HMM学习最佳范例

HMM学习最佳范例
作者:52nlp(52nlpcn@https://www.sodocs.net/doc/a011291453.html,)
我爱自然语言处理:https://www.sodocs.net/doc/a011291453.html,
一、介绍(Introduction)
我们通常都习惯寻找一个事物在一段时间里的变化模式(规律)。这些模式发生在很多领域,比如计算机中的指令序列,句子中的词语顺序和口语单词中的音素序列等等,事实上任何领域中的一系列事件都有可能产生有用的模式。
考虑一个简单的例子,有人试图通过一片海藻推断天气——民间传说告诉我们‘湿透的’海藻意味着潮湿阴雨,而‘干燥的’海藻则意味着阳光灿烂。如果它处于一个中间状态(‘有湿气’),我们就无法确定天气如何。然而,天气的状态并没有受限于海藻的状态,所以我们可以在观察的基础上预测天气是雨天或晴天的可能性。另一个有用的线索是前一天的天气状态(或者,至少是它的可能状态)——通过综合昨天的天气及相应观察到的海藻状态,我们有可能更好的预测今天的天气。
这是本教程中我们将考虑的一个典型的系统类型。
首先,我们将介绍产生概率模式的系统,如晴天及雨天间的天气波动。
然后,我们将会看到这样一个系统,我们希望预测的状态并不是观察到的——其底层系统是隐藏的。在上面的例子中,观察到的序列将是海藻而隐藏的系统将是实际的天气。
最后,我们会利用已经建立的模型解决一些实际的问题。对于上述例子,我们想知道:
1. 给出一个星期每天的海藻观察状态,之后的天气将会是什么?
2. 给定一个海藻的观察状态序列,预测一下此时是冬季还是夏季?直观地,如果一段时间内海藻都是干燥的,那么这段时间很可能是夏季,反之,如果一段时间内海藻都是潮湿的,那么这段时间可能是冬季。
二、生成模式(Generating Patterns)
1、确定性模式(Deterministic Patterns)
考虑一套交通信号灯,灯的颜色变化序列依次是红色-红色/黄色-绿色-黄色-红色。这个序列可以作为一个状态机器,交通信号灯的不同状态都紧跟着上一个状态。
注意每一个状态都是唯一的依赖于前一个状态,所以,如果交通灯为绿色,那么下一个颜色状态将始终是黄色——也就是说,该系统是确定性的。确定性系统相对比较容易理解和分析,因为状态间的转移是完全已知的。
2、非确定性模式(Non-deterministic patterns)
为了使天气那个例子更符合实际,加入第三个状态——多云。与交通信号灯例子不同,我们并不期望这三个天气状态之间的变化是确定性的,但是我们依然希望对这个系统建模以便生成一个天气变化模式(规律)。
一种做法是假设模型的当前状态仅仅依赖于前面的几个状态,这被称为马尔科夫假设,它极大地简化了问题。显然,这可能是一种粗糙的假设,并且因此可能将一些非常重要的信息丢失。
当考虑天气问题时,马尔科夫假设假定今天的天气只能通过过去几天已知的天气情况进行预测——而对于其他因素,譬如风力、气压等则没有考虑。在这个例子 以及其他相似的例子中,这样的假设显然是不现实的。然而,由于这样经过简化的系统可以用来分析,我们常常接受这样的知识假设,虽然它产生的某些信息不完全 准确。
一个马尔科夫过程是状态间的转移仅依赖于前n个状态的过程。这个过程被称之为n阶马尔科夫模型,其中n是影响下一个状态选择的(前)n个状态。最简单 的马尔科夫过程是一阶模型,它的状态选择仅与前一个状态有关。这里要注意它与确定性系统并不相同,因为下一个状态的选择由相应的概率决定,并不是确定性 的。
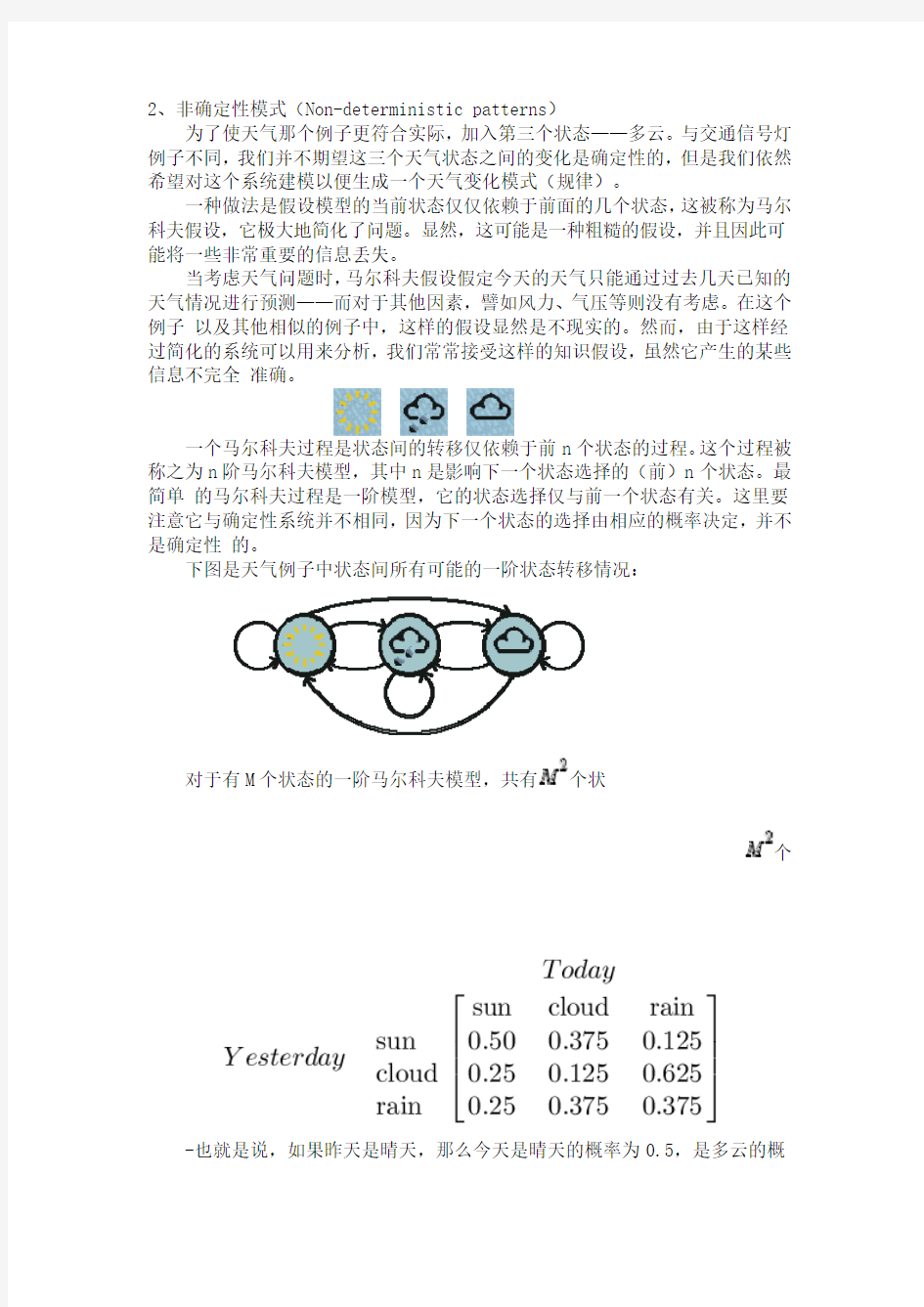
下图是天气例子中状态间所有可能的一阶状态转移情况:
对于有M个状态的一阶马尔科夫模型,共有个状
个
-也就是说,如果昨天是晴天,那么今天是晴天的概率为0.5,是多云的概
率为0.375。注意,每一行的概率之和为1。
要初始化这样一个系统,我们需要确定起始日天气的(或可能的)情况,定
义其为一个初始概率向量,称为向量。
-也就是说,第一天为晴天的概率为1。
现在我们定义一个一阶马尔科夫过程如下:
状态:三个状态——晴天,多云,雨天。
向量:定义系统初始化时每一个状态的概率。
状态转移矩阵:给定前一天天气情况下的当前天气概率。
任何一个可以用这种方式描述的系统都是一个马尔科夫过程。
3、总结
我们尝试识别时间变化中的模式,并且为了达到这个目我们试图对这个过程建模以便产生这样的模式。我们使用了离散时间点、离散状态以及做了马尔科夫假设。在采用了这些假设之后,系统产生了这个被描述为马尔科夫过程的模式,
它包含了一个向量(初始概率)和一个状态转移矩阵。关于假设,重要的一点
是状态转移矩阵并不随时间的改变而改变——这个矩阵在整个系统的生命周期中是固定不变的。
三、隐藏模式(Hidden Patterns)
1、马尔科夫过程的局限性
在某些情况下,我们希望找到的模式用马尔科夫过程描述还显得不充分。回顾一下天气那个例子,一个隐士也许不能够直接获取到天气的观察情况,但是他有一些水藻。民间传说告诉我们水藻的状态与天气状态有一定的概率关系——天气和水藻的状态是紧密相关的。在这个例子中我们有两组状态,观察的状态(水藻的状态)和隐藏的状态(天气的状态)。我们希望为隐士设计一种算法,在不能够直接观察天气的情况下,通过水藻和马尔科夫假设来预测天气。
一个更实际的问题是语音识别,我们听到的声音是来自于声带、喉咙大小、舌头位置以及其他一些东西的组合结果。所有这些因素相互作用产生一个单词的声音,一套语音识别系统检测的声音就是来自于个人发音时身体内部物理变化所引起的不断改变的声音。
一些语音识别装置工作的原理是将内部的语音产出看作是隐藏的状态,而将声音结果作为一系列观察的状态,这些由语音过程生成并且最好的近似了实际(隐 藏)的状态。在这两个例子中,需要着重指出的是,隐藏状态的数目与观察状态的数目可以是不同的。一个包含三个状态的天气系统(晴天、多云、雨天)中,可以 观察到4个等级的海藻湿润情况(干、稍干、潮湿、湿润);纯粹的语音可以由80个音素描述,而身体的发音系统会产生出不同数目的声音,或者比80多,或者 比80少。
在这种情况下,观察到的状态序列与隐藏过程有一定的概率关系。我们使用隐马尔科夫模型对这样的过程建模,这个模型包含了一个底层隐藏的随时间改变的马尔科夫过程,以及一个与隐藏状态某种程度相关的可观察到的状态集合。
2、隐马尔科夫模型(Hidden Markov Models)
下图显示的是天气例子中的隐藏状态和观察状态。假设隐藏状态(实际的天气)由一个简单的一阶马尔科夫过程描述,那么它们之间都相互连接。
隐藏状态和观察状态之间的连接表示:在给定的马尔科夫过程中,一个特定的隐藏状态生成特定的观察状态的概率。这很清晰的表示了‘进入’一个观察状态的 所有概率之和为1,在上面这个例子中就是Pr(Obs|Sun), Pr(Obs|Cloud) 及 Pr(Obs|Rain)之和。(对这句话我有点疑惑?)
