有限元网格划分及发展趋势_古成中

有限元网格划分及发展趋势*
古成中+,吴新跃
GUChengzhong+,WUXinyue
海军工程大学船舶与动力学院,武汉430033
CollegeofPowerEngineering,NavalUniversityofEngineering,Wuhan430033,China+Correspondingauthor:E-mail:charminggu@126.com
GUChengzhong,WUXinyue.AreviewofFEMandtrendofdevelopment.JournalofFrontiersof
ComputerScienceandTechnology,2008,2
(3):248-259.Abstract:Thispapersummarizesthedevelopmentofsearchinmeshgenerationforfiniteelementcomputationinlasttenyears.Firstly,theprincipleofmeshingisresearched.Secondly,themainresearchfields,suchasmappingmethods,grid-basedapproach,pointdistributionandtriangulationapproach,topologydecompositionapproach,geometrydecompositionapproach,sweepingapproach,arediscussedandclassified.Unitingin-stances,itanalysessystematicallytheprinciple,characteristicsandscopesofthesemethods.Thirdly,thefrontedgeisnarratedandhexahedralmeshisreviewed.Finally,thispaperprospectsthetrendFEM.Keywords:finiteelementmeshgeneration;mappingapproach;grid-basedapproach;pointdistributionandtriangulationapproach;topologydecompositionapproach;geometrydecompositionapproach;sweepingap-proach;hexahedralmesh
摘要:总结近十年有限元网格划分技术发展状况。首先,研究和分析有限元网格划分的基本原则;其次,对当
前典型网格划分方法进行科学地分类,结合实例,系统地分析各种网格划分方法的机理、
特点及其适用范围,如映射法、基于栅格法、节点连元法、拓扑分解法、几何分解法和扫描法等;再次,阐述当前网格划分的研究热点,综述六面体网格和曲面网格划分技术;最后,展望有限元网格划分的发展趋势。
关键词:有限元网格划分;映射法;基于栅格法;节点连元法;拓扑分解法;几何分解法;扫描法;六面体网格文献标识码:A
中图分类号:TP319.72
*theScientificResearchofMilitary(军内科研项目).Received2007-08,Accepted2008-04.
ISSN1673-9418CODENJKYTA8
JournalofFrontiersofComputerScienceandTechnology1673-9418/2008/02(03)-0248-12
DOI:10.3778/j.issn.1673-9418.2008.03.003
E-mail:fcst@public2.bta.net.cn
http://www.ceaj.orgTel:+86-10-51616056
1引言
作为有限元走向工程应用枢纽的有限元网格划分,是有限元法的一个非常重要的研究领域,经历了40多年的发展历程。有限元网格划分算法研究中的某些难点问题始终未能得到真正意义上的解决,它们的解决对工程问题具有重要的现实价值和理论意义。有限元分析的基本过程可分为三个阶段:有限元模型的建立(即前处理)、有限元解算、结果处理和评定(即后处理)。根据经验,有限元分析各阶段所用的时间为[1]:40%-45%用于模型的前处理,50%-55%用于后处理,而分析计算只占5%左右;更有文献[2]指出有限元建模占有限元分析一半以上的工作量,甚至高达80%。因此,有限元分析的前后处理一直都是有限元分析的瓶颈问题,严重地阻碍着有限元分析技术的应用和发展。
许多学者对有限元网格生成方法近30年的研究进行了概括和总结[3-12],对某些重要分支领域的研究进展方面也做出了贡献[13-20]。近年来,有限元网格生成方法研究有两个显著特点:(1)经历了一个进化过程,一些方法的研究与应用出现停滞,而另外一些方法在不断地深入、完善和发展,成为适应性强、应用范围广泛的通用方法;(2)领域和主题在不断扩展和深入,研究重点由二维平面问题转移到三维曲面和三维实体问题,从三角形、四面体网格自动生成转移到四边形、六面体网格自动生成。
2有限元网格划分的基本原则
有限元方法的基本思想是将结构离散化,即对连续体进行离散化,利用简化几何单元来近似逼近连续体,然后根据变形协调条件综合求解。所以有限元网格的划分一方面要考虑对各物体几何形状的准确描述,另一方面也要考虑变形梯度的准确描述。为正确、合理地建立有限元模型,这里介绍划分网格时应考虑的一些基本原则。
2.1网格数量
网格数量直接影响计算精度和计算时耗,网格数量增加会提高计算精度,但同时计算时耗也会增加。
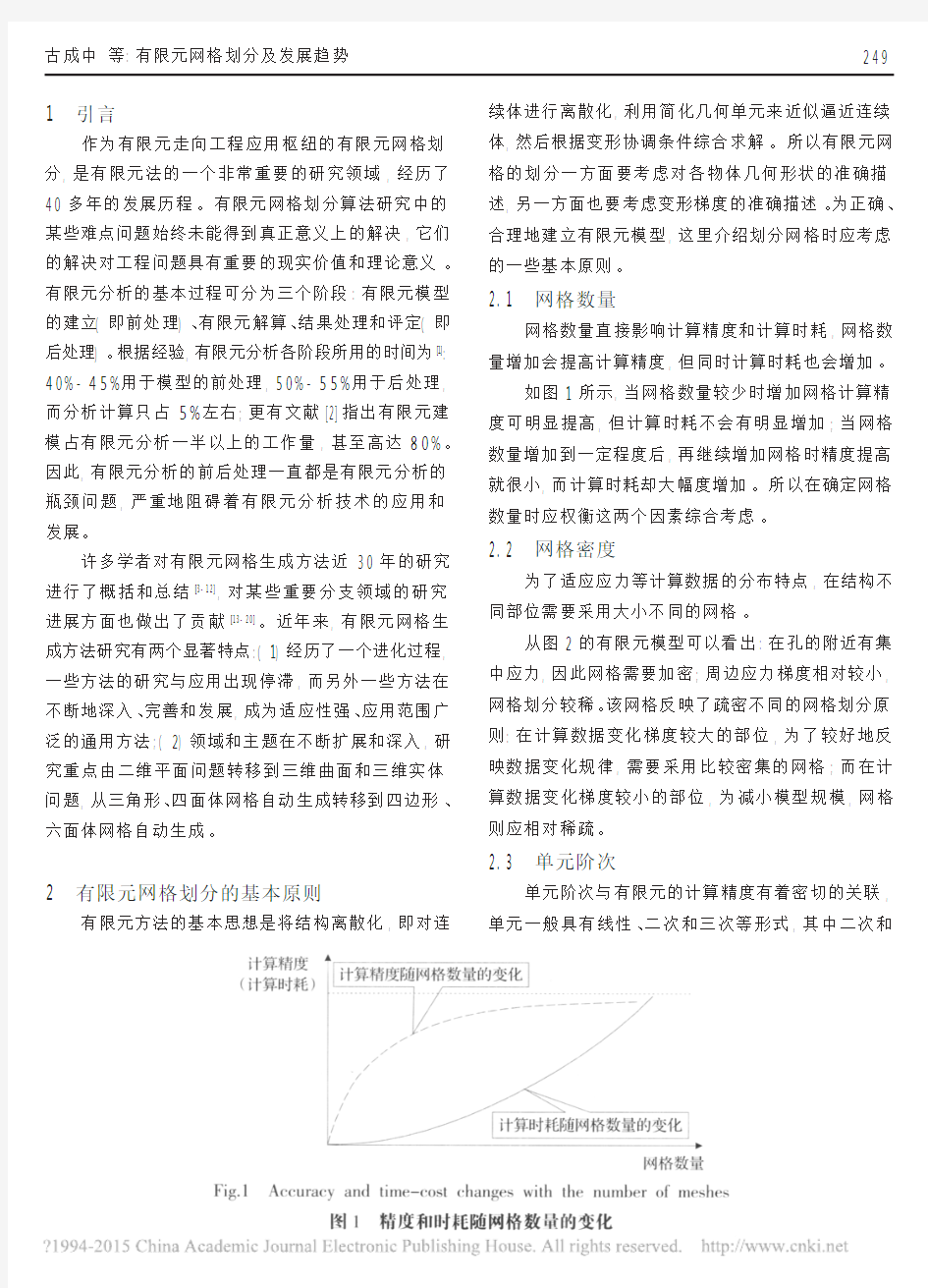
如图1所示,当网格数量较少时增加网格计算精度可明显提高,但计算时耗不会有明显增加;当网格数量增加到一定程度后,再继续增加网格时精度提高就很小,而计算时耗却大幅度增加。所以在确定网格数量时应权衡这两个因素综合考虑。
2.2网格密度
为了适应应力等计算数据的分布特点,在结构不同部位需要采用大小不同的网格。
从图2的有限元模型可以看出:在孔的附近有集中应力,因此网格需要加密;周边应力梯度相对较小,网格划分较稀。该网格反映了疏密不同的网格划分原则:在计算数据变化梯度较大的部位,为了较好地反映数据变化规律,需要采用比较密集的网格;而在计算数据变化梯度较小的部位,为减小模型规模,网格则应相对稀疏。
2.3单元阶次
单元阶次与有限元的计算精度有着密切的关联,单元一般具有线性、二次和三次等形式,其中二次和
古成中等:
有限元网格划分及发展趋势249
JournalofFrontiersofComputerScienceandTechnology计算机科学与探索
2008,2
(3)三次形式的单元称为高阶单元。高阶单元的曲线或曲面边界能够更好地逼近结构的曲线和曲面边界,且高次插值函数可更高精度地逼近复杂场函数,所以增加单元阶次可提高计算精度。但增加单元阶次的同时网格的节点数也会随之增加,在网格数量相同的情况下由高阶单元组成的模型规模相对较大,因此在使用时应权衡考虑计算精度和时耗。
2.4单元形状
网格单元形状的好坏对计算精度有着很大的影
响,单元形状太差的网格甚至会中止计算。在网格划分时应保证合理的单元形状,即使只有一个单元形状很差或畸形(畸形网格通常有单元节点交叉编号、节点重合、内角大于180°和单元面积为零等类型)时,也可能给计算结果带来很大的误差,甚至使得计算无法进行下去。单元形状评价一般有以下几个指标:
(1)单元的边长比、
面积比或体积比以正三角形、正四面体、正六面体为参考基准,理想单元的边长比为1,线性单元可接受的边长比小于3,二次单元小于10。
(2)扭曲度:单元面内的扭转和面外的翘曲程度。(3)节点编号:节点编号对于求解过程中总刚矩阵的带宽和波前因数有较大的影响,从而影响计算时耗和存储容量的大小。因此合理的节点编号有利于刚度矩阵对称、带状分布等求解效率,从而提高计算速度。
2.5单元协调性
单元协调是指单元上的力和力矩能够通过节点
传递给相邻单元。
为保证单元协调,必须满足的条件是:
(1)一个单元的节点必须同时也是相邻单元的节点,而不应是内点或边界点。
(2)相邻单元的共有节点具有相同的自由度性质。例如SHELL和SOLID两种单元,前者为六自由度,而后者为平动三自由度,所以SOLID只能向SHELL传递平动位移,不能传递转动位移。
另外,有相同自由度的单元网格也并非一定协调。例如,BEAM3和SHELL41都具有三个自由度,但
BEAM3具有三个平动自由度,SHELL41有两个平动
自由度和一个转动自由度,所以SHELL41只能向
BEAM3传递平动位移,却不能传递转动位移。
3网格生成通用方法回顾
有限元网格划分方法难以准确分类,分类方法有
很多,可以按产生的单元类型、生成单元的维数、自动化程度等进行分类。而且目前的网格生成法分类中,对某一具体的网格生成法叫法不一致,如有人将拓扑分解法叫做结构分解法,将节点连元法叫做填充法。本节仅对众多网格划分方法中的典型方法的算法思想进行回顾和总结。
3.1映射法
映射法的基本思想是实际图形与标准图形的双
向映射,如图3所示,具体有三个步骤:
(1)根据形体边界的参数方程,利用适当的映射函数,将待划分的物理域映射到参数空间,形成规则参数域;
(2)对参数域进行网格划分
;
250
(3)将参数空间内单元的网格反向映射到欧氏空间,从而生成实际的网格。
映射法可分为三大类:保角映射法(conformalmappingmethod)[21-23]、基于偏微分方程法(PDE-basedmethod)[24-29]、代数插值法(algebraicinterpolationmethod)[30-33]。保角映射法能够直接处理单连域问题,但难以控制单元形状和单元密度,且不能直接应用于三维问题。基于偏微分方程法由Thompson等[24,25]提出,它利用偏微分方程寻找参数空间与物理空间之间的映射关系。代数插值法是通过代数插值来描述参数空间与物理空间之间的映射关系,它是一种应用相当广泛的网格划分方法。
映射法的优点是算法简单、计算效率高、单元质量好、密度可控制、网格分布均匀,能够用以进行曲面网格的生成。
这种网格控制机理有以下几个缺点:
(1)映射法不是完全面向几何特征的,所以很难完成自动化,尤其是对于3D区域;
(2)网格局部控制能力差;
