者相接触原子
间的排斥力,约为10 - 8 ~10 - 11N。接触模式通常就是靠这种排斥力来获得稳定、高分辨样品表面形貌图像。但由于针尖在样品表面上滑动及样品表面与针尖的粘附力,可能使得针尖受到损害,样品产生变形, 故对不易变形的低弹性样品存在缺点。
②非接触模式
非接触模式是探针针尖始终不与样品表面接触,在样品表面上方5~20 nm 距离内扫描。针尖与样品之间的距离是通过保持微悬臂共振频率或振幅恒定来控制的。在这种模式中,样品与针尖之间的相互作用力是吸引力———范德华力。由于吸引力小于排斥力,故灵敏度比接触模式高,但分辨率比接触式低。非接触模式不适用于在液体中成像。
③轻敲模式
在轻敲模式中,通过调制压电陶瓷驱动器使带针尖的微悬臂以某一高频的共振频率和0。 01~1 nm 的振幅在Z 方向上共振,而微悬臂的共振频率可通过氟化橡胶减振器来改变。同时反馈系统通过调整样品与针尖间距来控制微悬臂振幅与相位,记录样品的上下移动情况,即在Z 方向上扫描器的移动情况来获得图像。由于微悬臂的高频振动,使得针尖与样品之间频繁接触的时间相当短,针尖与样品可以接触,也可以不接触,且有足够的振幅来克服样品与针尖之间的粘附力。因此适用于柔软、易脆和粘附性较强的样品,且不对它们产生破坏。这种模式在高分子聚合物的结构研究和生物大分子的结构研究中应用广泛。
(5) AFM中针尖与样品之间的作用力
AFM检测的是微悬臂的偏移量,而此偏移量取决于样品与探针之间的相互作用力。其相互作用力主要是针尖最后一个原子和样品表面附近最后一个原子之间的作用力。
当探针与样品之间的距离d 较大(大于5 nm) 时,它们之间的相互作用力表现为范德华力(Van der Waals forces) 。可假设针尖是球状的,样品表面是平面的,则范德华力随1Pd2 变化。如果探针与样品表面相接触或它们之间的间距d 小于0。
3 nm ,则探针与样品之间的力表现为排斥力(Pauli exclusion forces) 。这种排斥力与d13 成反比变化,比范德华力随d 的变化大得多。探针与样品之间的相互作用力约为10 - 6 ~10 - 9N ,在如此小的力作用下,探针可以探测原子,而不损坏样品表面的结构细节。品与探针的作用力还有其他形式,如当样品与探针在液体介质中相接触时,往往在它们的表面有电荷,从而产生静电力;样品与针尖都有可能发生变形,这样样品与针尖之间有形变力;特定磁性材料的样品和探针可产生磁力作用;对另一些特定样品和探针,可能样品原子与探针原子之间存在相互的化学作用,而产生化学作用力。但在研究样品与探针之间的作用力的大小时,往往假设样品与探针特定的形状(如平面样品、球状探针) ,可对样品和探针精心设计与预处理,避免或忽略静电力、形变力、磁力、化学作力等的影响,而只考虑范德华力和排斥力。
操作步骤:
(1)依次开启:电脑-控制机箱-高压电源-激光器。
(2)用粗调旋钮将样品逼近微探针至两者间距<1 mm。
(3)再用细调旋钮使样品逼近微探针:顺时针旋细调旋钮,直至光斑突然向
PSD移动。
(4)缓慢地逆时针调节细调旋钮并观察机箱上反馈读数:Z反馈信号约稳定在-150至-250之间(不单调增减即可),就可以开始扫描样品。
(5)读数基本稳定后,打开扫描软件,开始扫描。
(6)扫描完毕后,逆时针转动细调旋钮退样品,细调要退到底。再逆时针转动粗调旋钮退样品,直至下方平台伸出1厘米左右。
(7)实验完毕,依次关闭:激光器-高压电源-控制机箱
(8)处理图像,得到粗糙度
注意事项:
原子力操作注意事项(接触模式根据)
1. 换接触模式的探针时候,利用短一点的那个针会比较好,所以换针的过程中可以把探针放偏一些,保证短针能在中间,可以良好的反射激光。
2. 调节光路过程中,可以根据反射光点的大小和探测器的位置对探针进行适当的调节,让光斑照射在探针针尖上。同时可以利用光学显微镜进行细调。Sum值不一定大于4.0,有可能小于的情况。
3. 在调节光路完毕后,必须把保护盖盖上,减少电磁波的干扰。
4. 利用减震架和关闭日光灯,避免不必要的干扰信号。如果干扰信号仍存在可以打开低通滤波,适当选择等级(用1,2,3,4级)。
5. 在扫描过程中,最好扫描两次,因为第二次对图像有一定的矫正作用。
6. 扫描器的选择和扫描范围:最佳扫描范围是最大扫描范围的十分之一。
原子力显微镜的原理及使用
原子力显微镜的原理及使用 通过近代物理实验课的学习,了解了许多仪器的工作原理以及使用方法,对今后的科研学习有很大的 帮助。其中原子力显微镜就是其中之一,对于做材料方面的专业来说,原子力显微镜在表征物质的表面结 构及性质起着重要的作用。前段时间我们利用AFM对用RF磁控溅射制备的PZT薄膜进行了表征,通过对AFM的使用并查找相关文献,使我对原子力显微镜有了更加深刻的认识。 原子力显微镜,英文:Atomic Force Microscope ,简写: AFM。是一种利用原子,分子间的相互作用力来观察物体表面微观 形貌的新型实验技术.它有一根纳米级的探针,被固定在可灵敏操 控的微米级弹性悬臂上.当探针很靠近样品时,其顶端的原子与样 品表面原子间的作用力会使悬臂弯曲,偏离原来的位置.根据扫描 样品时探针的偏离量或振动频率重建三维图像.就能间接获得样品 表面的形貌或原子成分。 它主要由带针尖的微悬臂、微悬臂运动检测装置、监控其运 动的反馈回路、使样品进行扫描的压电陶瓷扫描器件、计算机控 制的图像采集、显示及处理系统组成。微悬臂运动可用如隧道电 流检测等电学方法或光束偏转法、干涉法等光学方法检测,当针 尖与样品充分接近相互之间存在短程相互斥力时,检测该斥力可获得表面原子级分辨图像,一般情况下分 辨率也在纳米级水平。AFM测量对样品无特殊要求,可测量固体表面、吸附体系等。 一、仪器结构: 在原子力显微镜(Atomic Force Microscopy,AFM)的系统中,可分成三个部分:力检测部分、位置 检测部分、反馈系统。 1、力检测部分 在原子力显微镜(AFM)的系统中,所要检测的力是原子与原子之间的范德华力。