正多面体制作方法

正三角形的画法
第一步:用圆规画一个圆,
第二步:半径不变,把圆规的针脚放在圆周上任意一点P画弧与圆交于两点A、B,
第三步:半径不变,把圆规的针脚放放在点A处再画画弧与圆交于两点P、Q(P是第二步中的P),
第四步:以A、B、Q为顶点作△ABQ,则△ABQ即为圆内接等边△。
P
正四边形的画法
取已知圆O上任一点A,以A为一个分点把⊙O六等分,分点依次为A、B、C、D、E、F。
分别以A、D为圆心,AC、BD为半径作圆交于G,以A为圆心,OG为半径作圆,交⊙O 于M、N,则A、M、D、N即四等分⊙O的圆周。其中的把⊙O六等分,是取AB=AO(因为是等边三角形),以此类推,可得到六等分点可参考图片
F
O
正五边形的画法
①以O为圆心,r为半径画圆,并作互相垂直的直径MN和AP。
②平分半径ON,得OK=KN。
③以K为圆心,KA为半径画弧与OM交于H,AH即为正五边形
的边长。
④以AH为弦长,在圆周上截得A、B、
C、D、E点,
正七变形的画法
P H
①以定长R为半径作圆,并过圆心O作互相垂直
的纵横两条直径MN、HP.
②过N点任作一射线NS,用圆规取七等分,把端
点T与M连结起来,然后过NT上的各点推出MT
的平行线,把MN七等分.
③以M为圆心,MN为半径画弧,和PH的延长线
相交于K点,从K向MN上各分点中的偶数点或
奇数点(图中是1、3、5、7各点)引射线,与交
于A、B、C、M.再分别以AB、BC、CM为边长,
在圆周上从A点(或M点)开始各截一次,得到
其他三点,把这些点依次连结起来,即得近似的正
七边形.
正八边形的画法
O
正九边形的画法
内接9边形画法:先画一个圆。再画两个相互颠倒的内接等边三角形。再把6角星的对角两两相连。得到6个与两个等边三角形的底边的6个交点。选择每一个交点为圆心,到圆内部正六边形的底边的任意一端点的距离为半径,画圆,与大圆产生2个交点。把所有交点画出来再相连,就得到正九边形。
一种球形多面体拼接结构(定稿)z
说明书摘要 本实用新型涉及拼接结构,具体地说是一种球形多面体拼接结构。包括大小和结构均相同的十至三十片圆形插片,各圆形插片上由边缘处沿四个围绕圆心的弦向依次开设第一插槽、第二插槽、第三插槽及第四插槽,各插槽的开槽方向沿同一周向布设、并与圆心的圆心距相等,其中第一插槽和第三插槽相互平行、并分别位于与第一插槽垂直的第一直径的两侧,所述第二插槽和第四插槽相互平行、并分别位于与第二插槽垂直的第二直径的两侧;每片圆形插片通过其上四个插槽分别与另外四片圆形插片插接,与第一插槽和第四插槽插接的两个圆形插片相互插接,与第二插槽和第三插槽插接的两个圆形插片相互插接,依次类推,各圆形插片俩俩依次插接,形成半个或完整的球形多面体拼接结构。本实用新型拼接方便,强度高,不松散。
摘要附图
权利要求书 1. 一种球形多面体拼接结构,其特征在于:包括大小和结构均相同的十至三十片圆形插片(1),各圆形插片(1)上由边缘处沿四个围绕圆心的弦向依次开设第一插槽(21)、第二插槽(22)、第三插槽(23)及第四插槽(24),所述第一插槽(21)、第二插槽(22)、第三插槽(23)及第四插槽(24)的开槽方向沿同一周向布设、并各插槽与圆心的圆心距(s)相等,其中第一插槽(21)和第三插槽(23)相互平行、并分别位于与第一插槽(21)和第三插槽(23)垂直的第一直径(3)的两侧,所述第二插槽(22)和第四插槽(24)相互平行、并分别位于与第二插槽(22)和第四插槽(24)垂直的第二直径(4)的两侧;每片圆形插片(1)通过其上四个插槽分别与另外四片圆形插片(1)插接,与第一插槽(21)和第四插槽(24)插接的相邻两个圆形插片(1)相互插接,与第二插槽(22)和第三插槽(23)插接的相邻两个圆形插片(1)相互插接,依次类推,各圆形插片(1)均与其相邻的圆形插片(1)依次插接,形成半个或完整的球形多面体拼接结构。 2.按权利要求1所述的球形多面体拼接结构,其特征在于:所述第一插槽(21)、第二插槽(22)、第三插槽(23)及第四插槽(24)均为条形豁口。 3.按权利要求2所述的球形多面体拼接结构,其特征在于:所述第一插槽(21)、第二插槽(22)、第三插槽(23)及第四插槽(24)等长,所述第一插槽(21)和第三插槽(23)的盲端超过第一直径(3)、并超过的长度为0~s/10mm,所述第二插槽(22)和第四插槽(24)的盲端超过第二直径(4)、并超过的长度为0~s/10mm。 4.按权利要求2所述的球形多面体拼接结构,其特征在于:所述第一插槽(21)、第二插槽(22)、第三插槽(23)及第四插槽(24)的槽宽均为w,所述圆形插片(1)的厚度为d,则3d>w>d。 5.按权利要求2所述的球形多面体拼接结构,其特征在于:所述第一插槽(21)、第二插槽(22)、第三插槽(23)及第四插槽(24)与圆心的圆心距(s)大于三分之一半径(r)。 6.按权利要求1所述的球形多面体拼接结构,其特征在于:所述第一直径
