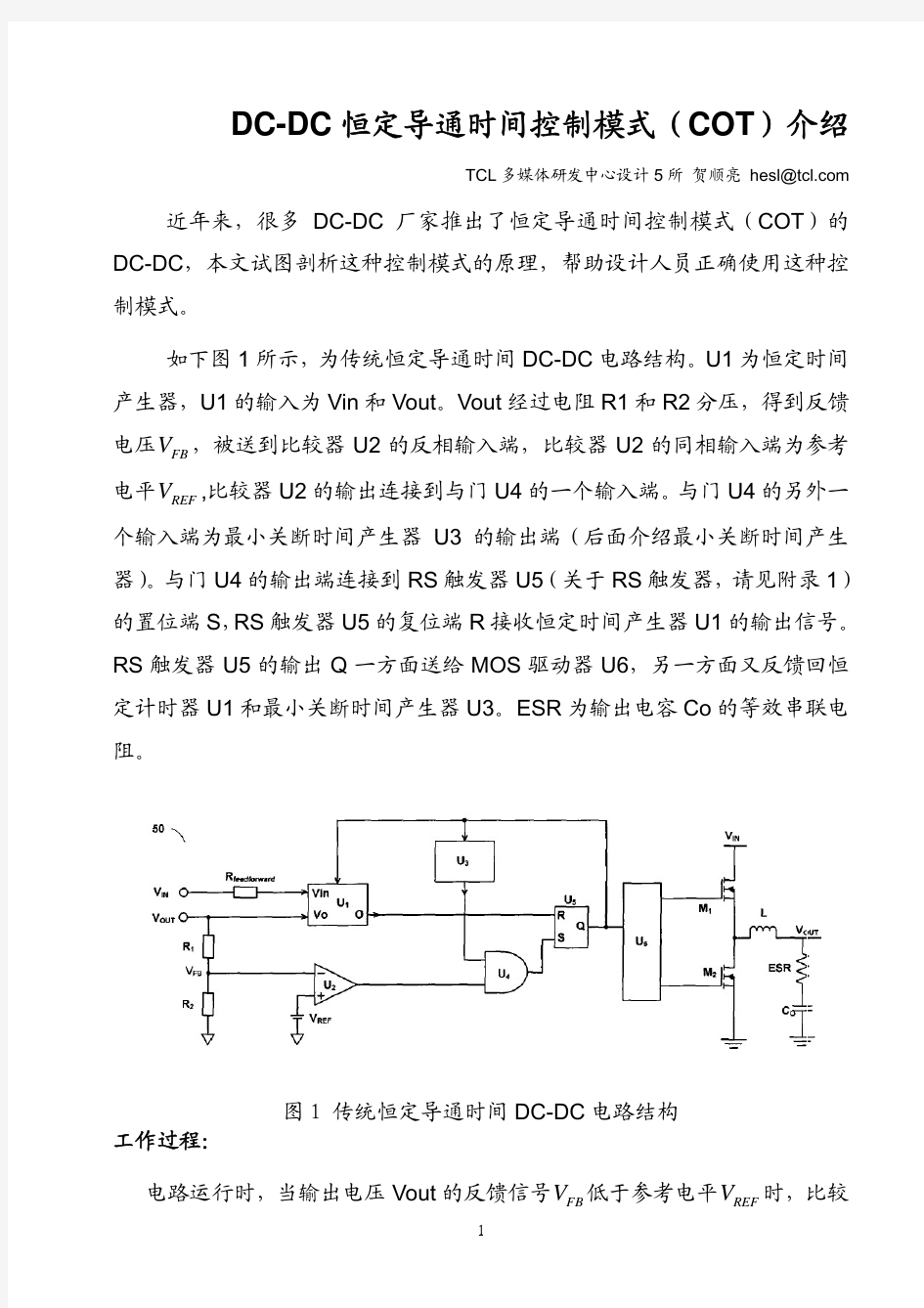
DC-DC中恒定导通时间控制模式(COT)介绍
PLC时间控制
揭阳职业技术学院 毕业论文(设计) 题目:基于PLC的学校作息时间控制系统学生姓名王东指导教师廖兴展 系(部)机电工程系专业电气自动化 班级 091学号 09454114 提交日期201 年月日答辩日期 201 年月日 201 年月日
基于PLC的学校作息时间控制系统 摘要 本文介绍一种用三菱PLC控制学校的作息时间控制系统,详细地阐述了系统组成、系统硬件接线和系统软件设计,并详细介绍了系统工作原理。该系统具有外设电路配置简单、扩展方便、操作容易、可靠性高、实用性强等特点,集电铃、路灯、宿舍楼道照明灯、教室楼道照明灯、广播、宿舍大门开启关闭、宿舍网络连接断开,实现了作息时间无人控制的自动化、科学化管理与操作。 关键词:作息时间控制 PLC I/O接线软件设计
Abstract This article introduced that one kind the daily schedule controlsystem which controls with PLC, elaborated in detail the systemcomposition, the system hardware wiring and the system softwaredesign, and introduced the system principle of work in detail. Thissystem has the peripheral device electric circuit disposition to besimple, the expansion is convenient, the operation is easy, thereliability is high, usability strong and so on characteristics,collection electric bell, street light, dormitory lamp, classroomlamp, music broadcast automatic control in a body, , has realized the daily schedulenobody control automation, the scientific management and theoperation. key word:Daily schedule control; PLC; I/Owiring; Software design
降压稳压器架构(COT降压稳压器)
4.4 恒定导通时间(COT) 降压稳压器
恒定导通时间(COT)迟滞稳压器 对于一个给定的V IN ,当负载电流变化时,导通时间是恒定的 Ripple is needed to properly switch the comparator!! R F2 R F1+ -Error Comparator Modulator V REF +- R L R C (ESR) V IN V OUT Power Stage L C One-Shot Inversely Proportional to V IN V FB ?优势 –相对于VIN 的变化频率保持恒定 –可在轻负载下实现高效率 –快速瞬态响应 ?劣势 –在反馈比较器上需要纹波–对输出噪声很敏感 (因为它转换为反馈纹波) 功率管导通时间与Vin 成反比
工作频率(连续) T ON 为导通时间,F S 为工作频率。 恒定导通时间控制器负责设定降压开关的导通时间。 K 是一个常数,R ON 是一个编程 电阻器。V IN 如预期的那样在分母当中,将导通时间设定为与V IN 成反比。 重新整理并将T ON 代入第一个公式,然后求解F S
恒定导通时间可实现接近恒定的频率 开关频率几乎是恒定的;变化是由于R DS-ON 、二极管 电压和R ON 引脚输入阻抗的影响造成的 注:一个连接在V IN 和R ON 之间的电阻器负责设定导 通时间