所以在本系统中是 使用微小悬臂(cantilever)来检测原子之间力的变化量。微悬臂通常由一个一般100~500μm长和大约500nm~5μm厚的硅片或氮化硅片制成。微悬臂顶端有一个尖锐针尖,用来检测样品-针尖间的相互作用力。这微小悬臂有一定的规格,例如:长度、宽度、弹性系数以及针尖的形状,而这些规格的选择是依照样品 的特性,以及操作模式的不同,而选择不同类型的探针。 2、位置检测部分 在原子力显微镜(AFM)的系统中,当针尖与样品之间有了交互作用之后,会使得悬臂cantilever摆动,所以当激光照射在微悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量 的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作 信号处理。 3、反馈系统 在原子力显微镜(AFM)的系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作 反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷管制作的扫描器做适当的移动,以保持样品与针 尖保持一定的作用力。 AFM系统使用压电陶瓷管制作的扫描器精确控制微小的扫描移动。压电陶瓷是一种性能奇特的材料, 当在压电陶瓷对称的两个端面加上电压时,压电陶瓷会按特定的方向伸长或缩短。而伸长或缩短的尺寸与 所加的电压的大小成线性关系。也就是说,可以通过改变电压来控制压电陶瓷的微小伸缩。通常把三个分 别代表X,Y,Z方向的压电陶瓷块组成三角架的形状,通过控制X,Y方向伸缩达到驱动探针在样品表面 扫描的目的;通过控制Z方向压电陶瓷的伸缩达到控制探针与样品之间距离的目的。 原子力显微镜(AFM)便是结合以上三个部分来将样品的表面特性呈现出来的:在原子力显微镜(AFM)的系统中,使用微小悬臂(cantilever)来感测针尖与样品之间的相互作用,这作用力会使微悬臂摆动, 再利用激光将光照射在悬臂的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测 器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性 以影像的方式给呈现出来。 二、工作原理: 将一个对微弱力极敏感的微悬臂一端固定,另一端有一微小的针尖,针尖与样品表面轻轻接触,由于 针尖尖端原子与样品表面原子间存在极微弱的排斥力,通过在扫描时控制这种力的恒定,带有针尖的微悬 臂将对应于针尖与样品表面原子间作用力的等位面而在垂直于样品的表面方向起伏运动。利用光学检测法
注塑机工作原理及构造
注塑机工作原理及构造 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
从料斗加入料筒内,料筒外由加热圈加热,使物料熔融。在料筒内装有在外动力油马达作用下驱动旋转的螺杆。物料在螺杆的作用下,沿着螺槽向前输送并压实。物料在外加热和螺杆剪切的双重作用下逐渐的塑化、熔融和均化。当螺杆旋转时,物料在螺槽摩擦力及剪切力的作用下把已熔融的物料推到螺杆的头部,与此同时,螺杆在物料的反作用力作用下向后退,使螺杆头部形成储料空间,完成塑化过程。然后,螺杆在注射油缸活塞杆推力的作用下,以高速、高压,将储料室的熔融料通过喷嘴注射到模具的型腔中。型腔中的容料经过保压、冷却、固化定型后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制件从模具顶出落下。 塑料从固体料经料斗加入到料筒中,经过塑化熔融阶段,直到注射、保压、冷却、启模、顶出制品落下等过程,全是按着严格地自动化工作程序操作的,如图1-20所示。
第二节 注塑机组成 注塑机根据注塑成型工艺要求是一个机电一体化很强的机种,主要由注塑 部件、合模部件、机身、液压系统、加热系统、冷却系统、电气控制系统、加料装置等组成,如图1-21所示。 第二节注 塑 机 结 构 注塑机总体结构 注塑 注塑部件 塑化装置 注射座 注射油缸 螺杆驱动装置 注射座油缸 螺杆 料筒 螺杆头 喷嘴 合模部件 合模装置 调模装置 制品顶出装置 机身 液压系统 泵、油马达、阀 蓄能器、冷却器、过滤装置 管路、压力表 冷却系统 入料口冷却、模具冷却 润滑系统 润滑装置、分配器 电器控制系统 动作程序控制;料筒温度控制;泵电机控制 安全保护;故障监测、报警;显示系统 机械手 加料装置 图1-21 注塑机组成示图 图1-20 注塑机工作程序框图
注塑机工作原理及构造.docx
第一章注塑机工作原理及构造 第一节注塑机工作原理 一、注塑机工作原理 注塑成型机简称 注塑机,其机械部分主 要由注塑部件和合模部 件组成。注塑部件主要 由料筒和螺杆及注射油 缸组成示意如图 1-19所示。 注塑成型是用塑性 的热物理性质,把物料 从 料斗加入料筒内,料筒外由 加热圈加热,使物料熔融。在料筒内装有在外动力 油马达作用下驱动旋转的螺杆。物料在螺杆的作用下,沿着螺槽向前输送并压实。 物料在外加热和螺杆剪切的双重作用下逐渐的塑化、熔融和均化。当螺杆旋转时, 物料在螺槽摩擦力及剪切力的作用下把已熔融的物料推到螺杆的头部,与此同 时,螺杆在物料的反作用力作用下向后退, 使螺杆头部形成储料空间,完成塑化 过程。然后,螺杆在注射油缸活塞杆推力的作用下,以高速、高压,将储料室的 熔融料通过喷嘴注射到模具的型腔中。 型腔中的容料经过保压、冷却、固化定型 后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制件从模 具顶出落下。 塑料从固体料经料斗加入到料筒中,经过塑化熔融阶段,直到注射、保压、冷却、 启模、顶出制品落下等过程,全是按着严格地自动化工作程序操作的,如图1-20 所示。 1—模具 2—喷嘴 3—料筒 4—螺杆 5—加热圈 6—料斗7 —油马达 8—注射油缸 9 一储料室 10 —制件 11—顶杆 注射 > 座动 作选 择