(3)各映射块之间的网格密度相互影响程度很大,改变某一映射块的网格密度,其它映射块的网格都要做相应的调整;
(4)对于形状较为复杂的形体适应性差,要求事先根据所要产生的网格类型将目标域分割成一系列可映射的子区域。子域分解繁琐,所需人工交互多,难以实现网格自动的生成。
3.2基于栅格法
基于栅格法(Grid-basedApproach)也叫空间分解法,最早由Thacker等[34]提出。该算法的基本流程:首先用一组不相交的栅格(cells)覆盖在物体之上,既可在栅格的规则点处布置节点,也可在栅格单元中随机布置节点;再对栅格和物体进行相交检测,保留完全或部分落在目标区域之内的栅格,删除完全落在目标区域之外的栅格;然后对与物体边界相交的栅格进行调整、剪裁、再分解等操作,使其更准确地逼近目标区域;最后对内部栅格和边界栅格进行栅格级的网格剖分,进而得到整个目标区域的有限元网格。
基于栅格法又可分为正则栅格法(RegularGridMethod)和有限四(八)叉树法(FiniteQuad-tree/Oc-treeMethods)两大类。正则栅格法采用尺寸相同的正则栅格覆盖目标区域,栅格越密,网格质量将越好。这种方法不足之处是所生成的网格与所选择的初始栅格及其取向有关,网格边界单元质量差;优点是原理简单,适用于二维和三维物体,对于相对规则的问题区域是一种简单有效的方法。
目前有限四(八)叉树方法已成为最成功有效的网格生成方法之一,是由Yerry和Shephard[35]首先提出的。在四(八)叉树空间分解方法中,首先用尽可能小的方盒圈定目标区域,然后将这个方盒分解成四(八)个子区域,测试每个子域是否完全在目标区域外面以及是否满足密度控制的要求,若满足所给定的条件则停止对此子域的细分,否则继续细分,该过程迭代执行下去直到达到预定的离散要求。在细分过程中,相邻的子域最多只能相差一级的分划水平。这样就使得目标区域被一些相互不重叠的各种大小的方形子域拼成的图形所逼近,这些子域是由最初的方盒分解而成。
虽然有限四(八)叉树方法已经取得了相当大的成功,它适用于任何复杂的二维和三维区域问题,而且算法效率几乎与单元节点数呈线性增长,其网格密度容易控制,自适应性强,而且容易同实体造型系统相结合,但它也存在严重的缺点:所生成网格与所选择的初始栅格及其取向有关,网格边界单元质量差,程序实现相当复杂,所需内存较大,不利于实现并行处理等。Baehmann等人及Shpitalni[36]提出的“修正的八叉树法”容易生成高质量的单元,产生的网格具有阶梯结构和空间可访问性,可以实现与实体造型系统的集成,而且易于精整网格质量。
3.3节点连元法
节点连元法一般分为两步:(1)在物体的边界和有效区域内按照网格密度的要求均匀布点;(2)根据一定的准则将这些节点连接成三角形或四面体网格。最早提出的节点生成法是随机布点法[37],该方法不能保证布点的均匀性,同时为了确定可用节点,要进行点
古成中等:有限元网格划分及发展趋势251
JournalofFrontiersofComputerScienceandTechnology计算机科学与探索2008,2(3)
距检查和多次试探,算法效率低。近年出现的长方形网格直接布点法[38]、等距水平扫描线直接布点法[39]等方法在一定程度上提高了节点连元法的计算效率,但Delaunay三角剖分方法(简称DT法)的出现才真正使得节点连元法成为目前主流的全自动网格划分方法之一。
DT有两个重要特性:最大-最小角特性和空外接圆特性。DT的最大-最小角特性使它自动地避免了生成小内角的长薄单元,因此特别适用于有限元网格生成。空外接圆特性,是指在DT中的每个三角形单元或四面体单元的外接圆(二维)或外接球(三维)都不包含其它节点。
DT方法仅适用于凸区域,对于非凸区域则不能保证其边界的完整性,因此对非凸区域必须引入一个恢复边界的步骤。但恢复了边界完整性的三角剖分并不能严格满足Delaunay准则,因此称为约束DT。
二维网格剖分的边界恢复比较简单,并且有明确的理论保证边界恢复结果是收敛的。常见的恢复算法有:George等提出的边交换法[40]和GeorgePL等提出的最近点连线法[41],但这两种算法不能直接扩展到三维域。三维域的边界由一系列三角形面片组成,其边界恢复基本上可分成两步:(1)恢复边界的边;(2)恢复边界的面。比较常用的三维域边界恢复算法有:装订法[42]、分治算法[43]等。
3.4拓扑分解法
拓扑分解法(TopologyDecompositionApproach),它首先是由英国剑桥大学的Wordenwaber[44]提出来的。拓扑分解法是从形体的拓扑因素着手进行分割,而不过问元素的具体形状。首先假设网格顶点全部由目标边界顶点组成,那么可以用一种三角化算法将目标用尽量少的三角形完全分割覆盖。该方法生成的网格一般相当粗糙,必须与其它方法相结合,通过网格加密等过程,才能生成合适的网格。
拓扑分解法的原理简单,易于处理,但它只从拓扑关系入手,不考虑几何因素,因此难以获得良好形状的单元网格,也不适用于含有曲面的三维形体。该方法现在已普遍使用于目标初始三角化,用来实现从实体表述到初始三角化表述的自动化转换。3.5几何分解法
几何分解法(GeometryDecompositionApproach)最大的特点是节点和单元同步生成。该方法较多地考虑了待分域的几何特征,确保生成质量较好的网格单元。几何分解法可以进一步分成区域递归细分法、单元移去方法和子域分离方法。
(1)区域递归细分法(RecursiveSubdivisionMe-thod)由BykatA提出[45,46],他将实体分割成多个凸区域,并在分割线上按网格密度要求插入一组新的节点,分割的最终结果为三角形网格。
(2)单元移去方法(ElementRemovingMethod)是从实体的边界向里一次移去一个单元网格,迭代执行下去,推进波前法就是该方法的成功代表。
推进波前法(AdvancingFrontTechnique,AFT)最初是由Lo[47]提出,AFT方法的基本流程是:首先离散待剖分域的边界,形成首尾相连的线段集合或拓扑相容的三角形面片集合,这种离散后的域边界称为前沿;再从前沿开始,依次插入一个节点,并连接生成一个新的单元,更新前沿,将前沿向待剖分域的内部推进。这种插入节点、生成新单元、更新前沿的过程循环进行,当前沿为空时表明整个域剖分结束。适用于平面域三角网格自动生成。后来Peraire[48]等将这种方法进一步完善推广到二维自适应网格生成,引入背景网格来控制节点的生成。推进波前法对复杂几何形状与边界的二维域(或三维域)中的三角形(或四面体)网格生成灵活、可靠。但这种方法的最大缺点是时间效率相对较低,Bonet[49]和Lohner[50]针对推进波前法存在大量搜索查询操作的特点提出了一些有用的数据结构及算法,大大提高了推进波前法的速度。Talbert[51]还成功利用了一些控制曲线来控制网格生成,在自适应网格生成过程中,这些曲线可以取为一些重要变量的等位线。后来George通过引入控制空间及相邻空间等概念,对推进波前法作一些改进。Johnston[52]等人在算法的改进方面也做出了巨大的贡献。
AFT方法最显著的优点是能够在生成节点的同时生成单元,这样就可以在生成节点时对节点的位置
252
加以控制,从而控制单元形状、尺寸以达到质量控制、局部加密及网格过渡的要求。该方法也存在一定的不足:在生成新单元时需要进行大量的相交判断、包含判断,以及为了保证单元的质量而进行的距离判断,这些判断的计算,约占整个网格划分过程中80%的时耗。
(3)子域分离法是将问题区域一次移去一块,直到剩下最后一块。该方法一般可以分为两类:一类是每次分离出一个单元;另一类是每次分离出一个拓扑简单的子域块,然后利用其它划分算法细化子域块。这种方法一般以层次的形式利用大量的移去操作,并考虑当前的移去操作对以后的移去子块选择的影响。该方法的每一步移去操作所需的计算量很大,所以该算法在生成细化网格方面计算效率并不高,但是可以利用该算法,将整个区域分解为一个个易于网格化的子区域,其总的效率将会大大提高。
3.6扫描法
扫描法是将离散化的基本单元形体进行旋转、扫描、拉伸等操作,获得高维网格的一种方法。这种方法难度较低,容易实现,在当今大多数商用CAD软件和有限元前置处理软件中均有这种功能。但是这种方法只适合于形状简单的三维物体,且主要靠人机交互来实现,自动化程度低。
4研究热点
近年来有限元分析在各种工程领域中得到了广泛的应用,网格划分技术的理论基础已日趋成熟,特别是在二维空间以及三维空间的四面体网格划分方面。近几年有限元网格划分的研究领域已由二维平面问题转移到三维实体,研究重点已经由三角形(四面体)网格转变为四边形(六面体)网格,注重网格的全自动生成、网格自适应等研究,本章主要总结当前网格划分领域的研究热点。
4.1六面体网格划分
尽管四面体网格划分技术已经非常成熟,并已广泛应用于有限元分析软件,但六面体网格的研究依然是学者们的研究热点。这主要是因为六面体具有四面体无法比拟的优点和更高的计算精度。
当前,六面体单元网格生成算法主要有映射单元法、单元转换法、基于栅格法、扩展的推进波前法、多子区域法、扫描法和投影法等。
映射单元法先把三维实体分成几个大的20节点六面体区,然后使用形函数映射技术把各个六面体区域映射为很多细小的8节点六面体单元[53]。这种方法易于实现,可以生成规整的结构化网格;但对于复杂结构,精度不高,且人机交互频繁,难以实现自动化。
单元转换法是通过其他单元转化为六面体单元。目前在三维网格的研究中,四面体网格自动生成的算法已经相当成熟,所以可以通过把四节点四面体单元分成四个六面体单元[54],这样可以把四面体网格自动地转化为六面体网格。但这种方法的边界拟合能力弱,生成的网格质量较差。左旭等[55]对单元转换法进行了改进,将十节点曲边四面体转换为六面体,并采用非线性约束优化算法大幅度提高了六面体网格的单元质量。
基于栅格法首先产生六面体网格模板,将其覆盖到需要网格化的三维实体上。这种方法能实现网格生成的自动化,网格的生成速度也非常快。其最大弱点是边界单元的质量较差,网格密度很难控制。该方法已经成功地运用于有限元分析软件,如MARC等。
AFT方法的扩展主要有编须算法(WhiskerWeav-ing)[56]和粘贴算法(Plastering)[57]。粘贴算法实际上是二维四边形网格逐层推进生成法[58](PavingAlgorithm)在三维空间上的拓展,基于局部几何测试来推进网格,它始终维护网格前沿,即用来描述已剖分区域边界的四边形面片集。剖分器迭代地从网格前沿中选择一个或多个四边形,粘贴上相应的六面体并更新前沿,直到整个区域被剖分,如图4所示。但这种方法可能会留下一些孔洞,这些未被剖分的区域只能用四面体填充。