恒定导通时间稳压器波形(不连续) 对于COT 稳压器,假如电感器电流保持连续,则恒定频率关系式成立。在轻负载条件下,电感器中的电流将变得不连续。这里示出的是在不连续导通模式中采用恒定导通时间控制方法进行控制(这意味着斜坡电感器电流每个周期都恢复至零)的降压稳压器的开关波形。
实用电源设计Q&A 系列之二:如何采用固定导通时间控制器进行设计
实用电源设计Q&A 系列之二:如何采用固定导通时间控制器进行设计 Q1: 我需要Vcc1=-4;Vcc2=12; Vcc3=3.3;Vcc4=5几个依次供电的电源,都需从5V,3A 的电源,用dcdc变换实现,怎么实现这个方案?固定导通时间和软件设置的时间对比,有什么优势? A1: 这个问题是需要做一多路输出的开关电源,需要做一个4伏,12伏,3.3伏和5伏多路输出电源,从它需要DCDC变换器来实现看呢,它可能需要一个比较高的稳压精度。 Q2: 我们现在在做TFT-LCD的方案,用的电源部分是2576和2596的稳压芯片,但是我们发现过EMI/EMC是比较难,还有发热量是比较高的,在待机的时候电流也是比较高的,我们有些客人不太接受,这些是用11寸以下的Pannel和用在汽车里面的娱乐系统。请问各位专家你们有好的建议给我们吗? A2: 这个其实是一个比较典型的问题,是很多power design 的工程师都会面临的问题,就是发热以及EMI的解决问题,从发热的源头来考量,我们必须体现它的效率,我不知道您的输出电压的具体情况。但是假如高效率的时候,我们还是建议大家使用同步战略,NCP1582专门针对同步战略来输出,同时假如你输出电压不是很高的话,安森美有双路输出的NCP3120,一颗芯片,两路输出。还有时间上管理,很好地处理了效率的问题以及EMI的问题。 Q3: 请问100-240v-acin-5v10a-3.3v15a-12v0.5a-要求有PFC的情况下效率>80%,有无更好的方案呢?我采用如下方法可行么?PFC+PWM(半桥)+DCDC,可以么? A3: 这是一个效率问题,我们是这样认为的,我们方案是有了,PFC效率我们可以选用CRM 了,因为整个功率大概是100瓦左右,所以我们选CRM,在DCM的时候,它的效率相应来说比CCM高一点。我们input100伏的时候,效率可能达到92%到94%左右,对于PWM我们有两种选择方案,一种是半桥LLC就是半桥谐振的方案,另一种就是有源钳位的。这两个优缺点是不一样的。对LLC来说主开关损耗会小很多。它工作在零低压下面。对电流来说,输出电流是在零电流模式,这个LLC做的时候后面可能要加DC,我们会推荐大家用NCP5425,我们一个INPUT,两个输出,相位是错开的。这样的好处是前端的纹波电流会小很多,不需要LLC 提供12伏的电流很大,另外第二个方案我们会推荐有源钳位,就是我们NCP1562或NCP1282都可以做,有有源钳位的优势就是后面我们可以省掉DCDC,因为有元钳位我们可以做同步的自驱动,这样效率会提高很多。我想我们DCDC,对于400伏输入5伏和3.3伏输出这块。我想我们效率可以做到88%左右,对于LLC芯片我们用NCP1396和NCP1395,这两个有区别,1396我们把高压驱动放进去了,NCP1395就没有高压驱动。这样的话呢?优缺点就不一样了,在频率要求很高的情况下。可能用NCP1395就比较方便一点。在要求不是很严格的情况下。用NCP1396从电路上的元件数比较简单一点。NCP1395的工作频率可以达到一兆,但是你工作频率不可能跑到一兆,你开机的时候频率会跑的很高,因为LLC电路决定的,如果你开机的时候它的频率很低,那么它的开机电流会变得很大,因为你刚开机的时候相当于在短路状态下。 Q4: 斜坡起什么作用呢? A4: 斜坡的作用主要是对电流sense做一个补偿作用。当FLYBACK工作在CCM的时候,当工作在大于50%的时候,电流sense需要加个斜坡补偿,斜坡补偿主要作用就是改变电流sense,做一个补偿。 Q5: 通过检Vcc来做开环保护,响应时间是多少? A5: 如果通过检测缘边辅助电源电压,VCC来做输出的一个开环保护,这颗IC通过内部的引脚来做这个过电压开环保护,它的内部有一个低通滤波器。它的延时大约是20微妙,但是你在设计的过程中,可能会在引脚边加一个电阻做一个干扰的滤波,这个延时也应该计算进去。所以说这个延时是IC内部20微秒的一个延时加上外部阻容延时的和。 Q6: 固体导通时间和软件设置的时间对比,最大区别是什么?