第二节注塑机组成 注塑机根据注塑成型工艺要求是一个机电一体化很强的机种,主要由注塑 部件、合模部件、机身、液压系统、加热系统、冷却系统、电气控制系统、加料 装置等组成,如图 1?21所示。 厂螺杆 料筒 r 塑化装置 s 螺杆头 注射座 丿 i 喷嘴 A 注射油缸 螺杆驱动装置 I 注射座油缸 r 合模装置 合模部件x 调模装置 I 制品顶出装置 厂泵、油马达、阀 S 蓄能器、冷却器、过滤装置 ?管路、压力表 冷却系统 —— 入料口冷却、模具冷却 润滑系统——润滑装置、分配器 「动作程序控制;料筒温度控制;泵电机控制 、" 1安全保护;故障监测、报警;显示系统 加料装置 机械手 图1-21注塑机组成示图 注塑部件 机身 液压系统
原子力显微镜的工作原理及基本操作
2015年秋季学期研究生课程考核 (读书报告、研究报告) 考核科目:原子力显微镜的工作原理及基本操作学生所在院(系): 学生所在学科: 学生姓名: 学号: 学生类别:应用型 考核结果阅卷人
原子力显微镜的工作原理及基本操作 一、实验目的 1.了解原子力显微镜的工作原理 2.掌握用原子力显微镜进行表面观测的方法 二、原子力显微镜结构及工作原理 2.1 AFM的工作原理 AFM是用一个一端装有探针而另一端固定的弹性微悬臂来检测样品表面信息的,当探针扫描样品时,与样品和探针距离有关的相互作用力作用在针尖上,使微悬臂发生形变。AFM系统就是通过检测这个形变量,从而获得样品表面形貌及其他表面相关信息 1.原子力作用机制 当两个物体的距离小到一定程度的时候,它们之间将会有原子力作用.这个力主要与针尖和样品之间的距离有关.从对微悬臂形变的作用效果来分,可简单将其分为吸引力和排斥力,它们分别在不同的工作模式下、不同的作用距离起主导作用.探针与样品的距离不同,作用力的大小也不相同,针尖/样品距离曲线如图1所示. 图1 针尖/样品距离曲线 2.原子力显微镜的成像原理 AFM的微悬臂绵薄而修长,当对样品表面进行扫描时,针尖与样品之间力的作用会使微悬臂发生弹性形变,针尖碰到样品表面时,很容易弹起和起伏,它非常的灵敏,极小的力的作用也能反应出来.也就是说如果检测出这种形变,就可以知道针尖-样品间的相互作用力,从而得知样品的形貌。
图2 光束偏转法的原理图 微悬臂形变的检测方法一般有电容、隧道电流、外差、自差、激光二极管反馈、偏振、偏转方法。偏转方法是采用最多的方法,也是原子力显微镜批量生产所采用的方法.图2就是光束偏转法的原理图。 3.原子力显微镜的工作模式 AFM主要有三种工作模式:接触模式(ContactMode)、非接触模式(Non-contact Mode)和轻敲模式( Tapping Mode),如图3. 图3 三种工作模式 接触模式中,针尖一直和样品接触并在其表面上简单地移动.针尖与样品间的相互作用力是两者相接触原子间的排斥力,其大小约为10-8~10-11N。 非接触模式是控制探针一直不与样品表面接触,让探针始终在样品上方5~20nm 距离内扫描.因为探针与样品始终不接触,故而避免了接触模式中遇到的破坏样品和污染针尖的问题,灵敏度也比接触式高,但分辨率相对接触式较低,且非接触模式不适合在液体中成像。 轻敲模式是介于接触模式和非接触模式之间新发展起来的成像技术,类似与非接触模式,但微悬臂的共振频率的振幅相对非接触模式较大,一般在0.01~1nm.分辨率几乎和接触模式一样好,同时对样品的破坏也几乎完全消失,克服了以往常规模式的局限。 4.原子力显微镜的构成 SPA-300HV型显微镜主要包括以下四个系统: 减震系统、头部系统、电子学控制系统、计算机软件系统(图4为结构图)。
机台操作基本步骤及注意事项
機台操作基本步驟及注意事項 CNC銑床是一項自動化、規范化、標準化的作業流程,為了提高工作效率及保証產品質量,特定如下操作流程: 一、開關機步驟 1 檢查導軌之油量及氣壓表的指針是否在規定范圍內.(氣壓5.5KG/CM2,導軌油 0.75L以上,切削油60%以上) 2 開穩壓器上的電源開關 3 開CNC本身機體電源開關 4 開CNC電腦電源開關 5 等屏幕示現字體后,釋放緊急停止鈕.(順時針旋轉) 6 待字體停止閃爍后,將模式旋轉鈕置示“原點復歸”處按X、Y、Z三軸進行 原點復歸. 7 待其指示燈全部亮時,輸入CNC熱機程式. 二、工作步驟 1 先查看床台工作范圍內是否有障礙物,有則清理. 2 根據要銑之工件確定工件的位置,並用治具夾好.(牢固.穩定) 3 尋找工件原點(同程式原點一樣)將其數值輸入G54 尋邊器尋找 目測 4 用手輪或“寸動”按鈕升起Z軸,Z軸盡量高一些. 5 執行程式 (1)執行記意體力: 模式開關置于自動執行處,再按啟動鍵. (2)執行紙帶傳輸: 模式開關置于紙帶執行處,再以電腦輸入按啟動鍵. 6 測量加工零件 7 取下加要工好的零件.
三、機台的操作與加工 電極制作,裝夾材料選用程式中第一把刀銑平端面,同時確定加工中心. 操作如下: (1)模式開關指向“手動指令”屏幕出現“MDI”輸入M03 再按起動鍵. (2)模式開關指向“手輪”用手動銑平端面,確認中心相對坐標X、Y、Z軸歸 零,在“手動指令”下,其機械座標值輸入G54. (3)模式“寸動”先按Z,並同時按快動提升Z軸. 四、通過電腦從磁片中傳送要執行的程式,操作如下: 1進入DNC當屏幕出現“AIC亞州國際”等字樣,表示已進入DNC. 2 按兩次F2,再輸入程式名,. 3 模式指向程式編輯,.(注以上2與3中程式名可相 同,也可不相同) 4 調好切削液,並執行: 模式指向“自動執行”,屏幕顯示要執行的程式,再按 “起動鍵”. 五、換刀執行下一個程式時,要重新設定Z軸高度. (1)模式“寸動”左手握住刀杆,右手按主軸上的“主軸松刀”進行換刀. (2)模式“寸動”用左手按“主軸正轉”同時右手按“雙手操作”或在“手動 指定”輸入M03 S×××,再按“起動” . (3)模式“手輪”輕輕地銑平端面,銑深為0.01-0.02mm. (4)相對坐標Z值歸零,將其機械座標輸入G54. 六、模板加工 標準模板 (1)模板的尺寸檢測與校正,千分表的針頭必頇是在模板的基準邊上移動.