编须算法基于空间缠绕连续集[59]概念,将AFT方法扩展到三维空间。空间缠绕连续集是在三个方向平分六面体单元的相互交叉表面的组合,是六面体网格的一种对偶表达形式。编须算法首先生成的并不是
古成中等:有限元网格划分及发展趋势253
JournalofFrontiersofComputerScienceandTechnology计算机科学与探索2008,2(3)
六面体网格,而是空间缠绕连续集。得到完整的空间缠绕连续集后,就可以将六面体单元安装到三维实体。编须算法生成的六面体网格质量是所有算法中最好的,但它的程序实现非常困难。
多子区域法分为三个主要步骤:首先将复杂目标域分解为一定数量的简单子区域,然后对每个子区域进行六面体网格划分,最后将各个子区域的网格组合成全局网格,从而形成目标域的整体网格。中轴面法[60]就是多子区域法的典型代表,该方法已经运用于多种有限元分析软件。
扫描法是由二维四边形有限元网格通过旋转、扫描、拉伸等操作而形成六面体网格的一种方法。这种方法难度较低、较容易实现,在当今几乎所有的有限元分析软件中均有这种功能。但是,这种方法只能适用于形状简单的三维物体,且主要依靠人机交互来实现,自动化程度低。图5是综合利用多子区域法和扫描法所得到的六面体网格模型。
投影法是利用良好的四面体网格(通常选择正方体或长方体网格)作为投影网格,即模板网格,通过模板网格节点与待分实体表面关键点的对应关系控制投影的路径与比例缩放情况,如图6所示。
投影法已经成功地运用于某些有限元前处理系统,例如专门针对六面体网格划分的TrueGrid软件。使用TrueGrid时首先将复杂实体分割成相对简单的区域,建立合理的投影模板,通过网格投影即能得到效果非常优越的六面体网格。但该方法需要较多的人机交互,自动化较低。图7为利用TrueGrid所建立的六面体网格,从图中可以看出运用投影法所得到的有限元模型质量非常高,而且该方法适用于任何复杂模型。
4.2曲面网格划分
工程结构中常用的薄壳结构,如飞机蒙皮、汽车外壳等,都是由自由曲面组合而成的。三维曲面是三维实体的退化,是一种特殊形式,三维曲面的有限元网格划分的应用范围很广。目前的曲面网格生成方法可粗略地分为直接法和映射法两种。
直接法的曲面网格划分是直接在曲面的物理空间进行,网格划分过程直接以曲面的局部几何形态为参考,并根据曲面的局部状况采取不同的剖分策略。直接法的研究起步较晚,目前主要有两个分支:曲面分解法[61]和基于AFT的直接法[62]。曲面分解法是基于四叉树理论,其基本思想是:将曲面递归分解成较小的面片,
直到这些小面片在给定的逼近误差下可精确254
模拟原始曲面为止,然后再将小面片转换为单元网格,最终形成对原始曲面的单元划分。这种方法最大的优点就是具有曲面自适应能力,对复杂曲面的逼近程度较好。但执行速度较慢,缺乏网格的局部控制能力。其生成的网格能较好地逼近原始曲面,而且网格的质量也较高。基于AFT的直接法引入了新的判别算子,扩充了控制前沿网格生成的约束条件,使用投影算法保证插入节点在曲面上的精确定位。基于AFT的直接法具有灵活、可靠、简单等特点,可同时使用曲面曲率和密度函数控制网格,它不仅表现出良好的曲面适应能力,还具有网格的局部加密能力。
映射法首先将曲面边界映射到二维参数空间,在二维参数空间中进行网格划分,然后将划分结果反向映射到物理空间形成曲面网格,如图8所示。映射法具有实现简单、执行效率高、网格疏密度的可控性强、可局部加密和可重划分等优点。但参数空间上单元形状良好的网格映射到物理空间后可能会出现畸变。
为了减少网格的畸变,增强映射法的曲面适应能力,许多学者对该方法进行了改进。Zheng等[63]在曲面的参数空间中引入了延展因子概念消除或减弱由映射函数引起的畸变,但该方法不适用于内部与边界的畸变状态差别较大的曲面。Chen等[64]用外接椭圆准则替代Delaunay三角化方法中的外接圆准则,保证了参数空间的Delaunay划分结果在反向映射到物理空间后具有良好的几何形态。Chen方法对曲面边界和内部的映射畸变给出了统一的计算方法,克服了延展因子的缺陷。熊英等[65]在Chen的基础上提出了新的椭圆构造算法以及椭圆圆心的定位方法,并解决了求解椭圆效率不高的问题。Cuilliere[66]建立了一套曲面相关性的数学方程,用来描述由映射引发的畸变。
目前对于三维曲面网格方面的研究主要针对单张非闭合曲面进行,对于闭合曲面和组合曲面的研究则十分有限。针对这个问题,关振群[67]通过引入虚边界,解决了闭合曲面经由映射所形成平面域边界不完整的问题,使映射法可以在闭合曲面的剖分中直接使用;通过调节虚边界在物理空间的位置,提高了网格的质量;改进了曲面网格剖分布点算法,并结合局部连接、诊断交换等技术,提高了组合曲面网格的整体质量;着重研究了带有闭合曲面的复杂三维组合曲面的有限元网格生成方法。
5展望
目前有限元网格生成技术已经相当成熟,可以实现三维领域的网格划分全自动,但在网格划分方面依然有很大的研究空间。有限元网格划分还有许多难题没有得到彻底解决,网格划分的效率、单元质量等还有待进一步提高。分析当前有限元网格划分技术,可以总结出有限元建模的发展趋势:
(1)集成CAD建模系统与CAE软件,实现有限元建模的参数化。以参数化CAD系统为平台,将参数化设计运用到网格划分,以设计参数来控制有限元网格,实现CAD建模系统的几何信息和非几何信息特征向有限元模型的自动转换。
(2)多种通用算法的结合使用。前面已经分析了各种算法的适用范围与优缺点,它们都各有千秋,如何实现多种算法的综合运用、扬长避短,一直是近年的研究热点。
(3)网格划分的全自动化。目前网格划分的全自动化已经应用于三维领域,但全自动生成的有限元网格在计算效率、网格质量等方面都存在不足。特别是六面体网格的全自动生成,目前基本没有有限元软件可以自动对复杂区域进行六面体网格划分,网格的自适应性就更难解决了。
(4)网格化分的自适应性。在工程分析中自适应网格可以通过有限元计算结果后的误差分析,重新优化有限元网格。自适应网格生成对于提高有限元分析
古成中等:
有限元网格划分及发展趋势255
JournalofFrontiersofComputerScienceandTechnology计算机科学与探索2008,2(3)
的精度是非常有效的,随着有限元研究与应用领域的不断扩展,自适应网格生成算法也会不断发展。
(5)人工智能和专家系统的应用。有限元网格划分非常依赖经验,采用专家系统实行知识推理机制和人工智能将会大大提高有限元自动建模的效率和模型的正确性。
References:
[1]TangRongxi.ThetechnologyofCAD/CAM[M].Beijing:BeijingUniversityofAeronauticsandAstronauticsPress,1994.
[2]RaphaelB,KrishanmoorthyCS.Automatingfiniteelementdevelopmentusingobjectorientedtechniques[J].EngCom-putation,1993,10:267-278.
[3]ThackerWC.Abriefreviewofmethodsusedforgener-atingirregularcomputationalgrids[J].InternationalJournalforNumericalMethodsinEngineering,1980,15:1335-1341.[4]Ho-LeK.Finiteelementmeshgenerationmethods:are-viewandclassification[J].ComputerAidedDesign,1988,20(1):27-38.
[5]ShephardMS.Approachestotheautomaticgenerationandcontroloffiniteelementmeshes[J].AppliedMechan-icsReview,1988,41(4):169-185.
[6]ShephardMS,GriceKR,LoJA,etal.Trendsinau-tomaticthree-dimensionalmeshgeneration[J].Computer&Structures,1988,30(1/2):421-429.
[7]BakerTJ.Developmentsandtrendsinthree-dimensionalmeshgeneration[J].AppliedNumericalMathematics,1989,5(4):275-304.
[8]GeorgePL.Automaticmeshgeneration,applicationstoFiniteElementMethods[M].NewYork:Willey,1991.[9]HuEQ,ZhangXF,XiangW,etal.Areviewofmeshgenerationmethodsforfiniteelementcomputation[J].JournalofComputer-AidedDesign&ComputerGraphics,1997,9(4):378-383.
[10]GuanZQ,SongC.Recentadvancesofresearchonfi-niteelementmeshgenerationmethod[J].JournalofCom-puter-AidedDesign&ComputerGraphics,2003,15(1):1-14.[11]WangMQ,ZhuYM,LiuWX,etal.Theresearchonfiniteelementmeshgenerationmethod[J].MachineryDesign&Manufacture,2004,1:22-24.
[12]HuangZC,BaoZY,ZhouTR,etal.Theresearchoffiniteelementmeshgeneration[J].JournalofNanchangUniversity:Engineering&Technology,2001,23(4):25-31.