恒定导通时间电流模式控制buck电路小信号分析
过u逼题 ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------满y Do路釐r 满y Do路釐r 满y Do路釐r 恶描获 提得获 度00获 D点 度得获 得感获 感得获 描0获 补度言 综难量l釐y D釐s逼r难过难高g 环u高逼t难o高 补恶言 获s高获s高 离T点恶方度得补得言 电获难高模感方获如获o模恶实恶获如To高模0实得描μs实fs模得抑0题hz 离s模恶实度u电实点o模得型度抑0u环实 综逼o模是展得 mΩ实 ()*()()*(1)*()*()s f Ton L i f fs Vin Gic f e Vc f sf Lf s f ?= =? 度 *Vo sf Ri Lf = fs 补得言 ()2***s f j f π=如 系路量釐 ( )*2 2 ()*1()()11*11s f T o n s f T o n e s f s f Q ωω?=? ++ 得 2 1Q π = 1Ton π ω=
()*()*(1()**) ()*(1)**()*()1()*()*s f Ton Vo f fs Vin Rl s f Rco Co Gvc f e Vc f sf Lf s f s f Rl Rco Co ?+= =?++ 恶 22 11*(1()**) ()*()()1()*()*11*11Rl s f Rco Co Gvc f s f s f Ri s f Rl Rco Co Q ωω+= ++++ 感 得 1*1()* 2Ton Ri k f Ls = 1*2()*2Ton Ri k f Ls =? 题得(f噪如 22()(1()**)1 1()** 2()*2()()()()*(1****11*111()* *21Vo f Rl s f Rco Co Gvc f k f Rl k f s f s f Vc f Ri Rl Co Ro Rco Co Ri Ri Q s f Rl k Ri ωω+= =??++ +? 题得(f噪 ()1()**) 2()*()1()**Vo f Rl s f Rco Co Gvc f Vc f Ri s f Rl Co +==+ 抑
可变关断时间的PWM控制IC NCP1351
固定导通时间的PWM控制IC-NCP1351 NCP1351是ONSEMI公司新推出的一款改变关断时间的小功率脱线反激变换控制IC,是目前成本最低,符合最新节能标准的电流型PWM控制器。基于固定峰值电流技朮,此控制器随负载变轻而降低开关频率,结果用NCP1351控制的AC/DC提供了极好的空载损耗,在其它负载条件下也有极佳的转换效率。当频率降低时,峰值电流大幅度减小到最大峰值的30%,以防变压器的机械谐振,音频噪音的风险极大地减小,保持了极好的待机功耗及性能。 外部调节时间的执行器监视IC的反馈活动,并保护电源防止短路或过载,一旦定时消去,NCP1351即停止开关,并锁住(A版本)或去重新起动(B版本)。 内部电路结构特色以最佳的安排,允许最低的起动电流,功能参数此时设计成极低待机功耗的电源,负向电流检测技朮减小了控制器工作的开关噪声,提供给用户可选择的有最大峰值电流(流过Rsense的),以此可将待机功耗最小化。 最后,滤波电容上的输入纹波确认自然频率,将锯齿状EMI信号弄模糊,便于通过。 总结其特色如下: * 准固定T ON,改变Toff的电流型控制。 * 极低的起动电流消耗。 * 峰值电流压缩技朮减少变压器噪声。 * 既可以在初级侧也可以在次级侧作稳压控制。 * OTP,OVP保护。 * 调节电流检测电阻的峰值电压。 * 自然频率抖动,用于改善EMI。 * 外部过功率保护(OPP)。 * 极低待机功耗。 * 芯片内部的过热保护(OTP)。 主要用于新一代PC待机电源,打印机电源及适配器,充电器等。 NCP1351典型应用电路如图1。 NCP1351 的PIN脚功能说明如下:
工作过程导向
工作过程系统化的课程开发中若干重要问题解读 ——姜大源研究员的讲座 (根据录音整理,未经本人审阅) 第一章工作过程导向——工作过程系统化 校企合作如果说是办学的模式,工学结合如果是人才培养模式,那么工作过程系统化很可能是在工学结合和校企合作情况下一个具体的课程模式。我经常说,可以没有专业,但绝对不能没有课程;可以没有教材,但绝对不可能没有课程;课程的组合就是专业,教材是没有的,拿教材教书的老师肯定不是最好的老师,只有用课程教书的老师才是最有水平的老师。所以,课程始终是教育的核心,教师要围绕着课程,而硬件建设也要围绕着课程,所以我们始终把课程看成是教育,包括这一次第一批准备验收的人才培养方案主要是课程在起作用,我们说传统的学科体系,我们现在觉得不对,不是说学科体系不好,而是说它不适合职业教育。 第一节概念解读 什么是工作过程导向,工作过程系统化。为什么我们高职认可它了,为什么我们以前做的案例课程、模块课程、项目课程、CBE能力本位,为什么都没有最终成为我们写进国家精品课程评审的标准?为什么大家都认可这个东西?这肯定有它的道理。 一、课程开发将解决的两个问题 (一)课程内容选择的标准 1、职业课程的选择标准是什么?职业课程的标准叫做理论知识够用为度,适度够用就是我们的标准。但这仅仅是每个人心中的标准,这是一个口语的表达,这不是一个科学化的表达。理论知识够用为度,适度够用不是一个标准。双证融通——是我们所说的标准,我们讲零距离对于我们劳动部制定的职业资格标准和专业部委制定的职业资格标准中作为我们课程开发的一个支撑平台,这是对的。但是如果以职业资格作为标准的话,那就意味着职业教育课程将永远滞后于职业的发展,因为先有职业才有资格,资格总是滞后于职业的发展。那么我们现在退一万步,我们起码还有职业资格作为我们课程
降压式DC-DC转换器中的恒定导通时间谷值电流模式控制