计算机的基本组成及工作原理
计算机的基本组成及工作原理(初中信息技术七年级) 讲课:教技12江旭美【教学设计学科名称】 计算机的基本组成及工作原理是广西教育出版社出版的初中 信息技术七年级教材第一册模块二<计算机的发展》第二节教学内容。 【学情分析】 初一新生刚入学,对信息技术硬件方面的知识知道可能不多,对硬件普遍 有一种神秘感,觉得计算机高深莫测,本节课就是要对电脑软硬件进行深入 “解剖”,并对工作原理做讲解,让学生了解电脑各组成部分,更好的使用 电脑。 【教材内容分析】 本节内容是广西教育出版社初中信息技术七年级第一册模块 二《计算机的发展》第二节教学内容。本节主要让学生掌握计算机的组成, 理解计算机系统中信息的表示,了解计算机的基本工作原理。本节内容以感 性认识为主,增强学生的计算机应用意识,通过大量举例及用眼睛看、用手摸、 用脑想,对计算机的基本组成、软硬件常识、发展有一定了解和比较清晰的认 识。通过学生亲手触摸计算机组件和教师运行自主制作的多媒体课件进行教 学,打破学生对计算机的“神秘感”,觉得计算机并不难学,而且非常实际,认 识到计算机只是普通技能,提高学生学习兴趣。 【教学目标】 知识与技能:掌握计算机的组成,理解计算机系统中信息的表示,了解 计算机的基本工作原理。 过程与方法:向学生展示拆卸的旧电脑部件及未装任何系统的电脑,通过 实际观察加教师讲授的方法完成本节内容。 情感态度与价值观:培养学生的科学态度,激发学生的想象能力和探索精 神。 【教学重难点分析】 教学重点:计算机的组成,计算机系统中信息的表示。 教学难点:计算机的基本工作原理。 【教学课时】 2课时 【教学过程】 图片图片 师:观察图片结合实物并思考:从外观上来看,计算机广.般由哪些部分组成? 生:讨论、思考、回答 [设计意图】通过图片的展示,同学们对计算机的硬件有了直观的印象, 初步的了解。 (二)自主学习,探究新知 1、先请同学们自己看书P17-P20内容,边看书边思考: ①完整的计算机系统由哪两部分组成?
操作步骤和注意事项
连续流动分析仪使用步骤和注意事项 适用于新用户,老用户也可以做为参考,或者直接略过参看下一章节。 1.开机前检查 1.1 检查蠕动泵两侧导轨是否安装正确,泵管卡块是否安装到位。 1.2检查泵管安装是否正确 1.3检查管路是否连接正确, 1.3.1检查流程 进样针泵管化学模块中的混合圈透析膜 加热池检测器中的流通池废液管 1.3.2检查管路中的接头(两通、三通、玻璃管间的塑料套管)是否牢靠,不会出现漏液 或进气泡现象。 1.3.3运行时间长后,玻璃管间的塑料套管上会出现有色颗粒沉淀,应及时更换新的套管, 否则在测定时会带来较大的噪声。 1.3.4检查泵管的选择是否正确,新用户最好对照法的装置图进行检查,如泵管出现老损 时请及时更换。 1.3.5检查空气管路是否连接正确,每次开机前最好将空气阀上的硅胶管左右移动一下, 改变硅胶管上受力点的位置,这样可以提高硅胶管的使用寿命。 1.4 滤光片是否正确 注:滤光片不用时用原包装袋装好放入干燥器皿中,防止在潮湿空气中光学老化。 1.5 管路中加热池,紫外消解器或蒸馏器是否连接正确(如有) 1.6 检查电源线与数据传输线是否连接正确,如有搬动时此项检查尤为重要。 1.7 打开各部件(进样器、蠕动泵、化学模块上的加热池及紫外灯、检测器)电源:1.7.1 蠕动泵主电源开关在右侧下,上红色开关控制启动和停止。 1.7.2 打开在线蒸馏装置开关(如果需要),不用时请关闭电源。 1.7.3 化学模块上加热池的温度控制已依据分析法设定好,使用时直接连接电源即可。紫 外灯电源线在化学模块下,如果要使用直接连接电源线。注:温度对显色反应的灵敏度影响很大,忘记打开加热池,可能会带来显色反应的灵敏度下降。 1.8 电源开启后进样器会自检。启动蠕动泵,将管路放入蒸馏水中,清洗管路,如果有
翻车机操作步骤及注意事项
翻车机操作步骤及注意事项 翻车机设备主要分为四大部分:重调机、翻车机、迁车台和空调机,共有三种操作模式:“集中手动”、“自动”和“就地调试”,正常情况下是在“集中手动”或“自动”模式下由主控工进行操作。翻车机在翻车过程中,主控工要严密监视现场设备运转情况,当设备出现故障或发生意外情况时要及时停机,并将翻车机转换到“集中手动”模式后,然后通知跟班维修人员维修。 翻车机各部分初始位:重调机停在“回退到位”处,翻车机停在“0度”,迁车台停在“空车线对准”处,空调机停在“返回到位”处。 翻车机设备启动步骤:变频器合闸、油泵合闸、自动启动。停机步骤与之相反。长时间不翻车要将变频器和油泵分闸,冬季油泵可以不停。 “集中手动”和“自动”操作步骤略,主要是“就地调试”操作。 一、重调机就地操作步骤及注意事项: 重调机运行动作顺序及具体步骤:重调机“抬臂到位”停在起始位“回退到位”处,按“接车”按钮——重调机接车,到“停车落臂”处停止——重调机落臂,前后钩同时提销——“落臂到位”且后钩“开到位”——接车,“后钩合到位”后停——牵车,到翻车机“进车口”(当非第一车时,重调机推空车,前钩合到位)——单车计4次(双车计8次)停——人工摘钩完毕后——牵车,到“单(双)车到位”,提后钩——牵车,到“前行到位”,提前钩——接车,到“回退到位”,抬臂——抬臂到位,至此重调机一个动作周期完成。 就地操作时需要注意的事项: 1、就地操作时,牵、接车一律使用低速。 2、在“停车落臂”处落臂时,要先确认重车没有溜车,大臂碰不到重车;接车时,确认后钩开到位,夹轮器送夹到位。 3、牵整列车:牵车时,要先确认翻车机在“0度”,并且“松压到位”、“松靠到位”,以及迁车台“重车线对准”、“插销到位”和“松涨到位”,迁车台上无车。 4、提后钩时,要确认重车停止翻车机中心,前后端未露出翻车机本体。 5、提前钩时,要确认空车确实已全部推倒迁车台上。 6、抬臂时,重调机尽可能在“回退到位”处,如果未在“回退到位”处,也要确认重调机前后钩与车辆车钩确实已经脱开。 7、由于电气检测元件损坏,当抬臂后长时间没有“抬臂到位”信号,在确认大臂确已抬到位后,要按“停止”按钮,防止因为没有“抬臂到位”信号,抬臂液压阀一直通电,造成液压阀线圈烧毁。落臂、提前钩、提后钩时与之相同。 二、翻车机就地操作步骤及注意事项: 翻车机运行动作顺序及具体步骤为:单(双)车到位,后钩“提销到位”,且重调机牵车至“前行减速”或“回退到位”限位处——压车,“压车到位”——靠车,“靠车到位”——当重调机大臂有抬臂动作或“抬臂到位”后——正翻,到165度停——靠板振动3秒——回翻,到0度停——松靠,“松靠到位”——松压,“松压到位”,至此翻车机一个动作周期完成。 就地操作时需要注意的事项: 1、压车时,要确认重车停在翻车机本体中心,车辆前后端未露出翻车机本体(即“单车溜出”灯未亮),而且重调机后钩已经与车辆车钩脱离。 2、靠车时,要确认翻车机压车梁确实已经压在车辆车帮上。 3、正翻时,要确认翻车机靠板确实已经靠在车辆上。