matlab 蚁群算法 机器人路径优化问题
用ACO 算法求解机器人路径优化问题 4.1 问题描述 移动机器人路径规划是机器人学的一个重要研究领域。它要求机器人依据某个或某些优化原则(如最小能量消耗,最短行走路线,最短行走时间等),在其工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径。机器人路径规划问题可以建模为一个有约束的优化问题,都要完成路径规划、定位和避障等任务。 4.2 算法理论 蚁群算法(Ant Colony Algorithm,ACA),最初是由意大利学者Dorigo M. 博士于1991 年首次提出,其本质是一个复杂的智能系统,且具有较强的鲁棒性,优良的分布式计算机制等优点。该算法经过十多年的发展,已被广大的科学研究人员应用于各种问题的研究,如旅行商问题,二次规划问题,生产调度问题等。但是算法本身性能的评价等算法理论研究方面进展较慢。 Dorigo 提出了精英蚁群模型(EAS),在这一模型中信息素更新按照得到当前最优解的蚂蚁所构造的解来进行,但这样的策略往往使进化变得缓慢,并不能取得较好的效果。次年Dorigo 博士在文献[30]中给出改进模型(ACS),文中 改进了转移概率模型,并且应用了全局搜索与局部搜索策略,来得进行深度搜索。 Stützle 与Hoos给出了最大-最小蚂蚁系统(MAX-MINAS),所谓最大-最小即是为信息素设定上限与下限,设定上限避免搜索陷入局部最优,设定下限鼓励深度搜索。 蚂蚁作为一个生物个体其自身的能力是十分有限的,比如蚂蚁个体是没有视觉的,蚂蚁自身体积又是那么渺小,但是由这些能力有限的蚂蚁组成的蚁群却可以做出超越个体蚂蚁能力的超常行为。蚂蚁没有视觉却可以寻觅食物,蚂蚁体积渺小而蚁群却可以搬运比它们个体大十倍甚至百倍的昆虫。这些都说明蚂蚁群体内部的某种机制使得它们具有了群体智能,可以做到蚂蚁个体无法实现的事情。经过生物学家的长时间观察发现,蚂蚁是通过分泌于空间中的信息素进行信息交流,进而实现群体行为的。 下面简要介绍蚁群通过信息素的交流找到最短路径的简化实例。如图 2-1 所示,AE 之间有
数字正射影像图的设计制作设计说明书_本科论文
目录 一、前言 (1) (一)正射影象图的定义及应用 (1) (二)正射影象图制作过程 (4) 二、数字影象的获取 (5) 三、像片控制点获取及空三加密 (6) (一)像片控制点获取 (7) (二)数字空三加密 (7) 四、制作DEM (9) 五、匀色处理 (13) 六、对影象变形的处理 (15) (一)航摄中产生的影像变形分析 (15) (二)数字微分数字微分纠正的基本原理 (18) (三)影像变形在生产中几种处理方法 (21) 七、影象拼接 (24) 八、数字正射影像图的评价标准 (29) 九、附表 (33)
数字正射影像图的设计制作 内容摘要:数字正射影像图是数字测绘产品(4D产品)中的重要一员,它作为国家高精度空间基础数据数字有着广泛的应用领域;数字正射影像图制作工艺已经基本成熟,在实际生产中,对数字影像资料的正确获取、影像匀色处理、对影像变形的处理、影像拼接对最终的正射影像图的质量有着重要的影响,这个过程要在生产实践中总结经验,改善生产工艺与提高作图员对影像的感性认识才能做的更好。 关键词:正射影像图匀色处理影像变形的处理影像拼接 引言:20世纪以来,航空摄影测量与遥感成像技术的发展,使得测绘工作者能够以较高精度、快速高效地进行大面积测图。除了传统意义上的以手工绘制的线条和符号表达地图外,光学成像技术带来了另外一种测绘产品,即具有数学坐标信息、内容丰富、能够直观反映地表乃至地下信息的数字正射影像图。 一前言 (一)正射影象图的定义及应用 数字正射影像图(Digital Orthophoto Map,缩写DOM)是利用DEM对经过扫描处理的数字化航空像片或遥感影像(单色或彩色),经逐像元进行辐射改正、微分纠正和镶嵌,并按规定图幅范围裁剪生成的形象数据,带有公里格网、图廓(内、外)整饰和注记的平面图。 DOM同时具有地图几何精度和影像特征,精度高、信息丰富、直观真实、制作周期短。它可作为背景控制信息,评价其它数据的精度、现实性和完整性,也可从中提取自然资源和社会经济发展信息,为防灾治害和公共设施建设规划等应用提供可靠依据。 数字正射影像图是数字测绘产品(4D产品)中的重要一员。它是利用数字化自动摄影测量系统生产的一种新的数字化测绘产品,在生成正射影像的同时,还可以得到数字地面高程数据,等高线图,生成该区域内三维景观图等。