除了定义了马尔科夫过程的概率关系,我们还有另一个矩阵,定义为混淆矩阵(confusion matrix),它包含了给定一个隐藏状态后得到的观察状态的概率。对于天气例子,混淆矩阵是:
注意矩阵的每一行之和是1。
3、总结(Summary)
我们已经看到在一些过程中一个观察序列与一个底层马尔科夫过程是概率相关的。在这些例子中,观察状态的数目可以和隐藏状态的数码不同。
我们使用一个隐马尔科夫模型(HMM)对这些例子建模。这个模型包含两组状态集合和三组概率集合:
* 隐藏状态:一个系统的(真实)状态,可以由一个马尔科夫过程进行描述(例如,天气)。
* 观察状态:在这个过程中‘可视’的状态(例如,海藻的湿度)。
* 向量:包含了(隐)模型在时间t=1时一个特殊的隐藏状态的概率(初
始概率)。
* 状态转移矩阵:包含了一个隐藏状态到另一个隐藏状态的概率
* 混淆矩阵:包含了给定隐马尔科夫模型的某一个特殊的隐藏状态,观察到的某个观察状态的概率。
因此一个隐马尔科夫模型是在一个标准的马尔科夫过程中引入一组观察状态,以及其与隐藏状态间的一些概率关系。
四、隐马尔科夫模型(Hidden Markov Models)
1、定义(Definition of a hidden Markov model)
一个隐马尔科夫模型是一个三元组(, A, B)。
:初
:状态转移矩阵;
:混淆矩阵;
,A,B)三元组的集合)及一个观察序列。我们想知道哪一个HMM最有可能产
生了这个给定的观察序列。例如,对于海藻来说,我们也许会有一个“夏季”模型和一个“冬季”模型,因为不同季节之间的情况是不同的——我们也许想根据海藻湿度的观察序列来确定当前的季节。
我们使用前向算法(forward algorithm)来计算给定隐马尔科夫模型(HMM)后的一个观察序列的概率,并因此选择最合适的隐马尔科夫模型(HMM)。
在语音识别中这种类型的问题发生在当一大堆数目的马尔科夫模型被使用,并且每一个模型都对一个特殊的单词进行建模时。一个观察序列从一个发音单词中形成,并且通过寻找对于此观察序列最有可能的隐马尔科夫模型(HMM)识别这个单词。
b) 解码( Decoding)
给定观察序列搜索最可能的隐藏状态序列。
另一个相关问题,也是最感兴趣的一个,就是搜索生成输出序列的隐藏状态
序列。在许多情况下我们对于模型中的隐藏状态更感兴趣,因为它们代表了一些更有价值的东西,而这些东西通常不能直接观察到。
考虑海藻和天气这个例子,一个盲人隐士只能感觉到海藻的状态,但是他更想知道天气的情况,天气状态在这里就是隐藏状态。
我们使用Viterbi 算法(Viterbi algorithm)确定(搜索)已知观察序列及HMM下最可能的隐藏状态序列。
Viterbi算法(Viterbi algorithm)的另一广泛应用是自然语言处理中的词性标注。在词性标注中,句子中的单词是观察状态,词性(语法类别)是隐藏状态(注意对于许多单 词,如wind,fish拥有不止一个词性)。对于每句话中的单词,通过搜索其最可能的隐藏状态,我们就可以在给定的上下文中找到每个单词最可能的词性标 注。
C)学习(Learning)
根据观察序列生成隐马尔科夫模型。
第三个问题,也是与HMM相关的问题中最难的,根据一个观察序列(来自于已知的集合),以及与其有关的一个隐藏状态集,估计一个最合适的隐马尔科夫
模型(HMM),也就是确定对已知序列描述的最合适的(,A,B)三元组。
当矩阵A和B不能够直接被(估计)测量时,前向-后向算法
(forward-backward algorithm)被用来进行学习(参数估计),这也是实际应用中常见的情况。
3、总结(Summary)
由一个向量和两个矩阵(,A,B)描述的隐马尔科夫模型对于实际系统有着
巨大的价值,虽然经常只是一种近似,但它们却是经得起分析的。隐马尔科夫模型通常解决的问题包括:
1. 对于一个观察序列匹配最可能的系统——评估,使用前向算法(forward algorithm)解决;
2. 对于已生成的一个观察序列,确定最可能的隐藏状态序列——解码,使用Viterbi 算法(Viterbi algorithm)解决;
3. 对于已生成的观察序列,决定最可能的模型参数——学习,使用前向-后向算法(forward-backward algorithm)解决。
五、前向算法(Forward Algorithm)
计算观察序列的概率(Finding the probability of an observed sequence) 1.穷举搜索( Exhaustive search for solution)
给定隐马尔科夫模型,也就是在模型参数(, A, B)已知的情况下,我们
想找到观察序列的概率。还是考虑天气这个例子,我们有一个用来描述天气及与它密切相关的海藻湿度状态的隐马尔科夫模型(HMM), 另外我们还有一个海藻的湿度状态观察序列。假设连续3天海藻湿度的观察结果是(干燥、湿润、湿透)——而这三天每一天都可能是晴天、多云或下雨,对于观察 序列以及隐藏的状态,可以将其视为网格:
网格中的每一列都显示了可能的的天气状态,并且每一列中的每个状态都与相邻列中的每一个状态相连。而其状态间的转移都由状态转移矩阵提供一个概率。在每一列下面都是某个时间点上的观察状态,给定任一个隐藏状态所得到的观察状态的概率由混淆矩阵提供。
可以看出,一种计算观察序列概率的方法是找到每一个可能的隐藏状态,并且将这些隐藏状态下的观察序列概率相加。对于上面那个(天气)例子,将有
3^3 = 27种不同的天气序列可能性,因此,观察序列的概率是: Pr(dry,damp,soggy | HMM) = Pr(dry,damp,soggy | sunny,sunny,sunny) + Pr(dry,damp,soggy | sunny,sunny ,cloudy) + Pr(dry,damp,soggy | sunny,sunny ,rainy) + . . . . Pr(dry,damp,soggy | rainy,rainy ,rainy) 用这种方式计算观察序列概率极为昂贵,特别对于大的模型或较长的序列,因此我们可以利用这些概率的时间不变性来减少问题的复杂度。
2.使用递归降低问题复杂度
给定一个隐马尔科夫模型(HMM),我们将考虑递归地计算一个观察序列的概率。我们首先定义局部概率(partial probability),它是到达网格中的某个中间状态时的概率。然后,我们将介绍如何在t=1和t=n(>1)时计算这些局部概率。
假设一个T-长观察序列是:
’s)
考虑下面这个网格,它显示的是天气状态及对于观察序列干燥,湿润及湿透的一阶状态转移情况:
我们可以将计算到达网格中某个中间状态的概率作为所有到达这个状态的可能路径的概率求和问题。
例如,t=2时位于“多云”状态的局部概率通过如下路径计算得出:
我们定义t时刻位于状态j的局部概率为at(j)——这个局部概率计算如下:
t ( j )= Pr( 观察状态 | 隐藏状态j ) x Pr(t时刻所有指向j状态的路径)
对于最后的观察状态,其局部概率包括了通过所有可能的路径到达这些状态的概率——例如,对于上述网格,最终的局部概率通过如下路径计算得出:
由此可见,对于这些最终局部概率求和等价于对于网格中所有可能的路径概率求和,也就求出了给定隐马尔科夫模型(HMM)后的观察序列概率。
第3节给出了一个计算这些概率的动态示例。
2b.计算t=1时的局部概率’s
我们按如下公式计算局部概率:
t ( j )= Pr( 观察状态 | 隐藏状态j ) x Pr(t时刻所有指向j状态的路径)
特别当t=1时,没有任何指向当前状态的路径。故t=1时位于当前状态的概
率是初始概率,即Pr(state|t=1)=P(state),因此,t=1时的局部概率等于当前状态的初始概率乘以相关的观察概率:
’s
我们再次回顾局部概率的计算公式如下:
t ( j )= Pr( 观察状态 | 隐藏状态j ) x Pr(t时刻所有指向j状态的路径)
我们可以假设(递归地),乘号左边项“Pr( 观察状态 | 隐藏状态j )”已经有了,现在考虑其右边项“Pr(t时刻所有指向j状态的路径)”。
为了计算到达某个状态的所有路径的概率,我们可以计算到达此状态的每条路径的概率并对它们求和,例如:
计算所需要的路径数目随着观察序列的增加而指数级递增,但是t-1时刻’s给出了所有到达此状态的前一路径概率,因此,我们可以通过t-1时刻的局部概率定义t时刻的’s,即:
故我们所计算的这个概率等于相应的观察概率(亦即,t+1时在状态j所观察到的符号的概率)与该时刻到达此状态的概率总和——这来自于上一步每一个局部概率的计算结果与相应的状态转移概率乘积后再相加——的乘积。
注意我们已经有了一个仅利用t时刻局部概率计算t+1时刻局部概率的表达式。
现在我们就可以递归地计算给定隐马尔科夫模型(HMM)后一个观察序列的概率了——即通过t=1时刻的局部概率’s计算t=2时刻的’s,通过t=2时刻的’s计算t=3时刻的’s等等直到t=T。给定隐马尔科夫模型(HMM)的观察序列的概率就等于t=T时刻的局部概率之和。
2d.降低计算复杂度
我们可以比较通过穷举搜索(评估)和通过递归前向算法计算观察序列概率的时间复杂度。
我们有一个长度为T的观察序列O以及一个含有n个隐藏状态的隐马尔科夫
模型l=(,A,B)。
穷举搜索将包括计算所有可能的序列:
对我们所观察到的概率求和——注意其复杂度与T成指数级关系。相反的,使用前向算法我们可以利用上一步计算的信息,相应地,其时间复杂度与T成线性关系。
注:穷举搜索的时间复杂度是,,
)。
我们首先通过计算局部概率(’s)降低计算整个概率的复杂度,局部概率表示的是t时刻到达某个状态s的概率。
t=1时,可以利用初始概率(来自于P向量)和观察概率
Pr(observation|state)(来自于混淆矩阵)计算局部概率;而t>1时的局部概率可以利用t-时的局部概率计算。
因此,这个问题是递归定义的,观察序列的概率就是通过依次计算
t=1,2,…,T时的局部概率,并且对于t=T时所有局部概率’s相加得到的。
注意,用这种方式计算观察序列概率的时间复杂度远远小于计算所有序列的概率并对其相加(穷举搜索)的时间复杂度。
我们使用前向算法计算T长观察序列的概率:
其中y的每一个是观察集合之一。局部(中间)概率(’s)是递归计算的,首先通过计算t=1时刻所有状态的局部概率:
然后在每个时间点,t=2,… ,T时,对于每个状态的局部概率,由下式计算局部概率:
也就是当前状态相应的观察概率与所有到达该状态的路径概率之积,其递归地利用了上一个时间点已经计算好的一些值。
最后,给定HMM,,观察序列的概率等于T时刻所有局部概率之和:
再重复说明一下,每一个局部概率(t > 2 时)都由前一时刻的结果计算得出。