注塑机工作原理及构造
第一章 注塑机工作原理及构造 第一节 注塑机工作原理 一、注塑机工作原理 注塑成型机简称注塑机,其机械部分主要由注塑部件和合模部件组成。注塑部件主要由料筒和螺杆及注射油缸组成示意如图1-19所示。 注塑成型是用塑性 的热物理性质,把物料 从料斗加入料筒内,料筒外由加热圈加热,使物料熔融。在料筒内装有在外动力油马达作用下驱动旋转的螺杆。物料在螺杆的作用下,沿着螺槽向前输送并压实。物料在外加热和螺杆剪切的双重作用下逐渐的塑化、熔融和均化。当螺杆旋转时,物料在螺槽摩擦力及剪切力的作用下把已熔融的物料推到螺杆的头部,与此同时,螺杆在物料的反作用力作用下向后退,使螺杆头部形成储料空间,完成塑化过程。然后,螺杆在注射油缸活塞杆推力的作用下,以高速、高压,将储料室的熔融料通过喷嘴注射到模具的型腔中。型腔中的容料经过保压、冷却、固化定型后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制件从模具顶出落下。 塑料从固体料经料斗加入到料筒中,经过塑化熔融阶段,直到注射、保压、冷却、启模、顶出制品落下等过程,全是按着严格地自动化工作程序操作的,如图1-20所示。 1-模具 2-喷嘴 3-料筒 4-螺杆 5-加热圈 6-料斗 7-油马达 8-注射油缸 9-储料室 10-制件 11-顶杆 图1-19 注塑成型原理图 注射座动作选择
第二节 注塑机组成 注塑机根据注塑成型工艺要求是一个机电一体化很强的机种,主要由注塑部件、合模部件、机身、液压系统、加热系统、冷却系统、电气控制系统、加料装置等组成,如图1-21所示。 第二节注 塑 机 结 构 注塑机总体结构 公司目前主力机型为HTFX 系列,该机型主要可分为注射部分(01 注塑机 注塑部件 塑化装置 注射座 注射油缸 螺杆驱动装置 注射座油缸 螺杆 料筒 螺杆头 喷嘴 合模部件 合模装置 调模装置 制品顶出装置 机身 液压系统 泵、油马达、阀 蓄能器、冷却器、过滤装置 管路、压力表 冷却系统 入料口冷却、模具冷却 润滑系统 润滑装置、分配器 电器控制系统 动作程序控制;料筒温度控制;泵电机控制 安全保护;故障监测、报警;显示系统 机械手 加料装置 图1-21 注塑机组成示图
计算机的基本结构及工作原理
计算机的基本结构及工作原理 教学内容:计算机的基本结构及工作原理 教学目的:了解计算机的分类及其基本结构,知道计算机的基本工作原理。教学过程: 一、学生看书: 二、精讲及板书: 1、计算机的基本结构 2、计算机的基本工作原理 三、小结: 计算机的工作原理 四、练习: 计算机是怎样工作的? 计算机的工作真是ZYB重油煤焦油泵全自动的吗? 第6课时计算机的分类及计算机的文化 教学内容:计算机的分类及计算机的文化 教学目的:了解计算机的分类,了解计算机文化的主要特点。 教学过程: 一、学生看书: 二、精讲及板书: 1、计算机的分类: 按工作用途可以分为通用计算机和专用计算机 按工作原理可以分为数字计算机和模拟计算机 2、计算机文化 所谓计算机文化就是因为计保温沥青泵算机的产生与使用使人类社会的生存方式发生了根本变化从而产生的一种新的文化形态。 三、小结: 计算机分类和计算机文化 四、练习: 1、计算机是怎样分类的? 2、什么是计算机文化? 第7课时计算机的硬件系统和软件系统 教学内容:计算机的硬件系统和软件系统 教学目的:了解计算机的硬件的基本组成,能正确识别计算机上的主要部件,并知道其作用。教学过程: 一、学生看书: 二、精讲及板书: 三、小结: 计算机的硬件系统和软件系统 四、练习: 计算机的硬件系统由那几部份组成? 第8课时学会正确开、关机 教学内容:学会正确开、关机 教学目的和要求 学会开、关机 教学难点:1、了解计算机外设的开、关顺序
2、正确学会开、关机 教学准备:计算机、网络 教学过程: 一、教学导入 同学们,在你们面前看ZYB-B可调压式渣油泵到的是什么呀? 对了,是电脑。 老师告诉你们电脑现在正在睡觉,这个大懒虫,到现在还在睡觉,我们让小朋友把它喊醒,让他和小朋友们一起学习好不好? 二、教学新课 (一)教师示范讲解 在把电脑喊醒之前老师先考考小朋友们一个最最简单的问题,小朋友们早上醒来第一件事是干吗?老师再重复一遍,是第一件事。 刚才小朋友们说了很多,有的说穿衣服,有的小朋友说是洗脸,还有的小朋友说叠被子,但老师却不同意小朋友的意见,再好好想想,我们早上醒来的第一件事是做什么? 对了,首先是睁开眼睛,我们小朋友只有先睁开眼睛然后才能去穿衣服、洗脸、刷牙等等。电脑同样如此,它也要先睁开眼睛,然后才能和小朋友一起学习。所以第一步我们要让电脑睁开眼睛。怎么做? 1、教师示范开显示器,同时提醒电源指示灯的颜色变化 光睁开眼睛怎么行呢?,我KCB齿轮泵们的目的是让他和小朋友们一起做游戏,我们要让他动起来,那第二步我们应该怎么做?其实很简单,就是接通电源。 2、教师出示电源开关“POWER”标志,同时逐台电脑巡视开机情况 按下它之后,我们请小朋友们说一说你发现了什么?;左边的三个灯会同时闪一下,同时第一个灯变绿了,其;3、教师先展示几幅电脑作品,然后用“金山画王笔”;4、教师一步一步示范,手把手教学生关机,并重复几;小朋友早上起来的第一件事是3GR三螺杆泵睁开眼睛;5、教师示范关显示器;(二)、学生练习开、关电脑;在教师的组织下,有步骤的打开电脑和关闭电脑;教师巡视指导;第9 按下它之后,我们请小朋友们说一说你发现了什么? 左边的三个灯会同时闪一下,同时第一个灯变绿了,其它两个灯熄灭了。现在电脑就会和小朋友一起来学习了。比如说画画了 3、教师先展示几幅电脑作品,然后用“金山画王笔”给学生做示范。刚才我们让电脑给我们小朋友画了几幅画,它说他累了,我们还是让他休息吧,下面我们就先来学习如何关机。 4、教师一步一步示范,手把手教学生关机,并重复几次。 小朋友早上起来的第一件事是3GR三螺杆泵睁开眼睛,那上床后我们会把眼睛闭上。然后开始休息。电脑同样如此。我们最后也要让电脑把眼睛闭上,要不然电脑就休息不好,他会生气的。再次提醒小朋友,我们最后千万不要让电脑的睁着眼睛睡觉。记住了要把电脑的显示器关掉。 5、教师示范关显示器。 (二)、学生练习开、关电脑 在教师的组织下,有步骤的打开电脑和关闭电脑。 教师巡视指导。