[13]LvJ,WangZJ,WangZR,etal.Generationoffiniteelementhexahedralmeshanditstrendofdevelopment[J].JournalofHarbinInstituteofTechnology,2001,33(4):485-490.
[14]WeiHN,ZhouBK.Ontheselectionofproperauto-maticmeshgeneratorsforadaptivefiniteelementanaly-sis[J].JournalofSouthwestJiaotongUniversity,1997,32(5):477-482.
[15]ZhangYF,ZhuYW.Reviewfortypicalmethodsoffiniteelementmeshautomaticgenerationandresearchtopicsinfuture[J].JournalofWuhanUniversity:Engi-
neering,2005,38(2):54-59.
[16]LiY,ZhaoW.Newmethodforautomaticalmeshgener-ationandoptimizationinFEA[J].JournalofSichuanUni-versityofScienceandTechnology,2003,22(3):104-106.[17]LiXL,ZhaoW.Researchprogressinmeshgenerationhexahedralfiniteelement[J].JournalofDalianNationali-tiesUniversity,2003,5(3):1-2.
[18]YuHT,ShaoKR.AdaptivemeshgenerationforFEMcomputation[J].HighVoltageEngineering,2004,30(5):4-5.[19]LiSJ,HeYH.Theregionalmeshingmethodbasedonconstraintequation[J].JournalofHuaqiaoUniversity:NaturalScience,2006,27(2):170-173.
[20]BlackerT.Automatedconformalhexahedralmeshingcon-straints,challengesandopportunities[J].EngineeringwithComputers,2001,17(3):201-210.
[21]BrownPR.Anon-interactivemethodfortheautomaticgenerationoffiniteelementmeshesusingtheSchwarz-Christoffeltransformation[J].ComputerMethodsinAppliedMechanicsandEngineering,1981,25(1):101-126.
[22]BaldwinKH,SchreyerHL.Automaticgenerationofquadrilateralelementsbyaconformalmapping[J].Engi-neeringwithComputers,1985,2(3):187-194.
256
[23]YangGW,EQ,LiFW.Useofconformalmappingingridgenerationforcomplextwo-andthree-dimensionalconfigurations[J].ACTAAerodynamicSINICA,1997,15(3):378-385.
[24]ThompsonJF,ThamesFC,MartinCW.Automaticnumericalgenerationofbody-fittedcurvilinearcoordinatessystemforfieldcontainninganynumberofarbitrarytwo-dimensionalbodies[J].JournalofComputationalPhy-sics,1974,15:299-319.
[25]ThompsonJF,WarsiZUA,MastinCW.Boundary-fittedcoordinatesystemsfornumericalsolutionofpartialdifferentialequations—areview[J].JournalofComputationalPhysics,1982,47:1-108.
[26]ThompsonJF,WarsiZUA,MastinCW.Numericalgridgeneration:foundationsandapplications[M].NewYork:Elsevier,1985.
[27]ThompsonJF.Acompositegridgenerationcodeforgeneral3Dregions—theEAGLEcode[J].AIAAJournal,1988,26(3):271-272.
[28]HsuK,LeeSL.Anumericaltechniquefortwo-dimen-sionalgridgenerationwithgridcontrolatalloftheboundaries[J].JournalofComputationalPhysics,1991,96(2):451-469.
[29]SpekreijseSP.EllipticgridgenerationbasedonLaplaceequationsandalgebraictransformations[J].JournalofCom-putationalPhysics,1995,118(1):38-61.
[30]GordonWJ,HallCA.Constructionofcurvilinearcoor-dinatesystemsandapplicationstomeshgeneration[J].InternationalJournalforNumericalMethodsinEngineer-ing,1973,7:461-477.
[31]ErikssonLE.Generationofboundaryconforminggridsaroundwing-bodyconfigurationsusingtransfiniteinterpo-lation[J].AIAAJournal,1982,20(10):1313-1320.
[32]YangWJ,BaoZX,FuMF,etal.Mappingappliedforhexahedralmeshgeneration[J].JournalofNanchangUniversity:Engineering&Technology,1999,21(4):39-43.[33]KadivarMH,SharifiH.Doublemappingofisopara-metricmeshgeneration[J].Computer&Structure,1996,59(3):471-477.
[34]ThackerWC.Amethodforautomatingtheconstruction
ofirregularcomputationalgridsforstormsurgeforecastmodels[J].JournalofComputationalPhysics,1980,37:371-387.
[35]YerryMA,ShephardMS.Amodifiedquadtreeap-proachtofiniteelementmeshgeneration[J].IEEECom-puterGraphics&Applications,1983,3(1):39-46.
[36]ShpitalniM.Finiteelementmeshgenerationvisawitch-ingfunctionrepresentation[J].FiniteElementinAnalysisandDesign,1989,5(2):119-130.
[37]CavendishJC.Automatictriangulationofarbitraryplanardomainsforthefiniteelementmethod[J].InternationalJournalforNumericalMethodsinEngineering,1974,8:679-696.
[38]ShawRD,PitchenRG.ModificationstotheSuhara-Fukudamethodofnetworkgeneration[J].InternationalJournalforNumericalMethodsinEngineering,1978,12:93-99.
[39]LoSH.Anewmeshgenerationschemeforarbitraryplanardomains[J].InternationalJournalforNumericalMethodsinEngineering,1985,21:1403-1426.
[40]GeorgePL,HechtF,SaltelE.Automaticmeshgener-atorwithspecifiedboundary[J].ComputerMethodsinAppliedMechanicsandEngineering,1991,92(3):269-288.[41]GeorgePL,BorouchakiH.Delaunaytriangulationandmeshing:applicationtofiniteelements[M].Paris:Edi-tionsHERMES,1998.
[42]WeatherillNP,HassanO.Efficientthree-dimensionalDelaunaytriangulationwithautomaticpointcreationandimposedboundaryconstrains[J].InternationalJournalforNumericalMethodsinEngineering,1994,37(12):2005-2039.[43]JoeB.GEOMPACK—asoftwarepackageforthegenera-tionofmeshesusinggeometricalgorithms[J].AdvancesinEngineeringSoftware,1991,56(13):325-331.
[44]WordenweberB.Finiteelementmeshgeneration[J].CAD,1984,16(5):285-291.
[45]BykatA.Automaticgenerationoftriangulargrid:Ⅰ—subdivisionofageneralpolygonintoconvexsub-regions,
Ⅱ—triangulationofconvexpolygons[J].IntJNumerMethEng,1976,10:1329-1342.
[46]BykatA.Designofarecursiveshapecontrollingmesh
古成中等:有限元网格划分及发展趋势257
JournalofFrontiersofComputerScienceandTechnology计算机科学与探索2008,2(3)
generator[J].IntJNumerMethEng,1983,19:1375-1390.[47]LoSH.Volumediscretizationintotetrahedral—II,3Dtriangulationbyadvancingfrontapproach[J].ComputersandStructures,1991,39(5):501-511.
[48]PeraireR.FiniteelementEulercomputationsinthree-di-mensions[J].IntJournalNumMethEng,1998,26(10):2135-2159.
[49]BonetJ,PeraireJ.Analternatingdigitaltree(ADT)algo-rithmforgeometricsearchingandintersectionproblems[J].InternationalJournalforNumericalMethodsinEngineer-ing,1991,31(1):1-17.
[50]LohnerR.Someusefuldatastructuresforthegenerationofunstructuredgrids[J].CommunicationsinAppliedNu-mericalMethods,1988,4(1):123-135.
[51]TalbertJA,ParkinsonAR.Developmentofanauto-matictwo-dimensionalfiniteelementmeshgeneratorus-ingquadrilateralelementsandBeziercurveboundarydefinition[J].IntJNumMethEng,1990,29(7):1551-1567.
[52]JohnstonBP,SullivanJM.Fullyautomatictwo-di-mensionalmeshgenerationusingnormaloffsetting[J].IntJournalNumMethEng,1992,33(2):425-442.
[53]CookWA,OakesWR.Mappingmethodsforgenerat-ingthree-dimensionalmeshes[J].ComputinMechEng,1982,8:67-72.
[54]XieG,RamaekerJAH.Gradedmeshgenerationandtransformation[J].FiniteElementsinAnalysisandDesign,1994,17:41-55.
[55]ZuoX,WeiYP.Anelementtransformationandoptimi-zationmethodin3Dautomatichexahedralmeshgenera-tion[J].ChineseJournalofComputationalMechanics,1999,16(3):343-348.
[56]TautgesTJ,BlackerT,MitchellS.Thewhisker-weav-ingalgorithm:aconnectivitybasedmethodforcon-structingall-hexahedralfiniteelementmeshes[J].Interna-tionalJournalforNumericalMethodsinEngineering,1996,39(19):3327-3349.
[57]BlackerTD,MeyersRJ.Seamsandwedgesinplas-tering:a3Dhexahedralmeshgenerationalgorithm[J].EngineeringwithComputers,1993,9(2):83-93.[58]BlackerTD,StephensonMB.Paving:anewapproachtoautomatedquadrilateralmeshgeneration[J].IntJNumMethodsEng,1991,32:811-847.
[59]MurdochP,BenzleySE.Thespatialtwistcontinuum[C]//Proceedingsofthe4thInternationalMeshingRoundtable,Albuquerque,1995:243-251.
[60]LiTS,MckeagRM,ArmstrongCG.Hexahedralmesh-ingusingmidpointsubdivisionandintegerprogramming[J].ComputMethodsApplMechEng,1995,124:177-193.[61]MeiZY,FanYQ.FiniteelementmeshgenerationofNURBSsurface[J].JournalofComputer-AidedDesign&ComputerGraphics,1997,9(4):289-294.
[62]LauTS,LoSH.Finiteelementmeshgenerationoveranalyticalcurvedsurfaces[J].Computer&Structures,1994,59(2):301-309.
[63]ZhengY,LewisRW,GethinDT.Three-dimensionalunstructuredmeshgeneration:PartII,surfacemesh[J].ComputerMethodsinAppliedMechanicsandEngineer-ing,1996,134(3/4):269-284.
[64]ChenH,BishopJ.Delaunaytriangulationforcurvedsurface[C]//Proceedingsofthe6thInternationalMeshingRoundtable,ParkCity,USA,1997:115-127.
[65]XiongY,HuYJ.AnalgorithmofsurfacetriangulationbasedonmappingmethodandDelaunaytriangulation[J].JournalofComputer-AidedDesign&ComputerGraph-ics,2002,14(1):56-60.
[66]CuilliereJC.Anadaptivemethodfortheautomatictri-angulationof3Dparametricsurface[J].ComputerAideddesign,1998,30(2):139-149.
[67]GuanZQ,SuiXF.Automaticfiniteelementmeshgenerationover3Dcombinedsurfaces[J].ChineseJour-nalofComputationalMechanics,2003,20(4):409-416.
附中文参考文献:
[1]唐荣锡.CAD/CAM技术[M].北京:北京航空航天大学出版社,1994.
[9]胡恩球,张新访,向文,等.有限元网格生成方法发展综述[J].计算机辅助设计与图形学学报,1997,9(4):378-383.