降压式DC-DC转换器中的恒定导通时间谷值电流模式控制 newmaker 恒频峰值电流控制方案使用两 个环路从高输入电压产生低输出电压,分别是电压外环和电流内环。在控制信号和输出信号之间存在最小相移,由此可以实现简单的补偿。 测量流过NMOS主开关的电感电流的典型方法是,当NMOS主开关导通时检测NMOS主开关上的压降,或者检测输入端和主开关的漏极之间的串联电阻上的压降。在这两个检测方案中,电感电流检测过程中出现在开关节点上的寄生效应均能引发激振现象,因此在测量电感电流之前必须等待一段时间,即消隐时间。在低占空比操作过程中,这使得主开关建立并保持导通的时间变少。图A示出了主开关上的电感电流和电流感测信号,其由消隐时间和导通时间构成 图A. 消隐时间指使用固定频率的峰值电流模式控制方案的降压降转换器中的主开关所能实现的最小导通 时间 在低占空比操作过程中,即在输出电压比输入电压小很多时,主开关的导通总是由内部时钟控制的,而且与反馈回路无关,因此存在最小导通时间,其将电路操作限制在较高的开关频率。而且,由于建立时间的限制,在脉冲不够宽时不能感测电流。消隐时间决定了主开关的导通时间,仅有很少的时间可用于电流感测。在诸如手机和媒体播放器的便携式应用中,DSP内核需要0.9 V的输出电压。为了减小电感的尺寸以及解决方案的整体尺寸,应使用较高的开关频率。但是如果使用该控制方案,则在使用较高的开关频率时,很难由较高的输入电压生成低占空比的电压。 后沿调制控制方案的第二个缺点是其较差的瞬态响应。图B示出了针对负载电流的正向变化和负向变化的瞬态响应的典型波形。便携式应用中,在降低输出电容器的尺寸和成本的同时必须能够实现很快的瞬态响应。在输出端出现负载电流的正向阶跃增加时,输出响应可能延迟一个时钟周期。在负载电流的负向阶跃减小的情况中,转换器强行给出最小宽度高边导通时间,其由电流控制环的速度确定。因此在负向负载瞬态变化的过程中,不可能实现最小延迟响应,而且还将发生严重的过冲和下冲瞬态现象。为了减少该现象,必须将额外的电容添加到输出端。
在连续-时间控制系统中
在连续-时间控制系统中 在连续-时间控制系统中,PID控制器应用得非常广泛。其设计技术成熟,长期以来形成了典型结构,参数整定方便,结构更改灵活,能满足一般控制要求。 数字PID控制比连续PID控制更为优越,因为计算机程序灵活性,很容易克服连续PID控制中存在问题,经修正而得到更完善数字PID算法。 本章将详细地讨论数字PID控制器设计和调试问题。 数字PID控制 数字PID控制器参数选择 连续一时间PID控制系统如图3-1所示。图中,D(s)为控制器。在PI D控制系统中,D(s)完成PID控制规律,称为PID控制器。 PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间误差时间函数。e(t)=r (t)-y(t)
(3-1)比例,积分,微分线性组合,构成控制量u(t)称为比例(Proporti onal) 积分(Integrating) 微分(Differentiation)控制,简称PID控制。 实际应用中,可以根据受控对象特性和控制性能要求,灵活地采用不同控制组合,构成 比例(P)控制器 (3-2) 比例十积分(PI)控制器
(3-3) 比例十积分十微分(PID)控制器 (3-4) 式中 KP——比例放大系数;TI——积分时间; TD——微分时间。 比例控制能迅速反应误差,从而减小稳态误差。但是,比例控制不能消除稳态误差。比例放大系数加大,会引起系统不稳定。积分控制作用是,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。因而,只要有足够时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。积分作用太强会使系统超调加大,甚至使系统出现振荡。微分控制可以减小超调量,克服振荡,使系统稳定性提高,同时加快系统动态响应速度,减小调整时间,从而改善系统动态性能。 应用PID控制,必须适当地调整比例放大系数KP,积分时间TI和微分 时间TD,使整个控制系统得到良好性能。 在电子数字计算机直接数字控制系统中,PID控制器是通过计算机PID 控制算法程序实现。计算机直接数字控制系统大多数是采样-数据控制系统。
“工作过程导向”的内涵分析
“工作过程导向”的内涵分析 摘要:课程改革是职业教育教学改革的中心环节,职业教育改革的思想和内容最终都是通过课程体现出来,因此,文章从职业教育课程开发的发展轨迹入手,分析了当前高职校课程开发中普遍使用的四种模式的特点,并针对“工作过程导向”课程开发模式,着重论述了它区别于其他模式的独特内涵和工作流程,以及目前在推广中亟待解决的问题。 关键词:工作过程导向;学习性工作任务;职业岗位分析;学习情境 所谓“工作过程导向”,是指从实际工作岗位的典型任务出发,以完成实际工作任务所需要的知识为学习内容,以培养企业所需的职业能力为目标,以实践过程的学习为主要过程的一种全新的职业教育课程开发模式。这种模式整合了理论与实践,能极大地提升学生的职业能力。 一、职业教育课程开发的发展轨迹 纵观国内外,到目前为止,职业教育的课程开发大致包括了“学科系统化”、“学习理论导向”、“职业分析导向”和“工作过程导向”等模式。 1.学科系统化的课程开发。这是我国传统的至今仍普遍使用的课程开发方法。由于我国高等职业教育是以本科为模式建立发展起来的,许多课程开发事实上都是从高校相关课程中选择“合适”的内容并按照教育对象的实际情况进行简化,编成压缩教材。这种模式可以为学生提供较好的学科理论基础,但其学习内容与职业实践的关系是间接的,有时甚至是脱节的,难以满足学生就业的需求。 2.学习理论导向的课程开发。即针对现有职业,按照学习理论和人的发展规律确定课程结构和内容。这是一种典型的从普通教育移植过来的素质教育课程开发模式,其学习内容与职业活动联系不够紧密,可以说这种课程开发模式提供的只是一种职业预备教育。如近年来流行的“宽基础活模块”和“多元整合”就属于这种课程开发模式。 3.职业分析导向的课程开发。它是建立在职业分析和工作分析基础之上的课程开发模式。美国和澳大利亚实行的DACUM法,最为典型。此法在我国被称为CBE课程模式。CBE课程开发是以职业分析为起点,但由于没有理清能力组合与工作过程间的关系,在工作分析后的“教学分析”过程中,往往又回到学科系统化的老路上。