对于“天气”那个例子,下面的图表显示了t = 2为状态为多云时局部概率的计算过程。这是相应的观察概率b 与前一时刻的局部概率与状态转移概率a 相乘后的总和再求积的结果:
总结(Summary)
我们使用前向算法来计算给定隐马尔科夫模型(HMM)后的一个观察序列的概率。它在计算中利用递归避免对网格所有路径进行穷举计算。
给定这种算法,可以直接用来确定对于已知的一个观察序列,在一些隐马尔科夫模型(HMMs)中哪一个HMM 最好的描述了它——先用前向算法评估每一个(HMM),再选取其中概率最高的一个。
首先需要说明的是,本节不是这个系列的翻译,而是作为前向算法这一章的补充,希望能从实践的角度来说明前向算法。除了用程序来解读hmm的前向算法外,还希望将原文所举例子的问题拿出来和大家探讨。
文中所举的程序来自于UMDHMM这个C语言版本的HMM工具包,具体见《几种不同程序语言的HMM版本》。先说明一下UMDHMM这个包的基本情况,在linux环境下,进入umdhmm-v1.02目录,“make all”之后会产生4个可执行文件,分别是: genseq symbol sequence using the specified model sequence using the specified model)
testf : 利用一个给定的隐马尔科夫模型产生一个符号序列(Generates a or : 利用前向算法计算log Prob(观察序列| HMM模型)(Computes log
Prob(observation|model) using the Forward algorithm.) testvit : 对于给定的观察符号序列及HMM,利用Viterbi 算法隐藏状态序列(Generates the most like state sequence for a given symbol sequence, given the HMM, using Viterbi)
esthmm : 对于给定的观察符号序列,利用Ba 型HMM(Estimates the HMM from a given symbol sequence using BaumWelch)。 这些可执行文件需要读入有固定格式的HMM文件及观察符号序列文件,格式要求及举例如下: HMM 文件格式:—————————— M= number of symbols N= number of states A:
a11 a a21 a22 … a2N . . . . . . . . . . . .
aN1 aN2 … B:
b11 b b21 b22 … b2M . . . . . . . . . . . .
bN1 bN2 (i)
pi1 p ————————————生成最可能的umWelch算法学习隐马尔科夫模
————————————– 12 ... a1N aNN 12 ... b1M bNM i2 (i)
——————————– HMM 文件举例:
————————————– 0.333 0.333 .5 —————————— M= 2 N= 3 A:
0.333 0.333 0.333 0.333 0.333 0.333 0.333 B:
0.5 0 0.75 0.25 0.25 0.75 pi:
0.333 0.333 0.333 ——————————————————————–
观察序列文件格式:
——————————————————————–
T=seqence length
o1 o2 o3 . . . oT ——————————————————————–
观察序列文件举例:
——————————————————————–
T= 10
1 1 1 1
2 1 2 2 2 2 ——————————————————————–
对于前向算法的测试程序testfor来说,运行:
testfor model.hmm(HMM文件) obs.seq(观察序列文件) 就可以得到观察序列的概率结果的对数值,这里我们在testfor.c的第58行对数结果的输出下再加一行输出:
fprintf(stdout, “prob(O| model) = %fn”, proba);
就可以输出运用前向算法计算观察序列所得到的概率值。至此,所有的准备工作已结束,接下来,我们将进入具体的程序解读。
首先,需要定义HMM的数据结构,也就是HMM的五个基本要素,在UMDHMM 中是如下定义的(在hmm.h中):
typedef struct
{
int N; /* 隐藏状态数目;Q={1,2,…,N} */
int M; /* 观察符号数目; V={1,2,…,M}*/
double **A; /* 状态转移矩阵A[1..N][1..N]. a[i][j] 是从t时刻状态i到t+1时刻状态j的转移概率 */
double **B; /* 混淆矩阵B[1..N][1..M]. b[j][k]在状态j时观察到符合k的概率。*/
double *pi; /* 初始向量pi[1..N],pi[i] 是初始状态概率分布 */
} HMM;
前向算法程序示例如下(在forward.c中):
/*
函数参数说明:
*phmm:已知的HMM模型;T:观察符号序列长度;
*O:观察序列;**alpha:局部概率;*pprob:最终的观察概率
*/
void Forward(HMM *phmm, int T, int *O, double **alpha, double *pprob) {
int i, j; /* 状态索引 */
int t; /* 时间索引 */
double sum; /*求局部概率时的中间值 */
/* 1. 初始化:计算t=1时刻所有状态的局部概率: */
for (i = 1; i <= phmm->N; i++)
alpha[1][i] = phmm->pi[i]* phmm->B[i][O[1]];
/* 2. 归纳:递归计算每个时间点,t=2,… ,T时的局部概率 */
for (t = 1; t < T; t++)
{
for (j = 1; j <= phmm->N; j++)
{
sum = 0.0;
for (i = 1; i <= phmm->N; i++)
sum += alpha[t][i]* (phmm->A[i][j]);
alpha[t+1][j] = sum*(phmm->B[j][O[t+1]]);
}
}
/* 3. 终止:观察序列的概率等于T时刻所有局部概率之和*/
*pprob = 0.0;
for (i = 1; i <= phmm->N; i++)
*pprob += alpha[T][i];
}
下一节我将用这个程序来验证英文原文中所举前向算法演示例子的问题。
在HMM这个翻译系列的原文中,作者举了一个前向算法的交互例子,这也是这个系列中比较出彩的地方,但是,在具体运行这个例子的时候,却发现其似乎有点问题。
先说一下如何使用这个交互例子, 运行时需要浏览器支持java,我用的是firefox。首先在Set按钮前面的对话框里上观察序列,如“Dry,Damp, Soggy” 或“Dry Damp Soggy”,观察符号间用逗号或空格隔开;然后再点击Set按钮,这样就初始化了观察矩阵;如果想得到一个总的结果,即Pr(观察序列|隐马尔科夫模 型),就点旁边的Run按钮;如果想一步一步观察计算过程,即每个节点的局部概率,就单击旁边的Step按钮。
原文交互例子(即天气这个例子)中所定义的已知隐马尔科夫模型如下:
1、隐藏状态 (天气):Sunny,Cloudy,Rainy;
2、观察状态(海藻湿度):Dry,Dryish,Damp,Soggy;
3、初始状态概率: Sunny(0.63), Cloudy(0.17), Rainy(0.20);
4、状态转移矩阵:
weather today
Sunny Cloudy Rainy
weather Sunny 0.500 0.375 0.125
yesterday Cloudy 0.250 0.125 0.625
Rainy 0.250 0.375 0.375
5、混淆矩阵:
observed states
Dry Dryish Damp Soggy
Sunny 0.60 0.20 0.15 0.05
hidden Cloudy 0.25 0.25 0.25 0.25
states Rainy 0.05 0.10 0.35 0.50
为了UMDHMM也能运行这个例子,我们将上述天气例子中的隐马尔科夫模型转化为如下的UMDHMM可读的HMM文件weather.hmm: ——————————————————————–
M= 4
N= 3
A:
0.500 0.375 0.125
0.250 0.125 0.625
0.250 0.375 0.375
B:
0.60 0.20 0.15 0.05
0.25 0.25 0.25 0.25
0.05 0.10 0.35 0.50
pi:
0.63 0.17 0.20
——————————————————————–
在运行例子之前,如果读者也想观察每一步的运算结果,可以将
umdhmm-v1.02目录下forward.c中的void Forward(…)函数替换如下: ——————————————————————–
void Forward(HMM *phmm, int T, int *O, double **alpha, double *pprob) {
int i, j; /* state indices */
int t; /* time index */
double sum; /* partial sum */
/* 1. Initialization */
for (i = 1; i <= phmm->N; i++)
{
alpha[1][i] = phmm->pi[i]* phmm->B[i][O[1]];
printf( “a[1][%d] = pi[%d] * b[%d][%d] = %f * %f = %f\n”,i, i, i, O[i], phmm->pi[i], phmm->B[i][O[1]], alpha[1][i] );
}
/* 2. Induction */
for (t = 1; t < T; t++)
{
for (j = 1; j <= phmm->N; j++)
{
sum = 0.0;
for (i = 1; i <= phmm->N; i++)
{
sum += alpha[t][i]* (phmm->A[i][j]);
printf( “a[%d][%d] * A[%d][%d] = %f * %f = %f\n”, t, i, i, j, alpha[t][i], phmm->A[i][j], alpha[t][i]* (phmm->A[i][j]));