注塑机工作中常见问题
注塑机的基本常识 1. 刚开机时产品跑披锋,生产一段时间后产品缺胶的原因及解决方案。 刚开机时注塑机料管内的熔胶由于加热时间长,熔胶粘度低,流动性好,产品易跑披锋,生产一段时间后由于熔胶不断把热量带走,造成熔胶不足,粘度大,流动性差,使产品缺胶。 在生产一段时间后,逐渐提高料管温度来解决。 2. 在生产过程中,产品缺胶,有时增大射胶压力和速度都无效,为什么?解决方法? 是因为生产中熔胶不断把热量带走,造成熔胶不足,胶粘度大,流动性差,使产品缺胶。 提高料管温度来解决。 3. 产品椭圆的原因及解决方法。 产品椭圆是由于入胶不均匀,造成产品四周压力不匀,使产品椭圆,采用三点入胶,使产品入胶均匀。 4. 精密产品对模具的要求。 要求模具材料刚性好,弹变形小,热涨性系数小。 5. 产品耐酸试验的目的 产品耐酸试验是为了检测产品内应力,和内应力着力点位置,以便消除产品内应力。 6. 产品中金属镶件受力易开裂的原因及解决方法。 产品中放镶件,在啤塑时由于热熔胶遇到冷镶件,会形成内应力,使产品强度下降,易开裂。 在生产时,对镶件进行预热处理。 7. 模具排气点的合理性与选择方法。 模具排气点不合理,非但起不到排气效果,反而会造成产品变形或尺寸变化,所以模具排气点要合理。
选择模具排气点,应在产品最后走满胶的地方和产品困气烧的地方开排气。 8. 产品易脆裂的原因及解决方法。 产品易脆裂是产品使用水口料和次料太多造成产品易脆裂,或是料在料管内停留时间过长,造成胶料老化,使产品易脆裂。 增加新料的比例,减少水口料回收使用次数,一般不能超过三次,避免胶料在料管内长时间停留。 9. 加玻纤产品易出现泛纤的原因及解决方法 是由于熔胶温度低或模具温度低,射胶压力不足,造成玻纤在胶内不能与塑胶很好的结合,使纤泛出。 加高熔胶温度,模具温度,增大射胶压力。 10. 进料口温度对产品的影响。 进料口温度的过高或过低,都会造成机器回料不稳定,使加料量不稳定,而影响产品的尺寸和外观。 11. 透明产品有白点的原因及解决方法。 透明产品有白点是因为产品内进入冷胶造成,或料内有灰尘造成的。 提高射嘴温度,加冷料井,原料注意保存,防止灰尘进入。 12. 什么是注塑机的射出能力? 射出能力※※=射出压力(kg/cm2)×射出容积(cm3)/1000 13. 什么是注塑机的射出马力? 射出马力PW(KW)=射出压力(kg/cm2)×射出率(cm3/sec)×9.8×100% 26. 球面丝印后开裂问题. 由于产品表面存在应力,造成丝印后开裂.增加模具温度,减小应力;可用退火的方法消除应力.
各种仪器分析及原理
化学专业学生必备:各种仪器分析的基本原理及谱图表示方法 紫外吸收光谱 UV 分析原理:吸收紫外光能量,引起分子中电子能级的跃迁 谱图的表示方法:相对吸收光能量随吸收光波长的变化 提供的信息:吸收峰的位置、强度和形状,提供分子中不同电子结构的信息荧光光谱法 FS 分析原理:被电磁辐射激发后,从最低单线激发态回到单线基态,发射荧光谱图的表示方法:发射的荧光能量随光波长的变化 提供的信息:荧光效率和寿命,提供分子中不同电子结构的信息 红外吸收光谱法 IR 分析原理:吸收红外光能量,引起具有偶极矩变化的分子的振动、转动能级跃迁 谱图的表示方法:相对透射光能量随透射光频率变化 提供的信息:峰的位置、强度和形状,提供功能团或化学键的特征振动频率拉曼光谱法 Ram 分析原理:吸收光能后,引起具有极化率变化的分子振动,产生拉曼散射 谱图的表示方法:散射光能量随拉曼位移的变化 提供的信息:峰的位置、强度和形状,提供功能团或化学键的特征振动频率核磁共振波谱法 NMR 分析原理:在外磁场中,具有核磁矩的原子核,吸收射频能量,产生核自旋能级的跃迁 谱图的表示方法:吸收光能量随化学位移的变化 提供的信息:峰的化学位移、强度、裂分数和偶合常数,提供核的数目、所处化学环境和几何构型的信息 电子顺磁共振波谱法 ESR 分析原理:在外磁场中,分子中未成对电子吸收射频能量,产生电子自旋能级跃迁 谱图的表示方法:吸收光能量或微分能量随磁场强度变化 提供的信息:谱线位置、强度、裂分数目和超精细分裂常数,提供未成对电子密度、分子键特性及几何构型信息 质谱分析法 MS 分析原理:分子在真空中被电子轰击,形成离子,通过电磁场按不同m/e分离谱图的表示方法:以棒图形式表示离子的相对峰度随m/e的变化 提供的信息:分子离子及碎片离子的质量数及其相对峰度,提供分子量,元素组成及结构的信息 气相色谱法 GC 分析原理:样品中各组分在流动相和固定相之间,由于分配系数不同而分离谱图的表示方法:柱后流出物浓度随保留值的变化 提供的信息:峰的保留值与组分热力学参数有关,是定性依据;峰面积与组分含量有关 反气相色谱法 IGC 分析原理:探针分子保留值的变化取决于它和作为固定相的聚合物样品之间的相互作用力 谱图的表示方法:探针分子比保留体积的对数值随柱温倒数的变化曲线
心电监护操作步骤及注意事项