恒导通时间控制的降压型高效率PFC研究
恒导通时间控制的降压型高效率PFC研究 杨剑友吴新科张军明钱照明 (浙江大学,浙江杭州310027) 摘要:在宽范围输入的AC/DC适配器应用场合,同传统的Boost PFC相比,Buck型功率因数校正电路能够在整个输入电压范围内保持一个较高的效率[1]。本文提出了一种工作在临界导通模式的恒导通时间型Buck功率因数校正电路,能够实现主开关的零电压(ZVS)开通。全文分析了电路的工作原理,并给出了实现高效率、低谐波电流的设计方法。同时根据所述的设计原则构建100瓦的Buck功率因数校正器,其输入电流谐波满足IEC61000-3-2(Class D)标准,在整个输入电压范围内(90Vac~265Vac)效率均在96.5%以上。 关键词:功率因数校正;Buck;临界模式;恒导通时间控制 A High Efficiency Step-down PFC with constant on time control Jianyou Yang, Xinke Wu, Junming Zhang and Zhaoming Qian (Zhejiang University, Hangzhou, 310027, China ) Abstract: In universal voltage input application, the buck PFC can achieve high efficiency in the entire universal input voltage range compare to boost PFC[1]. A critical conduction mode (CRM) ZVS buck converter with constant on-time control is proposed in this paper. This paper analyses the operation principle of the circuit and the design methodology and criteria for high efficiency and low harmonics of the CRM buck AC-DC converter are presented. A 100-W prototype designed according to the proposed design criteria shows that the input current harmonics meet the IEC61000-3-2 (Class D) standard and the efficiency is higher than 0.965 during the universal input range. Keywords:Power Factor Correction; Buck; CRM; Constant-on time control 1 引言 由于目前大多数用电设备中的非线性元件和储能元件的存在会使输入交流电流波形发生严重畸变,网侧输入功率因数很低,为了满足国际标准IEC61000-3-2的谐波要求[2],必须在这些用电设备中加入功率因数校正电路(Power Factor Correction-PFC)。传统的有源PFC电路一般用Boost拓扑,这是因为Boost电路具有控制容易、驱动简单并且理论上实现输入电流可以完全跟踪输入电压。但是Boost电路具有输出电压高的缺点,而且在宽范围输入(90Vac-265Vac)条件下,在低电压输入时效率会比高压输入时下降1.5%-2%。在小功率AC/DC应用场合(<150W),降压(Buck)拓扑能够在整个输入电压范围内保持较高效率。更重要的时,由于AC/DC适配器应用中的散热设计都是根据效率最低点来设计的,因此boost功率因数校正器在输入低压时的低效率,成为严重制约适配器的功率密度和效率提高的瓶颈。而Buck拓扑应用在AC/DC时效率不会随输入电压有很大的变化,因此热设计也相对简单,能够实现高的功率密度。 采用Buck电路作为功率因数校正器在文献[3]-[5]中已经被提出,文献中所采用的控制方法都为定频率PWM控制。文献[1]中提出的是电流箝位Buck(clamped-current buck,CCB),其工作原理为普通的峰值电流控制方式加上变斜率的斜波补偿实现。但是在电压峰值附近处电流会处于连续工作状态,造成二极管的反向恢复损耗,而且输入电流的功率因数很难在全电压输入范围内都保持在0.9以上。本文中所述的Buck PFC采用恒导通时间法的临界模式控制(Critical Mode-CRM),使Buck 电感电流下降到零时开通开关管,每个周期导通时间恒定,由于其没有二极管的反向恢复问题,同时在开关管开通前漏源极电压通过结电容与电感的谐振,实现零电压开通,其效率较高。 2 Buck PFC分析与优化设计 2.1 恒定导通时间Buck PFC的控制原理 图1所示为临界模式Buck PFC的系统框图,当过零检测电路检测到电感电流下降到零时开通开 关管,此时比较器的正端锯齿波信号开始上升,当锯齿波信号达到运放的输出电压V EAO的时候,比较器输出高电平,开关管关断。由于锯齿波的上升斜率是恒定的,V EAO在一个工频周期内可以视为固定值,
二建管理时间控制知识点