printf( “sum = %f\n”, sum );
}
alpha[t+1][j] = sum*(phmm->B[j][O[t+1]]);
printf( “a[%d][%d] = sum * b[%d][%d]] = %f * %f = %f\n”,t+1, j, j, O[t+1], sum, phmm->B[j][O[t+1]], alpha[t+1][j] );
}
}
/* 3. Termination */
*pprob = 0.0;
for (i = 1; i <= phmm->N; i++)
{
*pprob += alpha[T][i];
printf( “alpha[%d][%d] = %f\n”, T, i, alpha[T][i] );
printf( “pprob = %f\n”, *pprob );
}
}
——————————————————————–
替换完毕之后,重新“make clean”,“make all”,这样新的testfor
可执行程序就可以输出前向算法每一步的计算结果。
现在我们就用testfor来运行原文中默认给出的观察序列
“Dry,Damp,Soggy”,其所对应的UMDHMM可读的观察序列文件test1.seq: ——————————————————————–
T=3
1 3 4
——————————————————————–
好了,一切准备工作就绪,现在就输入如下命令:
testfor weather.hmm test1.seq > result1
result1就包含了所有的结果细节: ——————————————————————–
Forward without scaling
a[1][1] = pi[1] * b[1][1] = 0.630000 * 0.600000 = 0.378000
a[1][2] = pi[2] * b[2][3] = 0.170000 * 0.250000 = 0.042500
a[1][3] = pi[3] * b[3][4] = 0.200000 * 0.050000 = 0.010000
pprob = 0.026901
log prob(O| model) = -3.615577E+00
prob(O| model) = 0.026901
…
——————————————————————–
黑体部分是最终的观察序列的概率结果,即本例中的Pr(观察序列|HMM) = 0.026901。
但是,在原文中点Run按钮后,结果却是:Probability of this model = 0.027386915。
这其中的差别到底在哪里?我们来仔细观察一下中间运行过程:
在初始化亦t=1时刻的局部概率计算两个是一致的,没有问题。但是,t=2时,在隐藏状态“Sunny”的局部概率是不一致的。英文原文给出的例子的运行结果是:
Alpha = (((0.37800002*0.5) + (0.0425*0.375) + (0.010000001*0.125)) * 0.15) = 0.03092813
而UMDHMM给出的结果是: ——————————————————————–
a[1][1] * A[1][1] = 0.378000 * 0.500000 = 0.189000
sum = 0.189000
a[1][2] * A[2][1] = 0.042500 * 0.250000 = 0.010625
sum = 0.199625
a[1][3] * A[3][1] = 0.010000 * 0.250000 = 0.002500
sum = 0.202125
a[2][1] = sum * b[1][3]] = 0.202125 * 0.150000 = 0.030319 ——————————————————————–
区别就在于状态转移概率的选择上,原文选择的是状态转移矩阵中的第一行,而UMDHMM选择的则是状态转移矩阵中的第一列。如果从原文给出的状态转移 矩阵来看,第一行代表的是从前一时刻的状态“Sunny”分别到当前时刻的状态“Sunny”,“Cloudy”,“Rainy”的概率;而第一列代表的 是从前一时刻的状态“Sunny”,“Cloudy”,“Rainy”分别到当前时刻状态“Sunny”的概率。这样看来似乎原文的计算过程有误,读者不 妨多试几个例子看看,前向算法这一章就到此为止了。
六、维特比算法(Viterbi Algorithm)
寻找最可能的隐藏状态序列(Finding most probable sequence of hidden states)
对于一个特殊的隐马尔科夫模型(HMM)及一个相应的观察序列,我们常常希望能找到生成此序列最可能的隐藏状态序列。
1.穷举搜索
我们使用下面这张网格图片来形象化的说明隐藏状态和观察状态之间的关
我们可以通过列出所有可能的隐藏状态序列并且计算对于每个组合相应的观察序列的概率来找到最可能的隐藏状态序列。最可能的隐藏状态序列是使下面这个概率最大的组合:
Pr(观察序列|隐藏状态的组合)
例如,对于网格中所显示的观察序列,最可能的隐藏状态序列是下面这些概率中最大概率所对应的那个隐藏状态序列:
Pr(dry,damp,soggy | sunny,sunny,sunny), Pr(dry,damp,soggy | sunny,sunny,cloudy), Pr(dry,damp,soggy | sunny,sunny,rainy), . . . . Pr(dry,damp,soggy | rainy,rainy,rainy)
这种方法是可行的,但是通过穷举计算每一个组合的概率找到最可能的序列是极为昂贵的。与前向算法类似,我们可以利用这些概率的时间不变性来降低计算复杂度。
2.使用递归降低复杂度
给定一个观察序列和一个隐马尔科夫模型(HMM),我们将考虑递归地寻找最有可能的隐藏状态序列。我们首先定义局部概率,它是到达网格中的某个特殊的中间状态时的概率。然后,我们将介绍如何在t=1和t=n(>1)时计算这些局部概率。
这些局部概率与前向算法中所计算的局部概率是不同的,因为它们表示的是时刻t时到达某个状态最可能的路径的概率,而不是所有路径概率的总和。
2a.局部概率’s和局部最佳途径
考虑下面这个网格,它显示的是天气状态及对于观察序列干燥,湿润及湿透的一阶状态转移情况:
对于网格中的每一个中间及终止状态,都有一个到达该状态的最可能路径。举例来说,在t=3时刻的3个状态中的每一个都有一个到达此状态的最可能路径,或许是这样的:
我们称这些路径局部最佳路径(partial best paths)。其中每个局部最佳路径都有一个相关联的概率,即局部概率或。与前向算法中的局部概率不同,是到达该状态(最可能)的一条路径的概率。
因而(i,t)是t时刻到达状态i的所有序列概率中最大的概率,而局部最佳路径是得到此最大概率的隐藏状态序列。对于每一个可能的i和t值来说,这一类概率(及局部路径)均存在。
特别地,在t=T时每一个状态都有一个局部概率和一个局部最佳路径。这样我们就可以通过选择此时刻包含最大局部概率的状态及其相应的局部最佳路径来确定全局最佳路径(最佳隐藏状态序列)。
2b.计算t=1时刻的局部概率’s
我们计算的局部概率是作为最可能到达我们当前位置的路径的概率(已知的特殊知识如观察概率及前一个状态的概率)。当t=1的时候,到达某状态的最可能路径明显是不存在的;但是,我们使用t=1时的所处状态的初始概率及相应的观察状态k1的观察概率计算局部概率;即
——与前向算法类似,这个结果是通过初始概率和相应的观察概率相乘得出的。
2c.计算t>1时刻的局部概率’s
现在我们来展示如何利用t-1时刻的局部概率计算t时刻的局部概率。
考虑如下的网格:
我们考虑计算t时刻到达状态X的最可能的路径;这条到达状态X的路径将通过t-1时刻的状态A,B或C中的某一个。
因此,最可能的到达状态X的路径将是下面这些路径的某一个
(状态序列),…,A,X
(状态序列),…,B,X
或 (状态序列),…,C,X
我们想找到路径末端是AX,BX或CX并且拥有最大概率的路径。
回顾一下马尔科夫假设:给定一个状态序列,一个状态发生的概率只依赖于前n个状态。特别地,在一阶马尔可夫假设下,状态X在一个状态序列后发生的概率只取决于之前的一个状态,即
Pr (到达状态A最可能的路径) .Pr (X | A) . Pr (观察状态 | X)与此相同,路径末端是AX的最可能的路径将是到达A的最可能路径再紧跟X。相似地,这条路径的概率将是:
Pr (到达状态A最可能的路径) .Pr (X | A) . Pr (观察状态 | X)因此,到达状态X的最可能路径概率是:
其中第一项是t-1时刻的局部概率,第二项是状态转移概率以及第三项是观察概率。
泛化上述公式,就是在t时刻,观察状态是kt,到达隐藏状态i的最佳局部路径的概率是:
这里,我们假设前一个状态的知识(局部概率)是已知的,同时利用了状态转移概率和相应的观察概率之积。然后,我们就可以在其中选择最大的概率了(局部概率)。
2d.反向指针,’s
考虑下面这个网格
在每一个中间及终止状态我们都知道了局部概率,(i,t)。然而我们的目标是在给定一个观察序列的情况下寻找网格中最可能的隐藏状态序列——因此,我们需要一些方法来记住网格中的局部最佳路径。
回顾一下我们是如何计算局部概率的,计算t时刻的’s我们仅仅需要知道t-1时刻的’s。在这个局部概率计算之后,就有可能记录前一时刻哪个状态生成了(i,t)——也就是说,在t-1时刻系统必须处于某个状态,该状态导致了系
自动控制根轨迹实验报告
实验三 根轨迹分析 一、实验目的: 1.熟悉零、极点对根轨迹的影响 2.组合典型环节按照题目完成相应曲线 二、实验内容 鱼鹰型倾斜旋翼飞机V-22既是一种普通飞机,又是一种直升机。当飞机起飞和着陆时,其发动机位置可以使V-22像直升机那样垂直起降,而在起飞后,它又可以将发动机旋转90度,切换到水平位置,像普通飞机一样飞行。在直升机模式下,飞机的高度控制系统如图所示。要求: (1) 概略绘出当控制器增益K1变化时的系统根轨迹图,确定使系统稳定的K1值范围; (2) 当取K1=280时,求系统对单位阶跃输入r(t)=l(t)的实际输出h(t),并确定系统的 超调量和调节时间(Δ=2%); (3) 当K1=280,r(t)=0时,求系统对单位阶跃扰动N (s )=1/s 的输出h n (t); (4) 若在R (s )和第一个比较点之间增加一个前置滤波器 G p (s)= 5 .05.15 .02 ++s s Matlab 指令如下 fenzi=[1 1.5 0.5]; fenmu=[1 0]; G1=tf(fenzi,fenmu) fenzi=[1]; fenmu=conv(conv([20 1],[10 1]),[0.5 1]); G2=tf(fenzi,fenmu) sys1=series(G1,G2) rlocus(sys1) sys2=feedback(280*sys1,1) step(sys2) sys3=feedback(G2,280*G1) step(sys3) G3=tf([0.5],[1 1.5 0.5]) sys4=series(G3,sys2) step(sys4)