[10]关振群,宋超.有限元网格生成方法研究的新进展[J].计算机辅助设计与图形学学报,2003,15(1):1-14.
258
GUChengzhongwasbornin1981.HeisaPh.D.candidateatNavalUniversityofEngineering.HeisalectureratNavalUniversityofEngineering.HisresearchinterestsincludeCAD&CAE,etc.Hehaspub-lished4papersininternationalanddomesticpublications.
古成中(1981-),男,安徽省无为县人,博士研究生,海军工程大学船舶与动力学院机械设计教研室,主要研究方向:CAD/CAE技术研究,发表学术论文4篇。
WUXinyuewasbornin1962.HereceivedthePh.D.degreeinTurbineEngineeringfromNavalUniversityofEngineeringin1999.HeisaprofessoranddoctoralsupervisoratNavalUniversityofEngineering.HisresearchinterestsincludeCAD,CAEanddynamicanalysisofmechanismstructure,etc.Hehaspublishedmorethan50papersininternationalanddomesticpublications.HehasacquiredsecondandthirdprizesinAdvancementofMilitaryScienceandTechnology.
吴新跃(1962-),男,浙江省松阳人,1999年于海军工程大学获博士学位,现任海军工程大学教授、博士生导师,主要研究方向:CAD/CAE技术研究、机械结构动态分析等,发表学术论文50余篇(国际4篇,国内核心刊物40余篇),获军队科技进步二等奖2项、军队科技进步三等奖3项。
[11]王明强,朱永梅,刘文欣,等.有限元网格划分方法应用研
究[J].机械设计与制造,2004,1:22-24.
[12]黄志超,包忠诩,周天瑞,等.有限元网格划分技术研究[J].
南昌大学学报,2001,23(4):25-31.
[13]吕军,王忠金,王仲仁,等.有限元六面体网格的典型生成
方法及发展趋势[J].哈尔滨工业大学学报,2001,33(4):
485-490.
[14]魏红宁,周本宽.自适应有限元分析的网格自动生成方法
的选择[J].西南交通大学学报,1997,32(5):477-482.
[15]张玉峰,朱以文.有限元网格自动生成的典型方法与研究
前瞻[J].武汉大学学报:工学版,2005,38(2):54-59.
[16]李娅,赵文.有限元网格自动剖分及优化方法[J].四川工业
学院学报,2003,22(3):104-106.
[17]李笑牛,赵伟.六面体有限元网格生成方法综述[J].大连民
族学院学报,2003,5(3):1-2.
[18]余海涛,邵可然.有限元网格自动剖分[J].高电压技术,
2004,30
(5):4-5.[19]李士军,郝艳华.约束方程的分区网格划分法[J].华侨大学
学报:自然科学版,2006,27(2):170-173.
[23]杨国伟,鄂秦,李凤蔚.保角变换在复杂外形网格生成中的
应用[J].空气动力学学报,1997,15(3):378-385.
[32]杨伟军,包忠诩,扶名福,等.映射法在三维六面体有限元
网格生成中的应用[J].南昌大学学报,1999,21(4):39-43.
[55]左旭,卫原平.三维六面体有限元网格自动划分中的一种
单元转换优化算法[J].计算力学学报,1999,16(3):343-348.
[61]梅中义,范玉青.NURBS曲面的有限元网格三角剖分[J].计
算机辅助设计与图形学学报,1997,9(4):289-294.
[65]熊英,胡于进.基于映射法和Delaunay方法的曲面三角网
格划分算法[J].计算机辅助设计与图形学学报,2002,14(1):
56-60.
[67]关振群,隋晓峰.复杂三维组合曲面的有限元网格生成方
法[J].计算力学学报,2003,20(4):409-416.
古成中等:
有限元网格划分及发展趋势
259
有限元填空选择题及答案
1有限元是近似求解_一般连续_场问题的数值方法 2有限元法将连续的求解域离散为若干个子域_,得到有限个单元,单元和单元之间用节点相连 3从选择未知量的角度来看,有限元法分为三类位移法. 力法混合法 4以_节点位移_为基本未知量的求解方法称为位移法. 5以_节点力_为基本未知量的求解方法称为力法. 6一部分以__节点位移__,另一部分以_节点力_为基本未知量的求解方法称为混合法. 7直梁在外力的作用下,横截面的内力有剪力_和_弯矩_两个. 8平面刚架结构在外力的作用下,横截面上的内力有轴力_ 、剪力_和弯矩. 9进行直梁有限元分析,平面刚架单元上每个节点的节点位移为挠度和转角 10平面刚架结构中,已知单元e的坐标变换矩阵[T e ]和在局 部坐标系x’O’y’下的单元刚度矩阵[K’]e ,则单元在真体坐标 系xOy下的单元刚度矩阵为_ [K]e = [T e ] T [K’] e [T e ] 13弹性力学问题的方程个数有15个,未知量的个数有15个. 14弹性力学平面问题的方程个数有8_个,未知量个数有8_个15几何方程是研究__应变___和_位移之间关系的方程 16物理方程是描述_应力_和_应变_关系的方程 17平衡方程反映了_应力__和_位移_之间关系的 18把经过物体内任意一点各个_ 截面上的应力状况叫做__该点_的应力状态 19形函数在单元上节点上的值,具有本点为_1_.它点为零的性质,并且在三角形单元的任一节点上,三个行函数之和为_1_ 20 形函数是_三角形_单元内部坐标的_线性位移_函数,他反映了单元的_位移_状态 21在进行节点编号时,要尽量使用同一单元的相邻节点的狭长的带状尽可能小,以使最大限度地缩小刚度矩阵的带宽,节省存储,提高计算效率. 22三角形单元的位移模式为_线性位移模式_- 23矩形单元的位移模式为__线性位移模式_ 24在选择多项式位移模式的阶次时,要求_所选的位移模式应该与局部坐标系的方位无关的性质为几何_各向同性 25单元刚度矩阵描述了_节点力_和_节点位移之间的关系 26在选择多项式作为单元的位移模式时,多项式阶次的确定,要考虑解答的收敛性,即要满足单元的_完备性和协调性要求27三节点三角形单元内的应力和应变是_常数,四节点矩形单元内的应力和应变是线性_变化的 28在矩形单元的边界上,位移是线性_变化的 29整体刚度是一个呈_ 狭长的带状_分布的稀疏矩阵 30整体刚度[K]是一个奇异阵,在排除刚体位移_后,它正义阵1从选择未知量的角度来看,有限元法可分为三类(力法,位移法,混合法) 2下列哪有限元特点的描述中,哪种说法是错误的(D需要使用于整个结构的插值函数) 3几何方程研究的是(A应变和位移)之间关系的方程式 4物理方程是描述(D应力和应变)关系的方程 5平衡方程研究的是(C应力和位移)之间关系的方程式 6在划分单元时,下列哪种说话是错误的(A一般首选矩形单元) 7下列哪种单元的单元刚度矩阵必须通过积分才能得到(D矩形单元) 8单元的刚度矩阵不取决于下列哪种因素(B单元位置) 9可以证明,在给定载荷的作用下,有限元计算模型的变形与实际结构变形之间的关系为(B前者小于后者) 10ANSYS按功能作用可分为若干个处理器,其中(B求解器)用于施加载荷和边界条件 11下列有关有限元分析法的描述中,哪种说话是错误的(B单元之间通过其边界连接成组合体) 12下列关于等参数单元的描述中,哪些说话是错误的(C将规则单元变换为不规则单元后,易于构造位移模式) 13从选择未知量的角度来看,有限元可以分为三类,混合法的未知量是(C节点力和节点位移) 14下列对有限元特点的描述中,哪种说话是错误的(B对有限元求解域问题没有较好的处理方法) 15在划分单元时,下列哪种说话错误(D自由端不能取为节点) 16对于平面问题,选择单元一般首选(D三角形单元或等参单元) 17下列哪种说法不是形函数的性质(C三角形单元任一条边上的形函数,与三角形的三个节点坐标都有关) 18下列四种假设中,哪种分析不属于分析弹性力学的基本假设(C大变形假设) 19下列四种假设中,哪种不属于分析弹性力学的基本假设(B 有限变形假设) 20下列关于三角形单元说法中哪种是错误的(C在单元的公共边上应力和应变的值是连续的) 21下列关于矩形单元的说法哪项是错误的(D其形函数是线形的) 22应用圣维南原理简化边界条件时,静力等效是指前后的力系的(D主矢量相同,对于同一点的主矩也相同) 24描述同一点的应力状态需要的应力分量是(C6个) 25在选择多项式作为单元的位移模式时.多项式阶次的确定,要考虑解答的收敛性,哪种说法不是单元必须满足的要求(D 对称性)
有限元网格划分的基本原则
有限元网格划分的基本原则 划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。为建立正确、合理的有限元模型,这里介绍划分网格时应考虑的一些基本原则。 1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。 图1 位移精度和计算时间随网格数量的变化 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2 网格疏密 网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。图2是中心带圆孔方板的四分之一模型,其网格反映了疏密不同的划分原则。小圆孔附近存在应力集中,采用了比较密的网格。板的四周应力梯度较小,网格分得较稀。其中图b中网格疏密相差更大,它比图a中的网格少48个,但计算出的孔缘最大应力相差1%,而计算时间却减小了36%。由此可见,采用疏密不同的网格划分,既可以保持相当的计算精度,又可使网格数量减
华科大有限元分析题及大作业题答案——船海专业(DOC)
姓名:学号:班级:
有限元分析及应用作业报告 一、问题描述 图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较: 1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算; 2)分别采用不同数量的三节点常应变单元计算; 3)当选常应变三角单元时,分别采用不同划分方案计算。