施工管理有关时间数据 1、在紧急情况下为确保施工安全和人员安全,在无法与发包人代表和总监及时取得联系时,项目经理有 权采取必要的措施保证与工程有关的人身、财产和归本工程的安全,但应在48小时内向发包人代表和总监提交书面报告。P31 2、承包人需要更换项目经理的,应提前14天书面通知发包人和监理人,并征得发包人书面同意。P31 3、发包人要求更换项目经理的,通知中应载明更换的理由。承包人在接到更换通知14天内向发包人提 出书面改进报告。发包人在收到改进报告后仍要求更换的,承包人应在接到第二次更换通知的28天内进行更换,并将新任命的项目经理的注册资格及管理经验等资料书面通知发包人。P31 4、项目经理应特殊原因授权其下属履行某项工作职责的,该下属应具备相应职能的能力,并应提前7天 将上述人员的姓名及授权范围书面通知监理人,并征得发包人同意。P31 5、施工企业根据监理企业制度的旁站监理方案,在需要实施旁站的关键部位、关键工序进行施工前24 小时,书面通知监理单位。P46 6、合同价款的约定:在中标通知书发出之日起30天内,由发承包单位依据招标文件和中标人的投标文 件在书面合同中约定。P73 7、合同计量程序:承包人应于每月25日向监理人报送上月20日至当月19日已完成工程量并附具进度 付款申请单,已完成工程量报表及有关资料。监理人应在收到承包人提交的工程量报告后7天内完成审核,存在异议的,要求承包人进行共同复核或抽样复测,承包人未按要求参加复核或抽样复测的,监理人复核或修正的复测工程量视为承包人实际完成的工程量。P75 8、施工合同出现的法律法规引起的合同价款调整问题,招标工程以投标截止日前28天,非招标工程以 合同签订前28天为基准日。P77 9、工程发包时,招标人应根据相关工程的工期定额合理计算工期,压缩的天数不得超过定额工期的20%, 超过者,应在招标文件中明示增加赶工费用。P83 10、预付款的支付按照专用合同约定执行,但至迟应在开工通知载明的开工日期7天前支付。发包人要求 承包人提供预付款担保的,承包人应在发包人支付预付款7天前提供预付款担保。发包人应在开工后28天内预付安全文明施工费总额的50%。P88 11、进度款的支付,监理人应在收到承包人进度款申请单及相关资料的7天内完成审查并报送发包人,发 包人应在收到后7天内完成审批并签发进度款支付证书。发包人逾期未完成审批且未提出异议的,视为已签发。P89 12、结算款的支付,承包人应在工程竣工验收合格后28天内向发包人和监理人提交竣工结算申请单并提 交完整的结算资料。发包人在28天内未完成审批且未提出异议的,视为发包人认可承包人提交的竣工结算申请单,发包人在签发竣工付款证明后的14天内应完成对承包人的竣工付款,逾期支付超过56天的,按照中国人民银行发布的同期同类贷款基准利率的2倍支付违约金。P92 13、最终结清,承包人应在缺陷责任期终止证书颁发的7天内提交最终结清申请单并提供相关证明材料, 发包人在收到资料后的14天内完成审批并颁发最终结清证书,且在颁发最终结清证书的7天内完成支付,逾期支付超过56天的,按2倍支付违约金。P93 14、质量保证金的退还,发包人在收到承包人返还保证金申请后,应于14天内会同承包人按照合同约定 内容进行核实,如无异议,发包人按照合约将保证金返还承包人。P94 15、因不可抗力导致合同无法履行连续超过84天或累计超过140天的,发包人和承包均有权解除合同。 P95 16、除专用合同条款外,承包人按《示范文本》“发包人违约的情形”,条款约定暂停施工满28天后,发包 人仍不纠正违约行为并致使合同目的不能实现的,或发包人明确表示或其行为表明不履行合同主要义务的,承包人有权解除合同,发包人应承担因此增加的费用,并支付承包人合理的利润。P95 17、建设单位应当在工程竣工验收7个工作日前将验收的时间、地点及验收组名单书面通知负责监督该工 作的工程质量监督机构。P174 18、施工质量事故发生后,现场有关人员应立即向建设单位负责人报告,建设单位接到报告后,应于1小 时内向事故发生地县级人民政府住房和城乡建设主管部门报告。P179 19、质量监督机构按照监督方案对工程项目全过程施工的情况进行不定期检查,检查内容为:各参建方的 质量行为及质量责任制的履行情况,工程实体质量和质量控制资料的完成情况,其中对基础和主体结构的施工每月安排监督检查。P183 20、安全生产许可证的有效期为3年,企业应当于期满前3个月向原安全生产许可证颁发管理机关办理延 期手续。P196 21、当企业内部员工调岗、换工种或放长假离岗1年以上重新上岗的情况,企业必须进行相应的安全技术 培训。P198 22、特种作业操作证3年复审一次,连续从事本工种10年以上的,经用人单位进行知识更新教育后,可 延长每6年一审,离岗6个月的特种作业人员,应当重新进行实际的操作考核。P199 23、施工单位应当自施工起重机械和整体提升脚手架、模板等自升式架设设施验收合格之日起30日内, 向建设行政主管部门或其他有关部门登记。P200 24、施工单位应当制定本单位的应急预案演练计划,每年至少组织一次综合应急预案演练或专项应急预案
浅析基于工作过程导向的任务驱动教学方法
浅析基于工作过程导向的任务驱动教学方法 摘要:如何让学生在掌握理论知识的同时提升实践能力,是技工学校教育教学的一项重要内容。本文以机械基础课程教学中的减速器拆装为例,探讨基于工作过程导向的任务驱动教学法在机械基础课程教学中的应用。以工作过程为导向,设置“全真+仿真”的工作环境,优化教学方法,培养学生的探究意识、训练学生的机械思维和提高学生的动手能力。 关键词:任务驱动教学减速器拆装评价激励 经济的高速发展为机械专业学生提供了良好的就业机会,同时也提高了对学生专业技能的要求。新课改背景下的课堂教学与传统课堂教学有了较大区别,因此学校及教师要根据实际需要,不断更新教学内容,改进教学方法,培养学生的综合职业能力。笔者在多年的机械基础课程教学实践中发现,基于工作过程导向的任务驱动教学法对培养学生的探究意识、机械思维和动手能力有重要 意义。 一、基于工作过程导向的任务驱动教学法的概念界定 基于工作过程导向的任务驱动教学法是以工作任务为载体,将教学过程与工作过程有机融合,使学生在教学(模拟)情境中,通过完成任务获得知识与技能,从而提高职业能力的一种教学方法。工作任务,亦区别于常规的趣味性任务,是把教学目标进行有效组织,形成具有职业性的工作任务。因此,基于工作过程导向的任