自动控制根轨迹实验(二)
2 线性系统的根轨迹研究 2.1 实验目的 (1) 考察闭环系统根轨迹的一般形成规律。 (2) 观察和理解引进零极点对闭环根轨迹的影响。 (3) 观察、理解根轨迹与系统时域响应之间的联系。 (4) 初步掌握利用产生根轨迹的基本指令和方法。 2.2 实验内容 根轨迹绘制的指令法、交互界面法;复平面极点分布和系统响应的关系。 已知单位负反馈系统的开环传递函数为2 )^54()2()(2+++=s s s K s G ,实验要求: (1) 试用MATLAB 的rlocus 指令,绘制闭环系统根轨迹。(要求写出指令,并绘出图 形。) num=[1 2] num = 1 2 >> den=[1 0 16 0 25] den = 1 0 16 0 25 >> rlocus(tf(num,den));
(2)利用MATLAB的rlocfind指令,确定根轨迹的分离点、根轨迹与虚轴的交点。(要求写出指令,并给出结果。) (3)利用MATLAB的rlocfind指令,求出系统临界稳定增益,并用指令验证系统的稳定性。 >> rlocfind(G) Select a point in the graphics window selected_point = -0.0000 + 3.6025i ans = 65.8411
>> sym G G=tf([1 2],[1 8 26 40 25]); sym p den=[1 8 26 40 25]; p=roots(den) ans = G ans = p p = -2.0000 + 1.0000i -2.0000 - 1.0000i -2.0000 + 1.0000i -2.0000 - 1.0000i (4)利用SISOTOOL交互界面,获取和记录根轨迹分离点、根轨迹与虚轴的交点处的关键参数,并与前面所得的结果进行校对验证。(要求写出记录值,并给出说明。)
学生社团章程范本
企业内部章程系列 学生社团章程范例(标准、完整、实用、可修改)
编号:FS-QG-33816学生社团章程范例 Sample student association charter 说明:为规定公司的组织和活动基本准则,并通过所有股东共同一致认可,从而提升公司的经营和管理效率,特此制定。 学生社团章程【1】 为了规范我校学生社团的管理体制,推动学生社团向规范化、多元化、可持续发展,丰富学生的第二课堂活动,明确学生社团的权利和义务,保护学生社团的合法权益,依照国家和学校的有关规定,特制定本章程。 总则 第一条学生社团宗旨:丰富学生校园业余生活,满足学生的多元文化需求,在促进学生全面发展的同时,充分挖掘学生的潜能,使学生初步形成某些特长,并不断提高学生在艺术、体育、科技等方面的修养,展示学生积极向上的精神风貌,提高学生的综合素质、全心全意为学生服务,全面规范地推动校园文化建设。 第二条学生社团必须坚持四项基本原则,遵守国家法律
和学校有关规定,贯彻国家教育方针。同时学生社团活动应遵循既要民主,又要集中;既要活跃,又要秩序的原则,保证学生社团的健康发展。 第一章社团领导组织机构 1.学校社团工作隶属于校园文化建设的一部分,由学校 学生社团管理领导小组领导,对社团全面负责,并安排工作和活动。 2.每个社团设指导教师一名,按学校确定的要求统一开展活动。 3.每个社团设一名社长,负责组织、宣传等活动。 第二章社团组建与审批、管理 1.学校成立社团筹备领导小组,有计划、有目的、有步骤地开展活动。 2.各班分发各社团简介,做好动员工作。 3.班主任做好分类报名登记。 4.调整确立开展的社团活动。 5.报学生社团管理领导小组讨论审批。 6.学生社团管理领导小组制订社团活动考核细则,进行
个人学习计划范文8篇
个人学习计划范文8篇 个人学习计划范文8篇 时间过得可真快,从来都不等人,我们的学习生活又将在忙碌中充实着,在喜悦中收获着,此时此刻我们需要开始制定一个学习计划。那么我们该怎么去写学习计划呢?以下是为大家整理的个人学习计划8篇,供大家参考借鉴,希望可以帮助到有需要的朋友。 个人学习计划篇1 一、全年各项护理工作量及工作达标情况 1、工作量:急诊人次。参加抢救人次。配合急诊手术 例。护理留观病人人次。出车车次。处理突发事件次。 2、工作达标情况:急救物品完好率达。无菌物品合格率。病历书写的合格率。护理综合满意度。护理技术操作考核合格率 二、加强护理人员服务意识,提供优质服务 1、强化服务理念 全科护士参加医院组织优质服务培训班活动,不断进行礼仪行为培训、规范常用礼貌用语及操作过程中的交流用语,并使用在实际工作中。不断就沟通技巧方面问题进行学习和讨论,培养护理人员对纠纷苗头的预见性,有效处理工作中出现的各种矛盾和分歧,共同构建护患之间互相信任感,全年实现0投诉,综合满意度达99.1%. 2、以人为本,充分满足病人的就诊需求 不断改善输液大厅的环境,安装电视等设施,提供纸巾、水杯、
无陪人患者床头一杯水等便民服务。不断优化就诊流程,及时进行分诊,对急危重患者采取使用急诊优先服务卡优先缴费取药等措施,减少候诊取药的时间。并通过环境的卫生督促、护理巡视及健康宣教等工作来提高服务质量。重视三无人员的病情处理、基础护理和三餐饮食、及时了解其情况、帮忙联系家属或救助站,今年救助此类病人达人,通过身份证联系省外家属人。此举措受到了患者家属及其他病人的赞许。对患者的意见及在工作中出现的问题进行讨论整改,不断提高服务形象 三、科学化、制度化的护理管理,重点监督制度落实情况。 1、通过分组区域管理,进行分组连续性排班,减少交接-班次数,有效利用人力资源,通过高年资护士的动态质控,减轻年轻护士的工作压力和减少护理隐患,保证各班的护理质量。 2、对质控员进行明确分工,专人负责各区域的物品、工作流程等管理,发现存在问题,及时反馈并讨论修订,保证各区域的护理质量。切实履行绩效考评制度,如实反馈人员层级能力,使护理质控落实到位。 3、通过一年时间调整,护理队伍结构趋于合理,根据急诊区域划分,基本上按个人工作能力定岗,基本实现护士层级管理,达到人员的合理分配使用。 4、畅通急诊绿色通道,提高了抢救成功率。对于各种急、危、重症病人就诊时,合理利用绿色通道措施,为抢救赢得了宝贵时间。 5、不断完善护理工作应急预案包括突发事件的应急预案。
自控实验报告实验三 线性系统的根轨迹
实验三 线性系统的根轨迹 一、实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、实验报告 1.根据内容要求,写出调试好的MATLAB 语言程序,及对应的结果。 2. 记录显示的根轨迹图形,根据实验结果分析根轨迹的绘制规则。 3. 根据实验结果分析闭环系统的性能,观察根轨迹上一些特殊点对应的K 值,确定闭环系统稳定的范围。 4.写出实验的心得与体会。 三、实验内容 请绘制下面系统的根轨迹曲线同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。 一、 ) 136)(22()(2 2 ++++=s s s s s K s G 1、程序代码: G=tf([1],[1,8,27,38,26]); rlocus (G); [k,r]=rlocfind(G) G_c=feedback(G,1); step(G_c) 2、实验结果:
-8-6 -4 -2 24 6 8 Root Locus Real Axis I m a g i n a r y A x i s selected_point = -8.8815 + 9.4658i k = 1.8560e+04 r = -10.2089 + 8.3108i -10.2089 - 8.3108i 6.2089 + 8.2888i 6.2089 - 8.2888i Time (seconds) A m p l i t u d e selected_point = -9.5640 - 7.6273i k = 1.3262e+04 r = -9.5400 + 7.6518i -9.5400 - 7.6518i 5.5400 + 7.6258i 5.5400 - 7.6258i Time (seconds) A m p l i t u d e
社团章程草案范本
社团章程草案范本 第一章总则 第一条本社团的名称全称(外语类社团注明英文名字,学生社团的名称应当符合法律、法规的规定、不得违背校园文明风尚)、简称。 第二条本社团的性质(其中必须注明:社团登记类别;自愿结成:非营利性社会组织;社团共分为:学术类(专业类)、实践类、文艺类、思想类、体育类。) 第三条本社团的宗旨(其中必须注明:遵守宪法、法律、法规和学校的规定) 第四条本社团接受山东中医药大学学生社团管理中心的监督管理,接受指导单位的指导(必须注明具体的指导单位)第二章活动范围 第五条本社团的活动范围(必须具体、明确) (一)组织本社团会员在学校开展培训、交流、讲座的活动;(二)…… (三)…… 第三章会员 第六条申请加入本社团的会员,必须具备下列条件:(一)具有山东中医药大学正式学籍的本科生、专科生及研究生; (二)承认本社团章程;
(三)自愿加入。 第七条会员入会的程序是: (一)提出入会申请; (二)进行审核登记并交纳会员费 (三)由本社团发给会员证。 第八条会员享有以下权利: (一)本社团的选举权、被选举权和表决权; (二)参加本社团活动的权利; (三)获得本社团服务的优先权; (四)对本社团工作的批评建议权和监督权; (五)入会自愿、退会自由; 第九条会员履行下列义务: (一)执行本社团的决议; (二)维护本社团的合法权益; (三)参与本社团相关活动; (四)按规定交纳会费; 第十条会员退会应书面通知本社团,并交回会员证,社团不退返剩余会员费。 第十一条会员如有严重违反本章程的行为,经社团执行机构会议表决通过,予以除名。 第四章组织机构和负责人产生、罢免 第十二条本社团的最高权力机构是会员大会,会员大会
【精选】个人学习计划范文6篇