核对医嘱与执行单 T 检查用物 T 洗手,戴口罩 T 携用物至床旁 T 核对床头卡与 腕带T 口 述:XX 你好,感觉怎么样?(病人回答:有些胸闷)遵医嘱现在要给您进行心电 监护,心电监护的目的是为了监测您的心率、血压、血氧饱和度和呼吸的变化,动态的信息, 观察您的病情,操作前请让我看一下您的皮肤 T 遮挡屏风 胸部)T 口述:患者皮肤完整无破损, 无红肿、炎症及溃疡 我现在要使用监护仪给您进行心电监护了,您 准备好了吗? 开开关,检查导联线,口述:心电监护仪各导联线连 接紧密 后对病人口述:XX 连接前请让我先清洁一下您的皮肤T 清洁手指, 接血氧探头 皮肤(五个位置) T 接导联线 T 挽起患者袖子,触摸 到肱动脉定位 T 缠袖带(松紧以放入 一指为宜)T 为病人盖好被子,口述:能告诉我您的名字吗?(操作中核对)T 调节参数(心 率、脉搏、血氧饱和度、血压、呼吸、报警音量)T 记录测量的各项数值,并将心电监护单 挂于床尾 T 调节完毕后再次核对病人姓名及腕带 T 整理病人,同时口述:您这个姿势舒服 吗? T 整理好后口述注意事项:XX 心电监护仪我已经给您连接好了,测量的数值均在正常 范围内,请您不要担心。检测过程中请您不要自行移动或触及电极片,以免影响监测结果。 翻身活动时不要牵拉导联线,以免引起导联线脱落、打折,请您和您的家人不要在监护仪附 近使用手机,请保持监护仪周围清洁干燥。如果感觉电极片周围的皮肤有痒感或者不舒服的 话,请您及时告诉我,当监护仪出现报警时请您不要紧张、不要自行调节,请您及时按床头 铃,我将床头铃放在您的枕边,您先休息,我一会儿会过来看您,谢谢你的配合 T 收起屏风 T (病人病情稳定,需要撤除监护仪)口述: XX 您好,您的病情比较稳定,(测量血压)血 压值…..心率….,血氧饱和度….,呼吸….,现在我帮您撤除监护仪 T 遮挡屏风T 关闭电 源T 先撤袖带T 再撤血氧饱和度T 最后撤除电极片,清洁患者胸部皮肤 T 帮患者整理, 同时口述:您这个姿势舒服吗? T 拔除电源线 T 收起屏风,取回心电监护单 T 向病人口述: 谢谢您的配合,再见T 推回治疗车 T 用物处理 T 洗手 T 记录最后一次测量数值 T 执行单 记录。 操作时注意事项: ( 1)用物准备时需要三块纱布。接血氧探头之前清洁患者指端一块,安放 电极片前清洁皮肤一块,去除电极片后清洁皮肤一块。 (2)连接血氧饱和度探头时,使红外 线光源对准指甲,不要与袖带在同侧,否则会影响血氧值。 (3)连接血压计袖带时,不要与 静脉输液在同侧。 (4)调节患者血压参数之前,要先给病人测量一次血压,并根据患者血压 调节报警上下限。 (5)在撤除患者心电监护之后,洗手记录时,还要将患者最后一次测量的 数值记录在心电监护记录单上。 ( 6)监护仪及各导联线、袖带的用后清洁消毒,请参照医院 最新清洁消毒方法。 T 查看患者皮肤(肘部、手指、 f 给患者盖好被子 T 口述:XX, T (患者同意后)连接电源,打 T 接电极片 T 接好电极片放好 T 清洁胸部
计算机的工作过程
计算机基本构成模式 计算机应包括运算器、存储器、控制器、输入设备和输出设备五大基本部件 计算机中数的表示 计算机内部应采用二进制表示指令和数据 计算机的工作原理 计算机系统应按照下述模式工作:将编好的程序和原始数据,输入并存储在计算机的内存储器中(即“存储程序”);计算机按照程序逐条取出指令加以分析,并执行指令规定的操作(即“程序控制”)。这一原理称为“存储程序”原理,是现代计算机的基本工作原理,至今的计算机仍采用这一原理。 计算机的工作原理 按照冯·诺依曼存储程序的原理,计算机在执行程序时须先将要执行的相关程序和数据放入内存储器中,在执行程序时CPU根据当前程序指针寄存器的内容取出指令并执行指令,然后再取出下一条指令并执行,如此循环下去直到程序结束指令时才停止执行。其工作过程就是不断地取指令和执行指令的过程,最后将计算的结果放入指令指定的存储器地址中。计算机工作过程中所要涉及的计算机硬件部件有内存储器、指令寄存器、指令译码器、计算器、控制器、运算器和输入/输出设备等,在以后的内容中将会着重介绍。 (一)计算机硬件系统 硬件通常是指构成计算机的设备实体。一台计算机的硬件系统应由五个基本部分组成:运算器、控制器、存储器、输入和输出设备。这五大部分通过系统总线完成指令所传达的操作,当计算机在接受指令后,由控制器指挥,将数据众输入设备传送到存储器存放,再由控制器将需要参加运算的数据传送到运算器,由运算器进行处理,处理后的结果由输出设备输出。 中央处理器 CPU(central processing unit)意为中央处理单元,又称中央处理器。CPU由控制器、运算器和寄存器组成,通常集中在一块芯片上,是计算机系统的核心设备。计算机以CPU为中心,输入和输出设备与存储器之间的数据传输和处理都通过CPU来控制执行。微型计算机的中央处理器又称为微处理器。 控制器 控制器是对输入的指令进行分析,并统一控制计算机的各个部件完成一定任务的部件。它一般由指令寄存器、状态寄存器、指令译码器、时序电路和控制电路组成。计算机的工作方式是执行程序,程序就是为完成某一任务所编制的特定指令序列,各种指令操作按一定的时间关系有序安排,控制器产生各种最基本的不可再分的微操作的命令信号,即微命令,以指挥整个计算机有条不紊地工作。当计算机执行程序时,控制器首先从指令指针寄存器中取得指令的地址,并将下一条指令的地址存入指令寄存器中,然后从存储器中取出指令,由指令译码器对指令进行译码后产生控制信号,用以驱动相应的硬件完成指纹操作。简言之,控制器就是协调指挥计算机各部件工作的元件,它的基本任务就是根据种类指纹的需要综合有关的逻辑条件与时间条件产生相应的微命令。 运算器 运算器又称积极态度逻辑单元ALU(Arithmetic Logic Unit)。运算器的主要任务是执行各种算术运算和逻辑运算。算术运算是指各种数值运算,比如:加、减、乘、除等。逻辑运算是进行逻辑判断的非数值运算,比如:与、或、非、比较、移位等。计算机所完成的全部运算都是在运算器中进行的,根据指令规定的寻址方式,运算器从存储或寄存器中取得操作数,进行计算后,送回到指令所指定的寄存
口腔护理操作步骤及注意事项