务驱动教学法以工作任务为明线、培养学生的专业技能和职业能力为暗线。下面以装拆zdy型减速器为例,浅谈基于工作过程导向的任务驱动教学法在机械基础课程教学中的应用。 二、基于工作过程导向的任务驱动教学法课例剖析 1.项目名称 拆装zdy型减速器 2.项目背景分析 减速器拆装在传统教学中略有涉及,通常先由老师讲解拆装要点,接着示范操作,学生很难真正参与其中。根据笔者多年的教学经验,学习减速器拆装对机械基础的学习有很大助益。 减速器拆装是继学习轴及轴系零件、齿轮传动和蜗杆传动之后的综合应用。它既是前面所学内容的运用和实际演练,又为深入学习机械基础提供了理论基础。教师通过研究学习,不但要解决理论问题,还必须解决实际操作的问题,从而培养学生动手、分析和探究能力。 3.教学资源准备 教学设备:减速器拆装多媒体软件、任务书(实训报告)与引导文、机械设计手册每小组一本、单级直齿圆柱齿轮减速器每小组一台拆卸及测量工具:活动扳手,螺丝起、木锤、游标卡尺、钢尺、内外卡钳等工具。
利用固定导通时间控制器进行设计,优化开关电源轻载能效
http://www.powersystems.eetc 利用固定导通时间控制器进行设计,优化开关电源轻载能效 由于拥有较高的效率和较高的功率密度,开关电源在现代电子系统中的使用越来越普及。特别是随着控制芯片的应用,开关电源的电路设计得到了极大的简化,往往只需要在脉宽调制(PWM)控制芯片的基础上再加一些外围器件即可组成开关电源,这更加促进了开关电源的设计和发展。从种类来看,开关电源主要包括交流-直流(AC-DC)转换器和直流-直流(DC-DC)转换器两大类型。前者是将输入为50/60 Hz的交流电经过整流、滤波等步骤将其转换为直流电压,后者广泛用于对系统中的直流电源进行转换和分配。 根据拓扑结构的不同,DC-DC转换器包括降压(Buck)、升压(Boost)、降压-升压(Buck-Boost)、反激(Flyback)、正激(Forward)、推挽(Push-Pull)、半桥(HB)和全桥(FB)等不同类型。不同类型DC-DC转换器的特点各不相同,并且往往有着不同的适用领域。例如,降压、升压和降压-升压转换器非常适合于无需电气隔离的低压控制应用,而反激式转换器则非常适合多输出、高电压的电源应用,这些应用中使用的离线式开关电源工作在110 V/220 V主电源,并通过使用变压器来取代滤波电感从而实现电气隔离。 对于离线式开关电源而言,低成本是它的一个重要目标。对于其中所用的PWM 控制器而言,设计人员可以选择不同的架构,如固定频率(FF)和准谐振(QR)等。对于前者而言,它的开关频率固定,其轻载能效和满载能效都处于正常范围,工作模式方面可以是连续导电模式(CCM)或非连续导电模式(DCM)。对于后者而言,它的开关频率可变,其满载能效最佳,但在轻载时则由于谷底跳变问题(噪声),它的工作模式是边界导电模式(BCM,亦称临界导电模式,CRM)。在变压器尺寸方面,固定开关频率架构属于正常,而准谐振架构则较大;但准谐振架构的电磁干扰较小,而固定开关频率架构则较大。对于这两种架构而言,都面临着相同的问题,就是必须提升在更宽输入负载范围下的能效,并改善待机能效。 除了这两种架构,固定导通时间(FON)架构近年来越来越多地受到业界瞩目。在这种架构下,峰值电流保持恒定,且可由用户选择;而开关频率则会变化(改变关闭时间),以提供所需的输出功率,它在频率最高时提供的输出功率也就最大。FON的工作原理如图1所示。
第三章连续时间控制系统的时域分析自测题
第三章 连续时间控制系统的时域分析 自测题 1. 已知二阶系统的单位阶跃响应为 1.2()101 2.5sin(1.65 3.1)t h t e t =?+,此系统的自然频率 是 ,阻尼比是 。 2. 某系统动态结构图及单位阶跃响应曲线如下图所示。若误差定义如图,已知其单位阶跃 输入下的误差响应为(2(2()0.5()t t e t e e ??=+。试确定参数,,,k p a b 的值。 (c t 3. 系统如图a 所示,其反馈和局部反馈均不知。如果测得系统的阶跃响应曲线如图b 所示,这是的反馈极性为( )。 A.局部反馈断开,主反馈为负反馈; B.局部反馈为正反馈,主反馈为负反馈; C.局部反馈为负反馈,主反馈断开; D.局部反馈断开,住反馈断开 (c t 4. 设系统如图所示,试求: (1)当0,8a K ==时,确定系统的阻尼比,无阻尼自然震荡频率n ω和()r t t =作用下系统的稳态误差;
(2)当8,0.7K ξ==时,确定参数a 的值和()r t t =作用下系统的稳态误差; (3)在保证0.7,0.25sse e ξ==的条件下,确定参数a 和K 的值。 5. 控制系统如下方框图所示 ,试求: (1)当125,0f K K ==时,系统的阻尼系数ζ,无阻尼自然震荡频率n ω和单位斜坡输入作用下系统的稳态误差ss e ; (2)当125,4f K K ==时,重复(1)的要求; (3)要使系统阻尼系数0.7ζ=,单位斜坡输入信号作用下系统的稳态误差0.1ss e =,试确定1,f K K 的值,并计算在此参数情况下,系统的单位阶跃响应的超调量、上升时间和调整时间。的值,并计算在此参数情况下,系统的单位阶跃响应的超调量、上升时间和调整时间。
关于IGBT导通延迟时间的精确测量方法