【精选】个人学习计划范文6篇 个人学习计划范文6篇 人生天地之间,若白驹过隙,忽然而已,我们的学习目标和学习任务同时也不断变化,此时此刻我们需要开始制定一个学习计划。估计许多人是想得很多,但不会写,下面是帮大家整理的个人学习计划6篇,仅供参考,大家一起来看看吧。 个人学习计划篇1一、指导思想 读书,能够改变教师的人生,而且能促使教师去不断地思考教学工作、生活、生命,从而实现自我人生层次的提升和生命的升华。伴着我校“构建书香校园,打造学习型校园”的步伐,积极参与学校的读书活动,认真学习贯彻学校提出的教师读书计划,把读书活动融入到自己的教育教学工作当中,促进教学实践与理论的结合与反思,提高师德素质和自身修养,满足学校建设学习型组织的需要。 二、个人学习目标 1、利用三年时间提高自身的理论水平、科研能力和反思能力,指导教育教学工作,提高教育实践能力,以更加适应教育发展的需要。 2、通过读书活动不断提升自己的文化内涵和修养,提高自己运用科学观点看待问题的能力。 3、提高自身学习的兴趣使自己融到我校学习型、研究型组织的建设之中。 三、实施策略
1、根据学校制定的读书活动规划,从读书的内容到读书的要求进行切实可行的规划。 2、按照学校提出的读书指导意见,认真学习名人传记教育家的书、专业书、现代科技书、学习方法书等书籍。以专业书籍为主要内容,每学期重点读一本指定读物,并完成1万字左右的摘抄,每学期至少读2本自备读物,做到边读书,边反思。 3、读书指导教育教学实践工作,实践与所学相互印证,形成自己的成果。 4、积极和校内教师相互交流,相互启发,共同发展。 5、期末认真撰写读书心得体会,写出自己的认识和理解。 四、读书选择及活动的范围 指定书目: ⑴《教育新理念》 ⑵《给教师的一百条新建议》 ⑶《教师专业化的理论与实践》 ⑷《新课程中教师行为的变化》 ⑸《细说汉字》 ⑹《多元智能》 另根据所教学科选择适合自己教学的书来读,在校内展开读书活动。 五、读书活动具体安排 1、充分发挥教师自身的资源优势,实现资源共享。
大学校园书法协会社团章程手册制度
XX协会、社团章程(草案) 第一章总则 第一条社团名称:XX。 第二条本会的性质宗旨:XX是由XX的社会团体,旨在为书法爱好者提供更好的学习、交流机会和平台,进一步提高书法水平,丰富业余文化生活,为弘扬中国传统文化艺术、促进XX文化建设做出贡献。 第三条本会的任务: (一)开展书法艺术教育和书法人才的培养; (二)组织开展书法艺术作品创作、评选、展览、讲座和笔会等交流学习活动; (三)管理和发展会员队伍; (四)为会员提供练习、创作环境场所并组织开展书法创作等实践活动; (五)组织开展与书法艺术有关的联谊与合作活动。 第二章会员 第四条承认本章程并符合下列条件者,可申请加入本联谊会: (一)XXX员工以及历届学员(XX书法班会员优先); (二)有志从事书法学习、创作活动并能坚持参加联谊会活动的书法爱好者。
第五条申请加入本联谊会须填写《入会申请表》,经联谊会理事会审查合格,即可吸收为会员,并由联谊会颁发会员证。 第六条本会会员享有以下权利: (一)本会的选举权、被选举权和表决权; (二)有权参加本会的活动; (三)对本会理事会工作的批评建议和监督权; (四)有退会的自由。 第七条本会会员须履行以下义务: (一)执行本会的决议、决定和各项规章制度; (二)维护本会的形象和本会合法权益; (三)完成本会安排的工作任务; (四)按规定交纳会费; (五)积极参加本会举办的各种艺术活动; (六)不得以本会名义搞个人行为。 第八条会员退会应书面通知本会。无故连续三次不参加本会活动、或连续半年不缴纳会费的,视为自动退会。 第九条会员如有违法或严重违反本章程的行为,经理事会研究通过,可以予以除名。 第三章组织机构 第十条本会的最高权力机构是会员大会。会员大会的职权:
2020干部个人学习计划范文3篇
计划工作是全部管理职能中最基本的一个职能,如何制定20xx干部个人学习计划?。20xx 干部个人学习计划怎么写?下面是我为您准备的干部个人学习计划,欢迎参考,希望能对您有所帮助。 根据本校“xx”领导干部学习规划的要求,为了更好的做好自己的本职工作,不断提升自己的整体素质,促进自身素养和业务发展水平的提高。特制定本年度个人学习计划: 一、指导思想以科学发展观为指导,深入贯彻落实科学发展观,全面贯彻全国教育工作会议精神和《国家中长期教育改革和发展规划纲要》,坚持教育优先发展和科学发展,努力使自己通过学习适应时代发展的要求,无愧于人民教师的称号。 二、学习目标通过学习,不断丰富自己的教育教学理论同广大教师开展幼教活动。推进教育均衡化发展,科学规划,和谐发展。同广大教师实施素质教育,提高本园的教育教学效果,提升学校管理水平。让幼儿乐学,教师乐教,家长满意,社会认可。 三、学习内容 1、《国家中长期教育改革和发展规划纲要》; 2、幼儿园、班制度。 3、各种教育刊物; 4、上级规定学习内容; 四、学习形式 1、积极参加干训部组织的各种学习活动,保证按时完成上级规定本年度的学习任务; 2、除了积极参加集体学习外,自己利用业余时间自学幼教理论 3、观看视频学习、上学习; 五、学习效果 1、保质保量完成上级布置的学习作业并及时上交 2、平时做好学习笔记、每个月写一篇工作反思或心得、每学期一个学校管理案例、一个年度一个个人学习计划,一个年度结合本岗位工作写一篇论文,一篇总结。 本年度随着工作岗位的变化,越来越觉得自己的知识水平,管理意识,行事能力亟待提高,结合单位的“xx期间领导干部学习提高规划”,特制定20XX年度个人学习提高计划如下: 一、全力确保本职工作的全部、及时、高效完成向前任、同事、工作上相关领导请教、
00实验三 基于MATLAB的根轨迹绘制与性能分析
实验四基于MATLAB的根轨迹绘制与性能分析 [实验目的] 1.掌握MATLAB下的根轨迹绘制方法; 2.学会利用根轨迹进行系统分析。 [实验指导] 1.根轨迹作图函数(命令):rlocus( ) 调用格式: ①rlocus(sys) 或rlocus(num,den) ②rlocus(sys,k) ①②画根轨迹图,①变化参量(一般是根轨迹增益)范围系统自动给出; ②变化参量(一般是根轨迹增益)范围在程序中给出; ③r=rlocus(sys) ④ [r,k]=rlocus(sys) ③④不画根轨迹图,③返回闭环根向量;④返回闭环根向量(r)和变化参量(k)。 2.根与根轨迹增益的求取 ⑴在根轨迹上点击,可得到该点的根值和对应的根轨迹增益值。 ⑵使用计算给定根的根轨迹增益的函数(命令):rlocfind( ) 调用格式: ①[k,poles]=rlocfind(sys) ②[k,poles]= rlocfind(sys,p) 使用方法:
①首先,当前根轨迹已绘出。运行该命令时,在根轨迹图中显示出十字光标,当用户选择其中一点时,其相应的增益由k 记录,与增益相关的所有极点记录poles 中;同时,在命令行窗口显示出来。 ②事先事先给出极点p ,运行该命令时,除了显示出该根对应的增益以外,还显示出该增益对应的其它根。 3.开环零点极点位置绘图函数(命令): pzmap( ) 调用格式: ① pzmap(sys) ② [p,z]=pzmap(sys) 函数功能: 给定系统数学模型,作出开环零点极点位置图。 ① 零点极点绘图命令。零点标记为“+”,极点标记为“o”。 ② 返回零点极点值,不作图。 4.根轨迹渐进线的绘制 当根轨迹渐进线与实轴的交点σa 已求出后,可得到方程11()n m a K s σ-=--, 这是根轨迹渐进线的轨迹方程。 将1()() n m a K G s s σ-= -作为一个开环传递函数,录入到MATLAB 中,再使用根 轨迹作图函数(命令)rlocus( ),生成的轨迹就是原根轨迹的渐进线。 5.举例 例1:开环传递函数1 ()(1)(2) K G s s s s =++绘制其闭环根轨迹。 程序: >> z=[];p=[0,-1,-2];k=1;sys=zpk(z,p,k);rlocus(sys) 运行结果:
根轨迹分析实验报告
. 课程名称:控制理论乙指导老师:成绩: 实验名称:控制系统的根轨迹分析实验类型:同组学生姓名: 一、实验目的和要求(必填)二、实验内容和原理(必填) 三、主要仪器设备(必填)四、操作方法和实验步骤 五、实验数据记录和处理六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1.掌握用计算机辅助分析法分析控制系统的根轨迹 2.熟练掌握Simulink仿真环境 二、实验内容和原理 1.实验内容 一开环系统传递函数为 k(s?2)?s)G(22(s?4s?3)绘制出此闭环系统的根轨迹,并分析系统的稳定性。 2.实验原理 根轨迹是指,当开环系统某一参数(一般来说,这一参数选作开环系统的增益k)从零变到无穷大时,死循环系统特征方程的根在s平面上的轨迹。因此,从根轨迹,可分析系统的稳定性、稳态性能、动态性能。同时,对于设计系统可通过修改设计参数,使闭环系统具有期望的零极点分布,因此根轨迹对系统设等。pzmap,rlocus,rlocfind计也具有指导意义。在MATLAB中,绘制根轨迹有关的函数有:3.实验要求 (1)编制MATLAB程序,画出实验所要求根轨迹, 求出系统的临界开环增益,并用闭环系统的冲击响应证明之。 (2)在Simulink仿真环境中,组成系统的仿真框图,观察临界开环增益时系统单位阶跃响应曲线并记录之。三、主要仪器设备 仿真环境simulink计算机一台以及matlab软件,四、实验源代码 >> A=[1 2]; >> B=conv([1 4 3],[1 4 3]); >> G=tf(A,B) G = s + 2 ------------------------------- s^4 + 8 s^3 + 22 s^2 + 24 s + 9 Continuous-time transfer function. >> figure
学生社团章程范本
学生社团章程范本 第一章总则 第一条山西金融职业学院散打社。 第二条本组织是以学院全体散打爱好者为基地创建的社团组织,接受学院团委直接领导和统一管理,本着自愿的原则,为非营利性社会组织。 第三条遵守宪法、法律、法规和国家政策,遵守社会道德风尚,丰富校园文娱活动,提升本校素质教育层次,丰富校园文娱活动形式,给散打的同学提供交流平台。 第四条本社团是山西金融职业学院社团学生的成员,在山西金融职业学院院领导的领导下,由山西金融职业学院社团部进行管理。 第二章业务范围 第五条本团体的活动范围。 社团按照章程在团委的领导下,开办散打的培训班;社团要树立独特的创新意识,以原创为精神参加学院的社团评级活动,力创优秀社团。 第三章会员 第六条申请加入本团体的会员,必须具备下列条件: (一)具有山西金融职业学院正式学籍;