口腔护理、会阴护理的步骤用物及注意事项 口腔护理 物品: 治疗碗、弯止血铅、压舌板、吸收管、治疗巾、开口器、外用药、漱口溶液浸湿的棉球、镊子、弯盘、液状石蜡、小茶壶或内盛温开水、手电筒、漱口液 操作步骤: 1、核对床号、姓名、向患者、家属解释进行口腔护理的目的、过程及合作方法 2、洗手后根据病情准本用物,将用物携至床边,再次核对床号、姓名 3、协助患者移近护士,侧卧,面向护士,治疗巾铺于颌下,弯盘放于口角旁 4、先湿润口唇,用压舌板轻轻撑开颊部,昏迷患者或牙关紧闭者用开口器打开并固定,借助手电筒的光线评估口强情况 5、协助患者用温开水漱口后,嘱患者张口,用压舌板轻轻撑开一侧颊部,用弯血管钳夹持含有漱口溶液的棉球,依次由内向外沿牙缝纵向擦洗上牙列外侧面、内侧面、咬合面,下牙列外侧面、内侧面、咬合面,再弧形擦洗颊部;同法擦洗对侧。 6、擦洗硬腭部、舌面及舌下,最后再擦洗口唇。 7、擦洗完毕,帮助患者漱口,用治疗巾拭去口角处水渍;清点棉球。
8、口腔黏膜如有溃疡,酌情涂药于溃疡处;口唇干裂者涂以液体石蜡。 9、协助患者采取舒适卧位;整理床单位、清理用物。 注意事项 1、操作前室内停止清扫等工作,避免尘埃飞扬;如无菌物品已过期或不慎被污染,则不可使用;一套无菌物品只能供一个人使用,以防发生交叉感染。 2、操作前后清点棉球个数,防止遗留在口腔内,堵塞呼吸道。 3、擦洗时,每次夹取一个棉球,夹紧,棉球不宜过湿,以免因吸入溶液引起呛咳等意外。 4、擦洗时动作要轻缓,以免碰伤黏膜及牙龈。牙垢较多处可再取一个棉球擦洗,直至擦净。 5、昏迷、意识不清醒的老人禁止漱口,需用张口器时应从臼齿处放入,再慢慢撑开,不可强制撬开。 6、对于长期使用抗生素的老人,应注意观察口腔有无霉菌感染。 7、绿脓杆菌感染者的用物按消毒隔离制度处理,污敷料应焚毁。
(AFM)原子力显微镜原理介绍
原子力显微镜(AFM)原理 一、原理 原子力显微镜(Atomic Force Microscopy, AFM)是由IBM公司的Binnig与史丹佛大学的Quate于一九八五年所发明的,其目的是为了使非导体也可以采用扫描探针显微镜(SPM)进行观测。 图1、原子与原子之间的交互作用力因为彼此之间的距离 的不同而有所不同,其之间的能量表示也会不同。 原子力显微镜(AFM)与扫描隧道显微镜(STM)最大的差别在于并非利用电子隧道效应,而是利用原子之间的范德华力(Van Der Waals Force)作用来呈现样品的表面特性。假设两个原子中,一个是在悬臂(cantilever)的探针尖端,另一个是在样本的表面,它们之间的作用力会随距离的改变而变化,其作用力与距离的关系如“图1”所示,当原子与原子很接近时,彼此电子云斥力的作用大于原子核与电子云之间的吸引力作用,所以整个合力表现为斥力的作用,反之若两原子分开有一定距离时,其电子云斥力的作
用小于彼此原子核与电子云之间的吸引力作用,故整个合力表现为引力的作用。若以能量的角度来看,这种原子与原子之间的距离与彼此之间能量的大小也可从Lennard –Jones的公式中到另一种印证。 为原子的直径为原子之间的距离 从公式中知道,当r降低到某一程度时其能量为+E,也代表了在空间中两个原子是相当接近且能量为正值,若假设r增加到某一程度时,其能量就会为-E同时也说明了空间中两个原子之间距离相当远的且能量为负值。不管从空间上去看两个原子之间的距离与其所导致的吸引力和斥力或是从当中能量的关系来看,原子力显微镜就是利用原子之间那奇妙的关系来把原子样子给呈现出来,让微观的世界不再神秘。 在原子力显微镜的系统中,是利用微小探针与待测物之间交互作用力,来呈现待测物的表面之物理特性。所以在原子力显微镜中也利用斥力与吸引力的方式发展出两种操作模式: (1)利用原子斥力的变化而产生表面轮廓为接触式原子力显微镜(contact AFM),探针与试片的距离约数个?。 (2)利用原子吸引力的变化而产生表面轮廓为非接触式原子力显微镜(non-contact AFM),探针与试片的距离约数十到数百?。 二、原子力显微镜的硬件架构: 在原子力显微镜(Atomic Force Microscopy,AFM)的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。
计算机的基本工作原理
计算机的基本工作原理 计算机的工作原理 1、冯诺依曼原理 “存储程序控制”原理是1946年由美籍匈牙利数学家冯诺依曼提出的,所以又称为“冯诺依曼原理”。该原理确立了现代计算机的基本组成的工作方式,直到现在,计算机的设计与制造依然沿着“冯诺依曼”体系结构。 2、“存储程序控制”原理的基本内容 ①采用二进制形式表示数据和指令。 ②将程序(数据和指令序列)预先存放在主存储器中(程序存储),使计算机在工作时能够自动高速地从存储器中取出指令,并加以执行(程序控制)。 ③由运算器、控制器、存储器、输入设备、输出设备五大基本部件组成计算机硬件体系结构。 3、计算机工作过程 第一步:将程序和数据通过输入设备送入存储器。 第二步:启动运行后,计算机从存储器中取出程序指令送到控制器去识别,分析该指令要做什么事。 第三步:控制器根据指令的含义发出相应的命令(如加法、减法),将存储单元中存放的操作数据取出送往运算器进行运算,再把运算结果送回存储器指定的单元中。 第四步:当运算任务完成后,就可以根据指令将结果通过输出设备输出。 计算机的软件分类 计算机软件是指计算机运行、管理、应用和维护所需的各种程序、数据及其有关技术文档资料。只有硬件没有软件的计算机称为“裸机”,裸机只能运行由 0 和1 组成的机器语言程序,没有软件系统的计算机几乎是没有用的。通常人们使用的计算机是经过软件“包装”的计算机,计算机的功能不仅仅取决于硬件系统,更大程度上由所安装的软件系统来决定。 软件种类繁多,通常根据软件用途可将其分为系统软件和应用软件。系统软件是用于管理、控制和维护计算机系统资源的软件,主要包括操作系统、语言处理程序、数据库管理系统和服务程序等。应用软件是针对某一应用而开发的软件,可分为通用应用软件和专用应用软件。 1.2.4 计算机系统的层次结构 在一个完整的计算机系统中,计算机硬件和软件之间是有一定的层次关系的,如图 1-3 所示。计算机硬件位于是最低层,是计算机系统的基础。操作系统位于硬件之上,而操作系统的上一层为其他系统软件和应用软件,最高层是用户程序或文档。 用户程序或文档