二、几何建模与分析 图1-2力学模型 由于大坝长度>>横截面尺寸,且横截面沿长度方向保持不变,因此可将大坝看作无限长的实体模型,满足平面应变问题的几何条件;对截面进行受力分析,作用于大坝上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力,满足平面应变问题的载荷条件。因此该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况及方向如图1-2所示,建立几何模型,进行求解。 假设大坝的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3 三、第1问的有限元建模 本题将分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算。 1)设置计算类型:两者因几何条件和载荷条件均满足平面应变问题,故均取Preferences为Structural 2)选择单元类型:三节点常应变单元选择的类型是PLANE42(Quad 4node42),该单元属于是四节点单元类型,在网格划分时可以对节点数目控制使其蜕化为三节点单元;六节点三角形单元选择的类型是PLANE183(Quad 8node183),该单元属于是八节点单元类型,在网格划分时可以对节点数目控制使其蜕化为六节点单元。因研究的问题为平面应变问题,故对Element behavior(K3)设置为plane strain。 3)定义材料参数 4)生成几何模 a. 生成特征点 b.生成坝体截面 5)网格化分:划分网格时,拾取所有线段设定input NDIV 为10,选择网格划分方式为Tri+Mapped,最后得到200个单元。 6)模型施加约束: 约束采用的是对底面BC全约束。 大坝所受载荷形式为Pressure,作用在AB面上,分析时施加在L AB上,方向水平向右,载荷大小沿L AB由小到大均匀分布(见图1-2)。以B为坐标原点,BA方向为纵轴y,则沿着y方向的受力大小可表示为: ρ(1) = gh P- =ρ g = - 10 {* } 98000 98000 (Y ) y
在ANSYS平台上的复杂有限元网格划分技术
在ANSYS平台上的复杂有限元网格划分技术 1. 网格密度 有限元结构网格数量的多少将直接影响计算结果的精度和计算规模的大小。一般来说,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,怎样在这两者之间找到平衡,是每一个CAE工作者都想拥有的技术。网格较少时,增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高很少,而计算时间却大幅度增加。所以应该注意网格数量的经济性。实际应用时,可以比较两种网格划分的计算结果,如果两次计算结果相差较大,应该继续增加网格,重新计算,直到结果误差在允许的范围之内。 在决定网格数量时还应该考虑分析类型。静力分析时,如果仅仅是计算结构的变形,网格数量可以少一点。如果需要计算应力,则在精度要求相同的情况下取相对较多的网格。同样在结构响应计算中,计算应力响应所取的网格数量应该比计算位移响应的多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选取较少的网格,如果计算的阶数较高,则网格数量应该相应的增加。在热分析中,结构内部的温度梯度不大时,不需要大量的内部单元,否则,内部单元应该较多。 有限元分析原则是把结构分解成离散的单元,然后组合这些单元
解得到最终的结果。其结果的精度取决于单元的尺寸和分布,粗的网格往往其结果偏小,甚至结果会发生错误。所以必须保证单元相对足够小,考虑到模型的更多的细节,使得到的结果越接近真实结果。由于粗的网格得到的结果是非保守的,因此要认真查看结果,其中有几种方法可以帮助读者分析计算结果与真实结果之间的接近程度。 最常用的方法是用对结果判断的经验来估计网格的质量,以确定网格是否合理,如通过看云图是否与物理现象相一致,如果云图线沿单元的边界或与实际现象不一致,那么很有可能结果是不正确的。 更多的评价网格误差的方法是通过比较平均的节点结果和不平均的单元结果。如在ANSYS中,提供了两条显示结果的命令:PLNS,PLES。前者是显示平均的节点结果,后者是显示不平均的单元结果。PLNS命令是计算节点结果,它是通过对该节点周围单元结果平均后得到的,分析结果是基于单元高斯积分点值,然后外插得到每个节点,因此在给定节点周围的每个单元都由自己的单元计算得到,所以这些节点结果通常是不相同的。PLNS命令是在显示结果之前将每个节点的所有结果进行了平均,所以看到的云图是以连续的方式从一个单元过渡到另外一个单元。而PLES命令不是对节点结果平均,所以在显示云图时单元和单元之间是不连续的。这种不连续程度在网格足够密(即单元足够小)的时候会很小或不存在,而在网格较粗时很大。由于PLNS结果是一个平均值,所以它得到的结果会比PLES的结果小,他
有限元法课后习题答案
1、有限元是近似求解一般连续场问题的数值方法 2、有限元法将连续的求解域离散为若干个子域,得到有限个单元,单元和单元之间用节点连接 3、直梁在外力的作用下,横截面的内力有剪力和弯矩两个. 4、平面刚架结构在外力的作用下,横截面上的内力有轴力、剪力、弯矩. 5、进行直梁有限元分析,平面刚架单元上每个节点的节点位移为挠度和转角 6、平面刚架有限元分析,节点位移有轴向位移、横向位移、转角。 7、在弹性和小变形下,节点力和节点位移关系是线性关系。 8、弹性力学问题的方程个数有15个,未知量个数有15个。 9、弹性力学平面问题方程个数有8,未知数8个。 10、几何方程是研究应变和位移之间关系的方程 11、物理方程是描述应力和应变关系的方程 12、平衡方程反映了应力和体力之间关系的 13、把经过物体内任意一点各个截面上的应力状况叫做一点的应力状态 14、9形函数在单元上节点上的值,具有本点为_1_.它点为零的性质,并且在三角形单元的任一节点上,三个行函数之和为_1_ 15、形函数是_三角形_单元内部坐标的_线性_函数,他反映了单元的_位移_状态 16、在进行节点编号时,同一单元的相邻节点的号码差尽量小. 17、三角形单元的位移模式为_线性位移模式_- 18、矩形单元的位移模式为__双线性位移模式_
19、在选择多项式位移模式的阶次时,要求_所选的位移模式应该与局部坐标系的方位无关的性质为几何_各向同性 20、单元刚度矩阵描述了_节点力_和_节点位移之间的关系 21、矩形单元边界上位移是连续变化的 1.诉述有限元法的定义 答: 有限元法是近似求解一般连续场问题的数值方法 2.有限元法的基本思想是什么 答: 首先,将表示结构的连续离散为若干个子域,单元之间通过其边界上的节点连接成组合体。其次,用每个单元内所假设的近似函数分片地表示求解域内待求的未知厂变量。 3.有限元法的分类和基本步骤有哪些 答: 分类: 位移法、力法、混合法;步骤: 结构的离散化,单元分析,单元集成,引入约束条件,求解线性方程组,得出节点位移。 4.有限元法有哪些优缺点 答: 优点:
ANSYS有限元网格划分的基本原则
ANSYS有限元网格划分的基本原则 引言 ANSYS中有两种建立有限元模型的方法:实体建模和直接生成。使用实体建模,首先生成能描述模型的几何形状的几何模型,然后由ANSYS程序按照指定的单元大小和形状对几何体进行网格划分产生节点和单元。对于直接生成法,需要手工定义每个节点的位置和单元的连接关系。 一般来说对于规模较小的问题才适于采用直接生成法,常见的问题都需要先通过实体建模生成几何模型,然后再对其划分网格生成有限元模型。随着计算机性能的提高,分析模型的复杂性和规模都越来越大,而直接生成法也因其自身的局限性逐渐的被淘汰,所以正确的理解划分网格的目的和掌握划分网格的方法不论是对ANSYS的学习还是对二次开发都有重要的作用,尤其是当模型复杂度大,对模型的某些部分网格需要特殊处理时,这种对划分网格深度的理解作用更加明显。 2 常用高级网格划分方法 随着ANSYS功能的越来越强大和计算机性能的飞速提高,有限元分析向着大型化、复杂化的方向发展,而划分网格的观念也需要逐渐从二维模型向三维模型上上转变。这里主要描述三种常见的高级划分网格的方法,正确的理解和掌握这些划分网格的思想对于二次开发者来说非常的重要。 1)延伸网格划分 延伸网格划分是指将一个二维网格延伸生成一个三维网格;三维网格生成后去掉二维网格,延伸网格划分的步骤大体包括:先生成横截面、指定网格密度并对面进行网格划分、拖拉面网格生成体网格、指定单元属性、拖拉、完成体网格划分、释放已选的平面单元。 这里通过一个延伸网格划分的简单例子来加深对这种网格划分的理解。 图1 延伸网格划分举例 建立如图1所示的三维模型并划分网格,我们可以先建立z方向的端面,然后划分网格,通过拖拉的方法在z方向按照图中所示尺寸要求的三维模型,只需
_基于ANSYS的有限元法网格划分浅析
文章编号:1003-0794(2005)01-0038-02 基于ANSYS的有限元法网格划分浅析 杨小兰,刘极峰,陈 旋 (南京工程学院,南京210013) 摘要:为提高有限元数值的计算精度和对复杂结构力学分析的准确性,针对不同分析类型采用了不同的网格划分方法,结合实例阐述了ANSYS有限元网格划分的方法和技巧,指出了采用ANSYS有限元软件在网格划分时应注意的技术问题。 关键词:ANSYS;有限元;网格;计算精度 中图号:O241 82;TP391 7文献标识码:A 1 引言 ANSYS有限元分析程序是著名的C AE供应商美国ANSYS公司的产品,主要用于结构、热、流体和电磁四大物理场独立或耦合分析的CAE应用,功能强大,应用广泛,是一个便于学习和使用的优秀有限元分析程序。在ANSYS得到广泛应用的同时,许多技术人员对ANSYS程序的了解和认识还不够系统全面,在工作和研究中存在许多隐患和障碍,尤为突出的是有限元网格划分技术。本文结合工程实例,就如何合理地进行网格划分作一浅析。 2 网格划分对有限元法求解的影响 有限元法的基本思想是把复杂的形体拆分为若干个形状简单的单元,利用单元节点变量对单元内部变量进行插值来实现对总体结构的分析,将连续体进行离散化即称网格划分,离散而成的有限元集合将替代原来的弹性连续体,所有的计算分析都将在这个模型上进行。因此,网格划分将关系到有限元分析的规模、速度和精度以及计算的成败。实验表明:随着网格数量的增加,计算精确度逐渐提高,计算时间增加不多;但当网格数量增加到一定程度后,再继续增加网格数量,计算精确度提高甚微,而计算时间却大大增加。在进行网格划分时,应注意网格划分的有效性和合理性。 3 网格划分的有效性和合理性 (1)根据分析数据的类型选择合理的网格划分数量 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格。