(二)承认本团体的章程; (三)有加入本团体的意愿; (四) 对散打与浓厚的兴趣; (五) 遵守山西金融职业学院学生守则; 第七条会员入会的程序是: (一)提交入会申请书; (二)由理事会或理事会授权的机构发给会员证。 第八条会员享有下列权利: (一)本团体的选举权、被选举权和表决权; (二)获取参加本社团的培训班和举办的活动资格。; (三)获得本团体服务的优先权; (四)对本团体工作的批评建议权和监督权; (五)入会自愿,退会自由; 第九条会员履行下列义务: (一) 遵守本社团章程,接受本社团领导。; (二) 积极参加本社团的活动,听从社团安排。 (三) 积极对外宣传社团的原创精神,为社团提供可行的策略谋求远的发展; (四)按规定交纳会费; (五)向本团体反映情况,提供有关资料; 第十条会员退会应书面通知本团体,并交回会员证。会员如果一年不交纳会费或不参加本团体活动的,视为自动退会。
个人学习计划范文
个人学习计划范文 个人学习计划范文篇一在短短的时间里一个学期很快就过去了,大学生活改变了我很多东西,包括我的生活方式和学习方式,当然相比以前是进步了很多。当然,作为新世纪大学生也已经根深在自己的脑子里。对于过去的一个学期里,自己总的表现还算不错,下面就是本人的学习总结:一个学期的学习,我发现大学的学习方式与高中时有相当大的差异,在高中时,每天基本上是离不开记词背诵,还有繁多的作业。而在大学,有很多东西就不再像高中时那般强迫式的完成。大学的学习要靠的是自觉和方法,以前那种跟着老师走的套路早不管用了,所以学习上就更充满挑战性了。上个学期在学习上虽然并不是很乐观,但在其它方面的知识,我到学了不少,比如,计算机方面的c++语言,网页制作,fireworks与photoshop的图片处理,还有一些关于电脑方法的常识,我觉得,学习太过于局限于大学课本,那么大学就不再是真正意义上的大学了,并且学校的图书馆也就失去意义。所以,对于上个学期总的学习情况我还是比较满意的,但这并不是最终的满意。 在大学,除了学习,还有一样非常重要的就是生活,从
小学到高中,我与同学的交流基本都很少,可能是性格的原故吧!我这人不爱主动与别人交流,更不喜欢聊一些无关痛痒的东西。因为我觉得那很没意义,所以,能与我谈得来的同学一般与我相处都非常好。不过到了大学,一切也就不一样了,你要是离来了群体也就等于鱼儿离开了水。所以我愿意平常在做一些事的时候总缺一点自信和勇气,可能与小时候的经历有关。因此在许多方面我可以比别人做的更好的,但就因为自己缺少自信和勇气,所以自己错过了很多美好的东西,这使我感到做人很失败,明明有些东西属于自己的,可是就因为勇气而最终只能把后悔留给自己。这令我很不干愿。 在大学,第一次选临时班委时就是缺少信心和勇气,所于错过了一次让大家深刻认识我的机会。过后我有些失望,更多的是后悔。不过一个月后,我终于鼓起了勇气,虽然最终并我没有当上班委,不过,我并没有把后悔留给自己,相反的,在这件事上,我明白了在大学的第一个月里我并没有与同学好好的勾通,所以,最终我以少有的票数落选了。 在过后的日子里,我尽量主动与周边的同学进行交流,虽然主动并不是我的天性,不过,我还是迈出了第一步。而今的我今非昔比了。不过,唯一欠佳的是,还没有主动与女生交流。这可能更取决我的性格,我想这个会是我接下来的一个挑战。
自动控制原理-线性系统的根轨迹实验报告
线性系统的根轨迹 一、 实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、 实验容 1. 请绘制下面系统的根轨迹曲线。 ) 136)(22()(22++++=s s s s s K s G ) 10)(10012)(1()12()(2+++++=s s s s s K s G )11.0012.0)(10714.0()105.0()(2++++= s s s s K s G 同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的围。 2. 在系统设计工具rltool 界面中,通过添加零点和极点方法,试凑出上述系统,并 观察增加极、零点对系统的影响。 三、 实验结果及分析 1.(1) ) 136)(22()(22++++=s s s s s K s G 的根轨迹的绘制: MATLAB 语言程序: num=[1];
den=[1 8 27 38 26 0]; rlocus(num,den) [r,k]=rlocfind(num,den) grid xlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus') 运行结果: 选定图中根轨迹与虚轴的交点,单击鼠标左键得: selected_point = 0.0021 + 0.9627i k = 28.7425 r = -2.8199 + 2.1667i -2.8199 - 2.1667i -2.3313 -0.0145 + 0.9873i
学校社团章程范例
学校社团章程范例
时光漫影动漫社社团章程 总则 第一条本社团的名称为: 时光漫影动漫社(又缩写为“时光社”)。 第二条本社团的性质为: 由学生组织管理、老师指导的非盈利性文学艺术类社团,由个项目学生负责人及指导老师在学校、法律规定内进行社团活动的自愿组成的学生社团。 第三条本社团的目标为 “让每一段记录时光的思维都成为我们画板上最美的景色”。第四条本社团的宗指为 在一切场合遵守宪法、法律、法规和社会道德风尚,遵守校团委、社团联盟的规定,并尽可能在其范围内提高社员的能力及各方面的艺术修养,以达到社团的目标。 第五条本社团是在学校的领导监管下,受各指导老师及各负责老师的指导,由社团联盟及学生会监督管理。 第一章会员 第六条入会条件 凡能遵守国家宪法及法律法规,遵守校学生会、校社团联盟规定,承认本协会章程及管理协议,自愿履行社团义务的当前在校学生均可申请进入。
第七条会员入会的程序 1.填写入会申请表,及个人信息简介。 2.经社团管理负责人商讨经过。 3.报社团内部统计备案。 4.由社团统一发给会员证号(有关详见注释)。 第八条会员享有的权利 1.拥有社团内部的发言权、选举权、被选举权和表决权。 2.能够本社团所举办的活动的参与权。 3.能够获得社团发放定时的各项福利。 4.拥有对本社团工作的批评建议权和监督的权利。 5.获得接受社团辅导、拓展的权利。 第九条会员履行下列义务 1.遵守学校、社团联盟、社团内部各项制度及本社团章程。 2.执行本社团的各项决议。 3.维护社团联及本社团的合法权益。 4.完成本社团布置的任务。 5.积极参与社团每项活动。 6.向本社团反映情况,提供有关资料。 7.社团辅导、举行会议时不无故不到、早退,有事应请假或托同学来通知。 第十条退会
个人学习计划范本安排(完整版)
计划编号:YT-FS-8594-86 个人学习计划范本安排 (完整版) According To The Actual Situation, Through Scientific Prediction, Weighing The Objective Needs And Subjective Possibilities, The Goal To Be Achieved In A Certain Period In The Future Is Put Forward 深思远虑目营心匠 Think Far And See, Work Hard At Heart
个人学习计划范本安排(完整版) 备注:该计划书文本主要根据实际情况,通过科学地预测,权衡客观的需要和主观的可能,提出 在未来一定时期内所达到的目标以及实现目标的必要途径。文档可根据实际情况进行修改和使用。 大学四年中,大二无疑是最关键的一年。从这一年开始,大多数同学都有了比较清晰的学习进程和相对稳定的学习、生活态度。然而,除此之外,我们还应将各部分做得更合理、完善;这样才能顺利地走下去。 对于学习,当务之急就是为英语A级做好十分的准备,若对自己要求更高,计划就得更为精细、严密、合理。 主要内容是:一,结合自身和客观情况对所需的准备量有大致的把握; 二,充分利用时间、认真执行学习计划。 值得注意的是:由于刚接触不久,我们对自己的专业课程还不是特别清楚,有的还产生了些许畏惧和慌忙感。因而,在心情相对平稳的大二,着力培养对
专业课程的兴趣、,是很相宜的。我们还应明白,无论什么事一上手时,总是有点陌生的、不安心的,后来慢慢熟悉了,很多道理也就在点点滴滴的领悟中明晰了。尽量克制、避免急噪、恐惧等不良情绪。 态度决定命运,环境影响人生,这我们都听腻了,但没几个正确地看待它。 即将走出“象牙塔”的我们,身肩来自各个方面的责任。因而,在着、这特殊而宝贵的一年里,我们不能再像一个无知而任性的顽孩子,而应该像许多成功的伟人年轻时候那样,树立宏大的奋斗目标,踏踏实实地过好每一分钟。不要以为这一分钟很不好过,要知道;如果现在放纵自己懒散的习性,以后残酷的现实会让你更难过。再说了,只要你现在花个一小时----哪怕10分钟,真正去体味思考着的乐趣,相信你不久就会再次怀念那美妙的、无与伦比的愉悦。 思考就是生命,就是生活。 主观、客观因素往往制约着一个人的成功。所以,我们不可不谈环境与自己的关系。对与我们来说,与
根轨迹分析实验报告
课程名称: 控制理论乙 指导老师: 成绩: 实验名称: 控制系统的根轨迹分析 实验类型: 同组学生姓名: 一、实验目的和要求(必填) 二、实验容和原理(必填) 三、主要仪器设备(必填) 四、操作法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1. 掌握用计算机辅助分析法分析控制系统的根轨迹 2. 熟练掌握Simulink 仿真环境 二、实验容和原理 1. 实验容 一开环系统传递函数为 22) 34()2()(+++=s s s k s G 绘制出此闭环系统的根轨迹,并分析系统的稳定性。 2. 实验原理 根轨迹是指,当开环系统某一参数(一般来说,这一参数选作开环系统的增益k )从零变到无穷大时,死循环系统特征程的根在s 平面上的轨迹。因此,从根轨迹,可分析系统的稳定性、稳态性能、动态性能。同时,对于设计系统可通过修改设计参数,使闭环系统具有期望的零极点分布,因此根轨迹对系统设计也具有指导意义。在MATLAB 中,绘制根轨迹有关的函数有:rlocus ,rlocfind ,pzmap 等。 3. 实验要求 (1)编制MATLAB 程序,画出实验所要求根轨迹, 求出系统的临界开环增益,并用闭环系统的冲击响应证明之。 (2)在Simulink 仿真环境中,组成系统的仿真框图,观察临界开环增益时系统单位阶跃响应曲线并记录之。 三、主要仪器设备 计算机一台以及matlab 软件,simulink 仿真环境 四、实验源代码 >> A=[1 2]; >> B=conv([1 4 3],[1 4 3]); >> G=tf(A,B) G = s + 2 ------------------------------- s^4 + 8 s^3 + 22 s^2 + 24 s + 9 Continuous-time transfer function. >> figure >> pzmap(G)