关于IGBT导通延迟时间的精确测量方法 引言 ?绝缘栅双极型晶体管(IGBT)是GTR和MOSFET的一种新型复合器件,自问世以来就以输入阻抗高,开关速度快,通态压降低,阻断电压高,承受电流大等优点成为当今功率半导体器件中的主流开关器件,并广泛应用于多领域的工程实践当中。目前,IGBT的导通延迟时间可以达到几百纳秒,甚至更低。但在某些对器件时间特性要求较高的工程应用中,需要更精确地确定IGBT的导通延迟时间。因而高精度的测量时间间隔是测量领域一直关注的问题。本文从精简结构,同时兼顾精度的角度出发,提出一种基于时间测量芯片TDC-GP2来精确测量IGBT导通延迟时间系统,用于测量IGBT的导通延迟时间,实现简单且成本低的一种较为理想的测量方案。 ?1 TDC-GP2的特性分析 ?TDC-GP2是德国ACAM公司继TDC-GP1之后新推出的一款高精度时间间隔测量芯片。与前代芯片相比,具有更高的精度、更小的封装和更低的价格,更适合于低成本工业应用领域。TDC-GP2内部结构,如图1所示。 ? ?该系统主要由脉冲产生器、数据处理单元、时间数字转换器、温度测量单元、时钟控制单元、配置寄存器以及与单片机相接的SPI接口组成。在实际应用中,由于TDC-GP2的功耗很低,使得TDC-GP2的输入/输出电压(工作电压)为1.8~5.5 V,核心电压为1.8~3.6 V,所以可以采用电池供电,使用方便。同时单片机由4线的SPI接口相连,可以把TDC-GP2作为单片机的一个外围设备来操作。通过内部ALU单元计算出时间间隔,并将结果送入结果寄存器保存起来。通过对TDC-GP2内部寄存器的设置,可以多次
在连续时间控制系统中
在连续时间控制系统中 WTD standardization office【WTD 5AB- WTDK 08- WTD 2C】
在连续-时间控制系统中,PID控制器应用得非常广泛。其设计技术成熟,长期以来形成了典型的结构,参数整定方便,结构更改灵活,能满足一般的控制要求。 数字PID控制比连续PID控制更为优越,因为计算机程序的灵活性,很容易克服连续PID控制中存在的问题,经修正而得到更完善的数字PID算法。 本章将详细地讨论数字PID控制器的设计和调试问题。 数字PID控制 数字PID控制器参数选择 连续一时间PID控制系统如图3-1所示。图中,D(s)为控制器。在PID控制系统中,D(s)完成PID控制规律,称为PID控制器。 PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差的时间函数。e(t)=r(t)-y(t) (3-1)的比例,积分,微分的线性组合,构成控制量u(t)称为比例(Proportional) 积分(Integrating) 微分(Differentiation)控制,简称PID控制。 实际应用中,可以根据受控对象的特性和控制的性能要求,灵活地采用不同的控制组合,构成 比例(P)控制器 (3-2) 比例十积分(PI)控制器 (3-3) 比例十积分十微分(PID)控制器 (3-4) 式中 KP——比例放大系数;TI——积分时间; TD——微分时间。 比例控制能迅速反应误差,从而减小稳态误差。但是,比例控制不能消除稳态误差。比例放大系数的加大,会引起系统的不稳定。积分控制的作用是,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。积分作用太强会使系统超调加大,甚至使系统出现振荡。微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。 应用PID控制,必须适当地调整比例放大系数KP,积分时间TI和微分时间TD,
网络综合布线“六步法”以工作过程为导向教学模式的实践报告
网络综合布线“六步法”以工作过程为导向 教学模式的实践报告 摘要:德国的”工作过程导向”教学法作为目前世界上职业教育界最先进的人才培养模式于本世纪初被引入我国国家示范性职业院校,并得到了迅速推广。我们把工作过程的”六步法”原则融入网络综合布线课程的5个工作项目当中,在实际教学过程中收到了事半功倍的教学效果。 关键词:工作过程导向六步法综合职业能力工作页 人们在各个职业领域的工作内容和所扮演的角色虽各不相同,但完成工作任务的步骤却基本上都是由“资讯―计划―决策―实施―检查―评估” 6个工作过程构成的,这就是德国联邦职教所BIBB 以工作过程为导向的“六步法”。 利用国家建设示范性中等职业学校的契机,我们把以工作过程为导向的“六步法”引入到了我校计算机网络专业的综合布线课程中。组织网络专业教师经过实地调研、专家访谈和顶岗实习等方式,汇总并提炼出了网络综合布线行业几个具有代表性的典型工作任务。在把这些典型的工作任务转化成我们网络综合布线学习领域的5个从简单到复杂的综合布线项目:“两机互联、办公室布线、机房布线、楼宇布线、园区布线”。
下面我们给读者简单介绍一下学生是如何在工作页的引导下,按照“六步法”的工作步骤,一个一个地完成上述5个综合布线项目的工作任务的。 一、获取信息(资讯) 1、学生通过阅览合同、派工单、任务书或教师口授等方式明确工作任务。 2、通过与客户的语言交流或其他形式的探访,获取客户对项目的要求等信息。各小组成员用角色扮演法上台表演客户、设计人员、施工人员和项目经理等角色,培养学生工作过程中的人际沟通能力(重点帮助学生克服腼腆、害羞、紧张、怯懦等职场沟通过程中的心理障碍)。 3、知识准备。学生自行以查阅产品说明书、阅读相关教材、收看视频资料、搜索互联网信息、询问同事(同学)、求教老师等方式,获取该项目设计、施工和测试的相关知识和经验,并预先认识各类布线耗材,掌握工具的用法、熟悉设备的性能参数。 4、到工程现场或模拟实训场地进行实地勘察测量,获取项目设计与实施的各项相关数据,尤其是场地布局、距离尺寸、信息点数量等。制作完成综合布线的信息点统计表。 二、制定计划 依据已获取的客户需求信息和现场勘测数据,规划设计出该项目一个初步可行的施工方案。网络综合布线的方案