如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,可划分较少的网格。 (2)根据分析数据的分布特点选择合理的网格疏密度 在决定网格疏密度时应考虑计算数据的分布特点,在计算固有特性时,因为固有频率和振型主要取决于结构质量分布和刚度分布,采用均匀网格可使结构刚度矩阵和质量矩阵的元素不致相差很大,可减小数值计算误差。同样,在结构温度场计算中也趋于采用均匀的网格形式。在计算数据变化梯度较大的部位时,为了更好地反映数据变化规律,需要采用比较密集的网格,而在计算数据变化梯度较小的部位,为了减小模型规模,则应划分相对稀疏的网格,这样整个结构就表现出疏密不同的网格划分形式。 以齿轮轮齿的有限元分析模型为例,由于分析的目的是求出齿轮啮合传动过程中齿根部分的弯曲应力,因此,分析计算时并不需要对整个齿轮进行计算,可根据圣文男原理将整个区域缩小到直接参与啮合的轮齿。虽然实际上参与啮合的齿数总大于1,但考虑到真正起作用的是单齿,通常只取一个轮齿作为分析对象,这样作可以大大节省计算机内存。考虑到轮齿应力在齿根过渡圆角和靠近齿面处变化较大,网格可划分得密一些。在进行疏密不同网格划分操作时可采用ANSYS提供的网格细化工具调整网格的疏密,也可采用分块建模法设置网格疏密度。 图1所示即为采用分块建模法进行网格划分。图1(a)为内燃机中重要运动零件连杆的有限元应力分析图,由于连杆结构对称于其摆动的中间平面,其厚度方向的尺寸远小于长度方向的尺寸,且载荷沿厚度方向近似均匀分布,故可按平面应力分析处 38 煤 矿 机 械 2005年第1期
有限元分析71831
有限元分析 有限元法的基本思想是将结构离散化,用有限个容易分析的单元来表示复杂的对象,单元之间通过有限个节点相互连接,然后根据变形协调条件综合求解。由于单元的数目是有限的,节点的数目也是有限的,所以称为有限元法(FEM,Finite Element Method)。 有限元法是一种求解关于场问题的一系列偏微分方程的数值方法.这种类型的问题会在许多工程学科中遇到,如机械设计、声学、电磁学、岩土力学、断裂力学、流体力学等.在机械工程中,有限元分析被光分应用在结构、振动和传热问题上。 有限元法是60年代以来发展起来的新的数值计算方法,是计算机时代的产物。虽然有限元的概念早在40年代就有人提出,但由于当时计算机尚未出现,它并未受到人们的重视。随着计算机技术的发展,有限元法在各个工程领域中不断得到深入应用,现已遍及宇航工业、核工业、机电、化工、建筑、海洋等工业,是机械产品动、静、热特性分析的重要手段。早在70年代初期就有人给出结论:有限元法在产品结构设计中的应用,使机电产品设计产生革命性的变化,理论设计代替了经验类比设计。目前,有限元法仍在不断发展,理论上不断完善,各种有限元分析程序包的功能越来越强大,使用越来越方便。 大约在300年前,牛顿和莱布尼茨发明了积分法,证明了该运算具有整体对局部的可加性。虽然,积分运算与有限元技术对定义
域的划分是不同的,前者进行无限划分而后者进行有限划分,但积分运算为实现有限元技术准备好了一个理论基础。 在牛顿之后约一百年,著名数学家高斯提出了加权余值法及线性代数方程组的解法。这两项成果的前者被用来将微分方程改写为积分表达式,后者被用来求解有限元法所得出的代数方程组。在18世纪,另一位数学家拉格郎日提出泛函分析。泛函分析是将偏微分方程改写为积分表达式的另一途经。 在19世纪末及20世纪初,数学家瑞雷和里兹首先提出可对全定义域运用展开函数来表达其上的未知函数。1915年,数学家伽辽金提出了选择展开函数中形函数的伽辽金法,该方法被广泛地用于有限元。1943年,数学家库朗德第一次提出了可在定义域内分片地使用展开函数来表达其上的未知函数。这实际上就是有限元的做法。 所以,到这时为止,实现有限元技术的第二个理论基础也已确立。 20世纪50年代,飞机设计师们发现无法用传统的力学方法分析飞机的应力、应变等问题。波音公司的一个技术小组,首先将连续体的机翼离散为三角形板块的集合来进行应力分析,经过一番波折后获得前述的两个离散的成功。20世纪50年代,大型电子计算机投入了解算大型代数方程组的工作,这为实现有限元技术准备好了物质条件。1960年前后,美国的R. W. Clough教授及我国的冯康教授分别独立地在论文中提出了“有限单元”,这样的名词。此后,这样
CATIA有限元高级划分网格教程
CATIA有限元高级网格划分教程 盛选禹李明志 1.1进入高级网格划分工作台 (1)打开例题中的文件Sample01.CATPart。 (2)点击主菜单中的【开始】→【分析与模拟】→【Advanced Meshing Tools】(高级网格划分工具),就进入【Advanced Meshing Tools】(高级网格划分工具)工作台,如图1-1所示。进入工作台后,生成一个新的分析文件,并且显示一个【New Analysis Case】(新分析算题)对话框,如图1-2所示。 图1-1【开始】→【分析与模拟】→【Advanced Meshing Tools】(高级网格划分工具)(3)在【New Analysis Case】(新分析算题)对话框内选择【Static Analysis】(静力分析)选项。如果以后打开该对话框的时候均希望是计算静力分析,可以把对话框内的【Keep as default starting analysis case】(在开始时保持为默认选项)勾选。这样,下次进入本工作台时,将自动选择静力分析。 (4)点击【新分析算题】对话框内的【确定】按钮,关闭对话框。 1.2定义曲面网格划分参数 本节说明如何定义一个曲面零件的网格类型和全局参数。 (1)点击【Meshing Method】(网格划分方法)工具栏内的【高级曲面划分】按钮
,如图1-3所示。需要在【Meshing Method】(网格划分方法)工具栏内点击中间按钮的下拉箭头才能够显示出【高级曲 面划分】按钮。 图1-2【New Analysis Case】(新分析算题)对话框图1-3【高级曲面划分】按钮
有限元法发展综述
有限元法发展综述 随着现代科学技术的发展,人们正在不断建造更为快速的交通工具、更大规模的建筑物、更大跨度的桥梁、更大功率的发电机组和更为精密的机械设备。这一切都要求工程师在设计阶段就能精确地预测出产品和工程的技术性能,需要对结构的静、动力强度以及温度场、流场、电磁场和渗流等技术参数进行分析计算。例如分析计算高层建筑和大跨度桥梁在地震时所受到的影响,看看是否会发生破坏性事故;分析计算核反应堆的温度场,确定传热和冷却系统是否合理;分析涡轮机叶片内的流体动力学参数,以提高其运转效率。这些都可归结为求解物理问题的控制偏微分方程式往往是不可能的。近年来在计算机技术和数值分析方法支持下发展起来的有限元分析(FEA,Finite Element Analysis)方法则为解决这些复杂的工程分析计算问题提供了有效的途径。 有限元法是一种高效能、常用的计算方法.有限元法在早期是以变分原理为基础发展起来的,所以它广泛地应用于以拉普拉斯方程和泊松方程所描述的各类物理场中(这类场与泛函的极值问题有着紧密的联系)。自从1969年以来,某些学者在流体力学中应用加权余数法中的迦辽金法(Galerkin)或最小二乘法等同样获得了有限元方程,因而有限元法可应用于以任何微分方程所描述的各类物理场中,而不再要求这类物理场和泛函的极值问题有所联系. 一、有限元法的孕育过程及诞生和发展 大约在300年前,牛顿和莱布尼茨发明了积分法,证明了该运算具有整体对局部的可加性。虽然,积分运算与有限元技术对定义域的划分是不同的,前者进行无限划分而后者进行有限划分,但积分运算为实现有限元技术准备好了一个理论基础。 在牛顿之后约一百年,著名数学家高斯提出了加权余值法及线性代数方程组的解法。这两项成果的前者被用来将微分方程改写为积分表达式,后者被用来求解有限元法所得出的代数方程组。在18世纪,另一位数学家拉格郎日提出泛函分析。泛函分析是将偏微分方程改写为积分表达式的另一途经。 在19世纪末及20世纪初,数学家瑞雷和里兹首先提出可对全定义域运用展开函数来表达其上的未知函数。1915年,数学家伽辽金提出了选择展开函数中形函数的伽辽金法,该方法被广泛地用于有限元。1943年,数学家库朗德第一次提出了可在定义域内分片地使用展开函数来表达其上的未知函数。这实际上就是有限元的做法。 所以,到这时为止,实现有限元技术的第二个理论基础也已确立。 20世纪50年代,飞机设计师们发现无法用传统的力学方法分析飞机的应力、应变等问题。波音公司的一个技术小组,首先将连续体的机翼离散为三角形板块的集合来进行应力分析,经过一番波折后获得前述的两个离散的成功。20世纪
有限元复习题答案
1、何为有限元法?其基本思想是什么? 有限元法是一种基于变分法而发展起来的求解微分方程的数值计算方法,该方法以计算机为手段,采用分片近似,进而逼近整体的研究思想求解物理问题。 基本思想是化整为零集零为整。 2、为什么说有限元法是近似的方法,体现在哪里? 有两点:用离散单元的组合体来逼近原始结构,体现了几何上的近似;而用近似函数逼近未知变量在单元内的真实解,体现了数学上的近似。 3、单元、节点的概念? 节点:表达实际结构几何对象之间相互连接方式的概念 单元:网格划分中的每一个小部分称为单元,网格间相互联结点称为节点 4、有限元法分析过程可归纳为几个步骤? 结构离散化、单元分析、整体分析 5、有限元方法分几种?本课程讲授的是哪一种? 位移法、力法、混合法本课程讲授位移法 6、弹性力学的基本变量是什么?何为几何方程、物理方程及虚功方程?弹性矩阵的特点? 弹性力学变量:外力、应力、应变和位移。 描述弹性体应变分量与位移分量之间的方程称为几何方程;物理方程描述应力分量与应变分量之间的关系;弹性体上外力在虚位移发生过程中所做的虚功与储存在弹性体内的需应变能相等。 弹性矩阵由材料的弹性模量和泊松比确定,与坐标位置无关。 7、何为平面应力问题和平面应变问题? 平面应力问题:在结构上满足a几何条件:研究对象是等厚度薄板。b载荷条件:作用于薄板上的载荷平行于板平面且沿厚度方向均匀分布,而在两板面无外力作用。 平面应变问题:满足a几何条件:长柱体,即长度方向的尺寸远远大于横截面的尺寸,且横截面沿长度方向不变。b载荷条件:作用于长柱体结构上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力两条件的弹性力学问题。 1、何为结构的离散化?离散化的目的?何为有限元模型? ①离散化:把连续的结构看成由有限个单元组成的集合体。②目的:建立有限元计算模型③通常把由节点,单元及相应的节点载荷和节点约束构成的模型称为有限元模型2、结构离散化时,划分单元数目的多少以及疏密分布,将直接影响到什么?确定单元数量的原则?通常如何设置节点?