社团章程
****学院***街舞社团章程 第一章:总则 第一条:社团名称为DCT街舞社团。“DCT”的全称为dream come ture.意寓为梦想即将来临。第二条:社团宗旨:丰富生活、以舞会友、跳出梦想、跳出自我。 第三条:本社团接受校团委领导,遵守《***学院学生社团管理条例》。 第二章:社团成员资格及其权利和义务 第一条:社团成员应具有正式学籍的在校学生。 第二条:凡我校学生自愿申请并愿意遵守本章程,社团批准后,均可自由加入社团,社团内部成员在享有权利和履行义务方面一律平等。 第三条:社团成员有权了解章程、组织机构和财务制度,对社团的管理和开展的活动提出建议和质询。 第四条:社团成员应当接受定期注册和积极参加社团活动。 第五条:负责人违反《***院学生社团管理条例》的有关规定或校纪校规,损害成员的利益,成员有权向校团委反映。 第六条:社团成员具有选举权和被选举权,有按照章程承担社团职务的权利和相应义务。第七条:社团成员有权对街舞社团的发展提出建议,也有权对社团在发展过程中所出现的问题提出批评。 第八条:社团成员必须严格遵守社团的章程与成员大会上所做出的决议。 第九条:团成员不得做出对街舞社有害的事,并且有义务保护社团的一切财务和良好的声誉 第十条:社团成员未经社团管理组织允许,不得以任何理由以DCT街舞社团名义参加各类活动。
第三章:组织管理制度、执行机构的产生程序及权限 第一条:本社团组织管理制度由社团内部人员提出草案,并由成员大会表决通过。 第二条:成员大会是由全体成员组成的,它是社团的最高的权力机构。 第三条:成员大会行使下列职权: 1、选举和更换社团负责人; 2、听取并审议负责人的工作报告; 3、讨论决定社团重大活动事项; 4、修改社团章程; 5、审议社团财务状况。 第四条:执行机构由社团的负责人组成,包括正、副社长以及社团总监。 第五条:执行机构的任期为一年,新的执行机构由社员大会产生。 第六条:成员大会做出决议,必须经出席会议的成员半数以上通过;对社团变更、注销和修改章程做出决议,必须经出席会议的成员三分之二以上通过。有效的成员大会出席 人数必须占全体成员数的三分之二以上。 第四章:经费来源及财务管理的原则 第一条:本社团开展活动所需的经费来自社团成员每学期所缴纳的社费15元/人,除此之外,不得再以其他名义收取会费,如有特殊情况(参加比赛、额外开销)则向校团委申请经费支持或者由社团外联部联系其他赞助。 第二条:团经费必须用于章程规定的活动,任何人不得侵占、私分或挪用社团财产,亦不得在社团成员中分配。 第三条:财务管理的原则: 1、有固定的财务管理人员(负责人除外); 2、使用经费时,要有使用人、负责人以及财务管理人共同的签字,方可支出; 3、财务管理人要做收支记录,账目必须清楚,并要保留原始凭证,以备校团委检查 及在社员大会上向全体社员汇报。
个人学习计划范文
个人学习计划范文 个人自主学习计划 殷树萍 为了提高本人的政治业务素质和教育教学能力,根据学校安排,特拟定个人学习计划: 一、培训内容:以《新时期师德教育》和“八荣八耻”为主的“师德教育”培训;以《新课程推进中的问题及反思》为主的“新理念”培训;以《校本研修面对面》和《新课程理念下的创新教学设计》为主的“新课程”培训;以《教育技术培训教程》为主的“新技术”培训以及骨干教师培训。 二、学习、培训活动安排 1、集中学习培训 按照学校《培训计划》,准时参加学校组织的集中学习培训,认真做好学习笔记;虚心接受授课教师的辅导;认真完成授课教师布置的作业。
2、自主学习 利用空闲时间自学,认真做好笔录,运用现代教育技术进行课堂教学的课件。 三、达到的目标 1、努力完成学习任务,按时参加省统一考试,力争取得好成绩。 2、通过集中培训、自主学习、专项活动、专题讨论、师德论坛、案例分析、自我反省,对照检查、撰写心得体会等形式,树立正确的社会主义荣辱观,从而更加爱岗敬业、乐于奉献、关爱学生,使自己具备良好的思想政治素质和职业素养。 教师个人学习计划 杨富明 随着课程改革的深入,素质教育的全面推进,以我现有的文化知识、教育思想和教育理念、现代教育技术的运用等方面,已跟不上高质量的推进素质教育的需要。要立足岗位,必须以集体备课、业务学习和课堂教学研究为业务学习载体,脚踏实地的抓好自己业务学习,
通过自主学习来满足现代教育的需要,全面提高自身素质。为此特制订个人学习计划。 一、学习目标: 为了进一步丰富自己的专业知识、提高素质修养,适应教育改革发展和全面推进素质教育的需要,现结合自身实际情况,我对自己工作、学习制订以下规划: 1、加强学习,掌握正确的教育观点。了解教育工作的基本规律和基本方法,进行教育实践。了解学科的发展动向和最新的研究成果。所掌握的教育理论转变成教育教学的实际能力。 2、认真学习领会新课标,掌握自己所教学科的学科特点,教的最优化要落实到学的最优化,形成自己的教学风格。 3、继续探索生活化、情境化的创设方法,掌握生活化、情境化的课堂风格。加强自身素质的提高,读教育理论书籍、写读书笔记、完成自己应该写的教育教学论文。 4、加强学习,掌握正确的教育观点。提高自身的政治、业务理论水平,提高教育实践能力,以适应形势的发展。树立良好的敬业精神,
学校田径社团章程
学校田径社团章程 学校田径社团章程范文一: 第一章总则 一、xx中学“田径”社团的性质:在学校统一管理下,在有田径特长的教师指导与带领下,由一批共同的志趣、爱好和田径特长的学生组织并自愿参加的群众性团体。 二、田径社团的宗旨:丰富学生校园文化生活,满足学生的多元文化需求,在促进学生全面发展的同时,充分挖掘学生的潜能,通过开展丰富多彩的活动成为学生的第二课堂,推动xx中学的校园文化建设。 三、社团的任务:积极组织和开展各项活动,引导社员积极参与学校及各级各类组织的比赛;加强与社会上的团队联系,增进友谊、扩大影响。 第二章分则 一、艺术社团的名称:田径社团; 社团负责人:由本社团成员选举产生,每两年选举一次; 社团成员:凡我校正式注册的学生均可申请加入本社团。 活动时间:每周四:15:50——17:00 活动地点:校操场。 二、社团成员的权利: 1、社团成员有接受社团培训,参加社团活动的权利; 2、社团成员有对本社工作提出意见或建议的权利; 3、社团成员有退社的权利;(注:凡退出本团的,需经个人申请由社团
指导教师批准后,方可退团。) 4、社团成员有权参加各类比赛和每学期优秀学员的评选。 三、社团成员的义务: 1、社团成员必须按时参加社团的培训和活动。如有特殊情况,须提前请假; 2、社团成员必须认真及时地完成社团交给的任务,积极参加本团的各项活动; 3、社团成员必须自觉遵守本团各项规章制度,自觉维护社团形象,有团体凝聚力。 4、社团成员必须维护学校的形象,弘扬xx中学的校园文化。 四、奖惩制度: 1、对于社团积极分子,在期末考核评优时,要给予适当奖励; 2、对于在各级各类比赛中取得成绩的社团成员,按获奖级别发放奖励; 3、凡没完成社团布置任务的成员,不得参与期末考核评议; 4、凡是社团的活动,无特别情况而不到者,超过三次作自动退团处理,并在其文明班级评选中适当扣分。 第三章附则 一、本章程的修改权、解释权归xx中学“田径”社团。 二、本章程自拟定之日起,正式施行。 学校田径社团章程范文二: 第一章总则
个人学习计划范文2020
个人学习计划范文2020 【篇一】 要想制订好学习计划,一般要考虑以下几方面: 一、计划要尽量全面学习计划是指学习的具体安排。 要想真正完成好学习计划,在考虑计划的时候,一定要对自己的学习生活做出全面的安排。应包括社会工作时间、为集体服务时间、锻炼时间、睡眠时间及娱乐活动时间等。这样,在学习时间内才可能精力充沛地学习。 二、安排好常规学习时间和自由学习时间。 学习时间可以分为两部分: 一是常规学习时间,主要用来完成当天老师布置的学习任务,消化当天所学的知识。 二是自由学习时间,是指完成了老师布置的学习任务后所剩下的时间。这部分时间一般可以用来补课或提高深造。学习较差的同学,随着学习水平的提高,应经历常规学习时间逐渐减少,自由时间逐渐增加的过程。凡是体会到因为抓住了自由学习时间而给学习的全局带来好处的同学,就会努力去提高常规学习时间内的学习效率,以便增加自由学习时间,使学习的主动权越来越大。 三、长计划和短安排长计划和短安排是指在一个比较长的时间内,应有个大致计划。 由于实际的学习生活往往无法预测,所以,长计划不可能太具体,不可能把每天干什么都列出来。但是,在学习上计划要解决哪些问题,心中应当有数。应把一个在短期内无法完成的学习任务分到每周、每天去。这样,在每天学习时,就会明白今天的学习在学习全局中的地位。有了具体的短安排计划,长计划中的任务可以逐步得到实现;有了长计划,就可以在完成具体学习任务时具有明确的学习目的。 四、从实际出发来制订计划在订计划的时候,不要脱离了学习的实际情况。 主要指以下几方面: 1.自己知识和能力
2.每个阶段的学习时间 3.学习上的缺欠和漏洞 4.老师教学的实际进度从实际出发还要注意的一点是不要平均使用力量,要抓住重点。 五、计划要留有余地计划终归不是现实,而只是一种可能性。 要想把计划完成现实,还要经过一段很长的努力过程,在这个过程中自己的思想会发生变化,学习的各种条件也会发生变化,计划订得再实际,也不免出现估计不到的情况。所以,为了保证计划的实现,订计划时就不要太满、太死、太紧,要留出机动时间。 【篇二】 在这学期里,要加强自己不擅长的科目,在语文上,除了把课文中的内容、知识掌握好以外,还应多读一些课外书,如名人名著等。还要再想些办法提高自己的阅读、写作能力,不能只想课内不观课外了。数学,不能只明白课本上的习题应怎么做就够了,如果要学好它,就必须在课外再花一些时间来钻研和多做一些试题等。 上课仔细听讲,弄懂每一个问题,作业即使完成,追求质量和速度,回家做好预、复习工作。在空余期间多看一本好书,适当做些娱乐。做到“少在电脑前一会儿,多看一两本好书”,扩展知识面,提高阅读以及协作能力。早晚多听读外语,多积累一些单词,提高英语各方面的水平。从良好的基础上向着更高的目标出发。 “好记性不如烂笔头。”记好每一次的笔记,认真对待每一次的口头作业,只有基础扎实了,才可以累计更多。 最后,也是最关键的一点,就是要科学安排时间,没有合理的安排,再好的计划也会付之东流。所以,在新学期里,最要学会的就是要合理安排学习、娱乐、休息的时间,要把每一点一滴宝贵的时间都抓紧。 新学期,新打算,也为新的目标努力。 【篇三】 快乐的暑假转眼间过去了,我升入了五年级,我们要用什么来迎接这充满希望,充满理想的新的一学期呢?理所当然是一个好的学习态度和令人满意的学习成绩。良