有限元分析的发展趋势
有限元分析的发展趋势 摘要:1965年“有限元”这个名词第一次出现,到今天有限元在工程上得到广泛应用,经历了三十多年的发展历史,理论和算法都已经日趋完善。有限元的核心思想是结构的离散化,就是将实际结构假想地离散为有限数目的规则单元组合体,实际结构的物理性能可以通过对离散体进行分析,得出满足工程精度的近似结果来替代对实际结构的分析,这样可以解决很多实际工程需要解决而理论分析又无法解决的复杂问题。 关键词:有限元分析结构计算结构设计 Abstract: The 1965 "finite" appeared for the first time this term, and today is widely used finite element in engineering, after more than 30 years of history, theory and algorithms have been improved. Finite element discretization of the core idea is to structure, is the actual structure of the supposed discrete combination unit for a limited number of rules, the actual structure to analyse the physical properties can be felt through a discrete body of drawn precision engineering approximation as an alternative to the analysis of actual structures, this would solve a lot of theoretical analysis and practical engineering needed to address complex problems that cannot be resolved. Key words: finite element analysis structural calculation physical design 1 有限元的发展历程 有限元法的发展历程可以分为提出(1943)、发展(1944一1960)和完善(1961-二十世纪九十年代)三个阶段。有限元法是受内外动力的综合作用而产生的。 1943年,柯朗发表的数学论文《平衡和振动问题的变分解法》和阿格瑞斯在工程学中取得的重大突破标志着有限元法的诞生。 有限元法早期(1944一1960)发展阶段中,得出了有限元法的原始代数表达形式,开始了对单元划分、单元类型选择的研究,并且在解的收敛性研究上取得了很大突破。1960年,克劳夫第一次提出了“有限元法”这个名称,标志着有限元法早期发展阶段的结束。 有限元法完善阶段(1961一二十世纪九十年代)的发展有国外和国内两条线索。在国外的发展表现为: 第一,建立了严格的数学和工程学基础;第二,应用范围扩展到了结构力学以外的领域;第三,收敛性得到了进一步研究,形成了系统的误差估计理论;第四,发展起了相应的商业软件包。 近年来随着计算机技术的普及和计算速度的不断提高,有限元分析在工程设计和分析中得到了越来越广泛的重视,已经成为解决复杂的工程分析计算问题的有效途径,现在从汽车到航天飞机几乎所有的设计制造都已离不开有限元分析计算,其在机械制造、材料加工、航空航天、汽车、土木建筑、电子电器,国防军工,船舶,铁道,石化,能源,科学研究等各个领域的广泛使用已使设计水平发生了质的飞跃,主要表现在以下几个方面: 一、增加产品和工程的可靠性; 二、在产品的设计阶段发现潜在的问题 三、经过分析计算,采用优化设计方案,降低原材料成本
有限元分析大作业试题
有限元分析习题及大作业试题 要求:1)个人按上机指南步骤至少选择习题中3个习题独立完成,并将计算结果上交; 2)以小组为单位完成有限元分析计算; 3)以小组为单位编写计算分析报告; 4)计算分析报告应包括以下部分: A、问题描述及数学建模; B、有限元建模(单元选择、结点布置及规模、网格划分方 案、载荷及边界条件处理、求解控制) C、计算结果及结果分析(位移分析、应力分析、正确性分 析评判) D、多方案计算比较(结点规模增减对精度的影响分析、单 元改变对精度的影响分析、不同网格划分方案对结果的 影响分析等) E、建议与体会 4)11月1日前必须完成,并递交计算分析报告(报告要求打印)。
习题及上机指南:(试题见上机指南) 例题1 坝体的有限元建模与受力分析 例题2 平板的有限元建模与变形分析 例题1:平板的有限元建模与变形分析 计算分析模型如图1-1 所示, 习题文件名: plane 0.5 m 0.5 m 0.5 m 0.5 m 板承受均布载荷:1.0e 5 P a 图1-1 受均布载荷作用的平板计算分析模型 1.1 进入ANSYS 程序 →ANSYSED 6.1 →Interactive →change the working directory into yours →input Initial jobname: plane →Run 1.2设置计算类型 ANSYS Main Menu : Preferences →select Structural → OK 1.3选择单元类型 ANSYS Main Menu : Preprocessor →Element T ype →Add/Edit/Delete →Add →select Solid Quad 4node 42 →OK (back to Element T ypes window) → Options… →select K3: Plane stress w/thk →OK →Close (the Element T ype window) 1.4定义材料参数 ANSYS Main Menu : Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic →input EX:2.1e11, PRXY :0.3 → OK 1.5定义实常数 ANSYS Main Menu: Preprocessor →Real Constant s… →Add … →select T ype 1→ OK →input THK:1 →OK →Close (the Real Constants Window)
有限元网格划分
有限元网格划分 摘要:总结近十年有限元网格划分技术发展状况。首先,研究和分析有限元网格划分的基本原则;其次,对当前典型网格划分方法进行科学地分类,结合实例,系统地分析各种网格划分方法的机理、特点及其适用范围,如映射法、基于栅格法、节点连元法、拓扑分解法、几何分解法和扫描法等;再次,阐述当前网格划分的研究热点,综述六面体网格和曲面网格划分技术;最后,展望有限元网格划分的发展趋势。 关键词:有限元网格划分;映射法;节点连元法;拓扑分解法;几何分解法;扫描法;六面体网格 1 引言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。 2 有限元网格划分的基本原则 有限元方法的基本思想是将结构离散化,即对连续体进行离散化,利用简化几何单元来近似逼近连续体,然后根据变形协调条件综合求解。所以有限元网格的划分一方面要考虑对各物体几何形状的准确描述,另一方面也要考虑变形梯度的准确描述。为正确、合理地建立有限元模型,这里介绍划分网格时应考虑的一些基本原则。 2.1 网格数量 网格数量直接影响计算精度和计算时耗,网格数量增加会提高计
算精度,但同时计算时耗也会增加。当网格数量较少时增加网格,计算精度可明显提高,但计算时耗不会有明显增加;当网格数量增加到一定程度后,再继续增加网格时精度提高就很小,而计算时耗却大幅度增加。所以在确定网格数量时应权衡这两个因素综合考虑。 2.2 网格密度 为了适应应力等计算数据的分布特点,在结构不同部位需要采用大小不同的网格。在孔的附近有集中应力,因此网格需要加密;周边应力梯度相对较小,网格划分较稀。由此反映了疏密不同的网格划分原则:在计算数据变化梯度较大的部位,为了较好地反映数据变化规律,需要采用比较密集的网格;而在计算数据变化梯度较小的部位,为减小模型规模,网格则应相对稀疏。 2.3 单元阶次 单元阶次与有限元的计算精度有着密切的关联,单元一般具有线性、二次和三次等形式,其中二次和三次形式的单元称为高阶单元。高阶单元的曲线或曲面边界能够更好地逼近结构的曲线和曲面边界,且高次插值函数可更高精度地逼近复杂场函数,所以增加单元阶次可提高计算精度。但增加单元阶次的同时网格的节点数也会随之增加,在网格数量相同的情况下由高阶单元组成的模型规模相对较大,因此在使用时应权衡考虑计算精度和时耗。 2.4 单元形状 网格单元形状的好坏对计算精度有着很大的影响,单元形状太差的网格甚至会中止计算。单元形状评价一般有以下几个指标: (1)单元的边长比、面积比或体积比以正三角形、正四面体、正六面体为参考基准。 (2)扭曲度:单元面内的扭转和面外的翘曲程度。 (3)节点编号:节点编号对于求解过程中总刚矩阵的带宽和波前因数有较大的影响,从而影响计算时耗和存储容量的大小 2.5 单元协调性 单元协调是指单元上的力和力矩能够通过节点传递给相邻单元。为保证单元协调,必须满足的条件是: (1)一个单元的节点必须同时也是相邻点,而不应是内点或边界
ABAQUS有限元发展趋势
有限元分析的发展趋势 1 有限元的发展历程 有限元方法(FEM)的基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。 有限元法的发展历程可以分为提出、发展和完善三个阶段。有限元法是受内外动力的综合作用而产生的。 现代科学技术的发展,正在不断催生更为快速的交通工具、更大规模的建筑物、更大跨度的桥梁、更大功率的发电机组和更为精密的机械设备。而这一切都要求在设计阶段就能精确地预测出产品和工程的技术性能,需要对结构的静、动力强度以及温度场、流场、电磁场和渗流等技术参数进行分析计算。分析计算高层建筑和大跨度桥梁在地震时所受到的影响;分析计算核反应堆的温度场;分析涡轮机叶片内的流体动力学参数。这些问题的解析计算可归结为求解物理问题的控制偏微分方程式。有限元分析(FEA,Finite Element Analysis)方法则为解决这些复杂的工程分析计算问题提供了有效的途径。在工程实践中,有限元分析软件与CAD系统的集成应用主要表现在以下几个方面: (1)增加设计功能,减少设计成本; (2)缩短设计和分析的循环周期; (3)增加产品和工程的可靠性; (4)采用优化设计,降低材料的消耗或成本; (5)在产品制造或工程施工前预先发现潜在的问题; (6)模拟各种试验方案,减少试验时间和经费; (7)进行机械事故分析,查找事故原因。 目前流行的CAE分析软件主要有NASTRAN、ADINA 、ANSYS、ABAQUS、MARC、COSMOS等。
有限元分析及其应用思考题附答案2012
有限元分析及其应用-2010 思考题: 1、有限元法的基本思想是什么?有限元法的基本步骤有那些?其中“离散”的含义是什 么?是如何将无限自由度问题转化为有限自由度问题的? 答:基本思想:几何离散和分片插值。 基本步骤:结构离散、单元分析和整体分析。 离散的含义:用假想的线或面将连续物体分割成由有限个单元组成的集合,且单元之间仅在节点处连接,单元之间的作用仅由节点传递。当单元趋近无限小,节点无限多,则这种离散结构将趋近于实际的连续结构。 2、有限元法与经典的差分法、里兹法有何区别? 区别:差分法:均匀离散求解域,差分代替微分,要求规则边界,几何形状复杂精度较低; 里兹法:根据描述问题的微分方程和相应的定解构造等价的泛函表达式,求得近似解; 有限元:基于变分法,采用分片近似进而逼近总体的求解微分方程的数值计算方法。 3、一根单位长度重量为q的悬挂直杆,上端固定,下端受垂直向下的外力P,试 1)建立其受拉伸的微分方程及边界条件; 2)构造其泛函形式; 3)基于有限元基本思想和泛函求极值构造其有限元的计算格式(即最小势能原理)。4、以简单实例为对象,分别按虚功原理和变分原理导出有限元法的基本格式(单元刚度矩 阵)。 5、什么是节点力和节点载荷?两者有何区别? 答:节点力:单元与单元之间通过节点相互作用 节点载荷:作用于节点上的外载 6、单元刚度矩阵和整体刚度矩阵各有何特点?其中每个矩阵元素的物理意义是什么(按自 由度和节点解释)? 答:单元刚度矩阵:对称性、奇异性、主对角线恒为正 整体刚度矩阵:对称性、奇异性、主对角线恒为正、稀疏性、带状性。 Kij,表示j节点产生单位位移、其他节点位移为零时作用i节点的力,节点力等于节点位移与单元刚度元素乘积之和。 7、单元的形函数具有什么特点?有哪些性质? 答:形函数的特点:Ni为x,y的坐标函数,与位移函数有相同的阶次。 形函数Ni在i节点的值为1,而在其他节点上的值为0; 单元内任一点的形函数之和恒等于1; 形函数的值在0~1间变化。 8、描述弹性体的基本变量是什么?基本方程有哪些组成? 答:基本变量:外力、应力、应变、位移 基本方程:平衡方程、几何方程、物理方程、几何条件 9、何谓应力、应变、位移的概念?应力与强度是什么关系? 答:应力:lim△Q/△A=S △A→0 应变:物体形状的改变 位移:弹性体内质点位置的变化 10、问题的微分方程提法、等效积分提法和泛函变分提法之间有何关系?何谓“强形 式”?何谓“弱形式”,两者有何区别?建立弱形式的关键步骤是什么?
相关文档
- 有限元网格划分方法与基本原理
- 有限元网格划分
- 有限元网格划分的基本原则
- 在ANSYS平台上的复杂有限元网格划分技术
- 有限元划分网格的基本原则
- 有限元网格划分和收敛性
- 论文:有限元网格划分相关问题分析研究
- _基于ANSYS的有限元法网格划分浅析
- 有限元网格划分
- (完整版)有限元网格剖分方法概述
- ansys有限元网格划分技巧与基本原理
- 有限元网格划分的基本原则
- ANSYS结构有限元分析中的网格划分技术及其应用实例
- 有限元网格划分
- CATIA有限元高级划分网格教程
- ansys有限元软件网格划分精讲
- ANSYS有限元网格划分的基本要点
- 有限元网格划分和收敛性
- ANSYS有限元网格划分的基本原则
- 有限元网格划分