基于蚁群算法的路径规划
MATLAB实现基于蚁群算法的机器人路径规划 1、问题描述 移动机器人路径规划是机器人学的一个重要研究领域。它要求机器人依据某个或某些优化原则(如最小能量消耗,最短行走路线,最短行走时间等),在其工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径。机器人路径规划问题可以建模为一个有约束的优化问题,都要完成路径规划、定位和避障等任务。 2 算法理论 蚁群算法(Ant Colony Algorithm,ACA),最初是由意大利学者Dorigo M. 博士于1991 年首次提出,其本质是一个复杂的智能系统,且具有较强的鲁棒性,优良的分布式计算机制等优点。该算法经过十多年的发展,已被广大的科学研究人员应用于各种问题的研究,如旅行商问题,二次规划问题,生产调度问题等。但是算法本身性能的评价等算法理论研究方面进展较慢。 Dorigo 提出了精英蚁群模型(EAS),在这一模型中信息素更新按照得到当前最优解的蚂蚁所构造的解来进行,但这样的策略往往使进化变得缓慢,并不能取得较好的效果。次年Dorigo 博士给出改进模型(ACS),文中改进了转移概率模型,并且应用了全局搜索与局部搜索策略,来得进行深度搜索。Stützle 与Hoos给出了最大-最小蚂蚁系统(MAX-MINAS),所谓最大-最小即是为信息素设定上限与下限,设定上限避免搜索陷入局部最优,设定下限鼓励深度搜索。蚂蚁作为一个生物个体其自身的能力是十分有限的,比如蚂蚁个体是没有视觉的,蚂蚁自身体积又是那么渺小,但是由这些能力有限的蚂蚁组成的蚁群却可以做出超越个体蚂蚁能力的超常行为。蚂蚁没有视觉却可以寻觅食物,蚂蚁体积渺小而蚁群却可以搬运比它们个体大十倍甚至百倍的昆虫。这些都说明蚂蚁群体内部的某种机制使得它们具有了群体智能,可以做到蚂蚁个体无法实现的事情。经过生物学家的长时间观察发现,蚂蚁是通过分泌于空间中的信息素进行信息交流,进而实现群体行为的。 下面简要介绍蚁群通过信息素的交流找到最短路径的简化实例。如图2-1 所示,AE 之间有两条路ABCDE 与ABHDE,其中AB,DE,HD,HB 的长度为1,BC,CD 长度为0.5,并且,假设路上信息素浓度为0,且各个蚂蚁行进速度相同,单位时间所走的长度为1,每个单位时间内在走过路径上留下的信息素的量也相同。当t=0时,从A 点,E 点同时各有30 只蚂蚁从该点出发。当t=1,从A 点出发的蚂蚁走到B 点时,由于两条路BH 与BC 上的信息素浓度相同,所以蚂蚁以相同的概率选择BH 与BC,这样就有15 只蚂蚁选择走BH,有15 只蚂蚁选择走BC。同样的从E 点出发的蚂蚁走到D 点,分别有15 只蚂蚁选择DH 和DC。当t=2 时,选择BC 与DC的蚂蚁分别走过了BCD 和DCB,而选择BH 与DH 的蚂蚁都走到了H 点。所有的蚂蚁都在所走过的路上留下了相同浓度的信息素,那么路径BCD 上的信息素的浓度是路径BHD 上信息素浓度的两倍,这样若再次有蚂蚁选择走BC 和BH 时,或选择走DC 与DH 时,都会以较大的概率选择信息素浓度高的一边。这样的过程反复进行下去,最短的路径上走过的蚂蚁较多,留下的信息素也越多,蚁群这样就可以找到一条较短的路。这就是它们群体智能的体现。 蚁群算法就是模拟蚂蚁觅食过程中可以找到最短的路的行为过程设计的一种仿生算法。在用蚁群算法求解组合优化问题时,首先要将组合优化问题表达成与信息素相关的规范形式,然后各个蚂蚁独立地根据局部的信息素进行决策构造解,并根据解的优劣更新周围的信息素,这样的过程反复的进行即可求出组合优化问题的优化解。 归结蚁群算法有如下特点: (1)分布式计算:各个蚂蚁独立地构造解,当有蚂蚁个体构造的解较差时,并不会影响整体的求解结果。这使得算法具有较强的适应性; (2)自组织性:系统学中自组织性就是系统的组织指令是来自系统的内部。同样的蚁
使用GeoGebra软件构造多面体立体图形
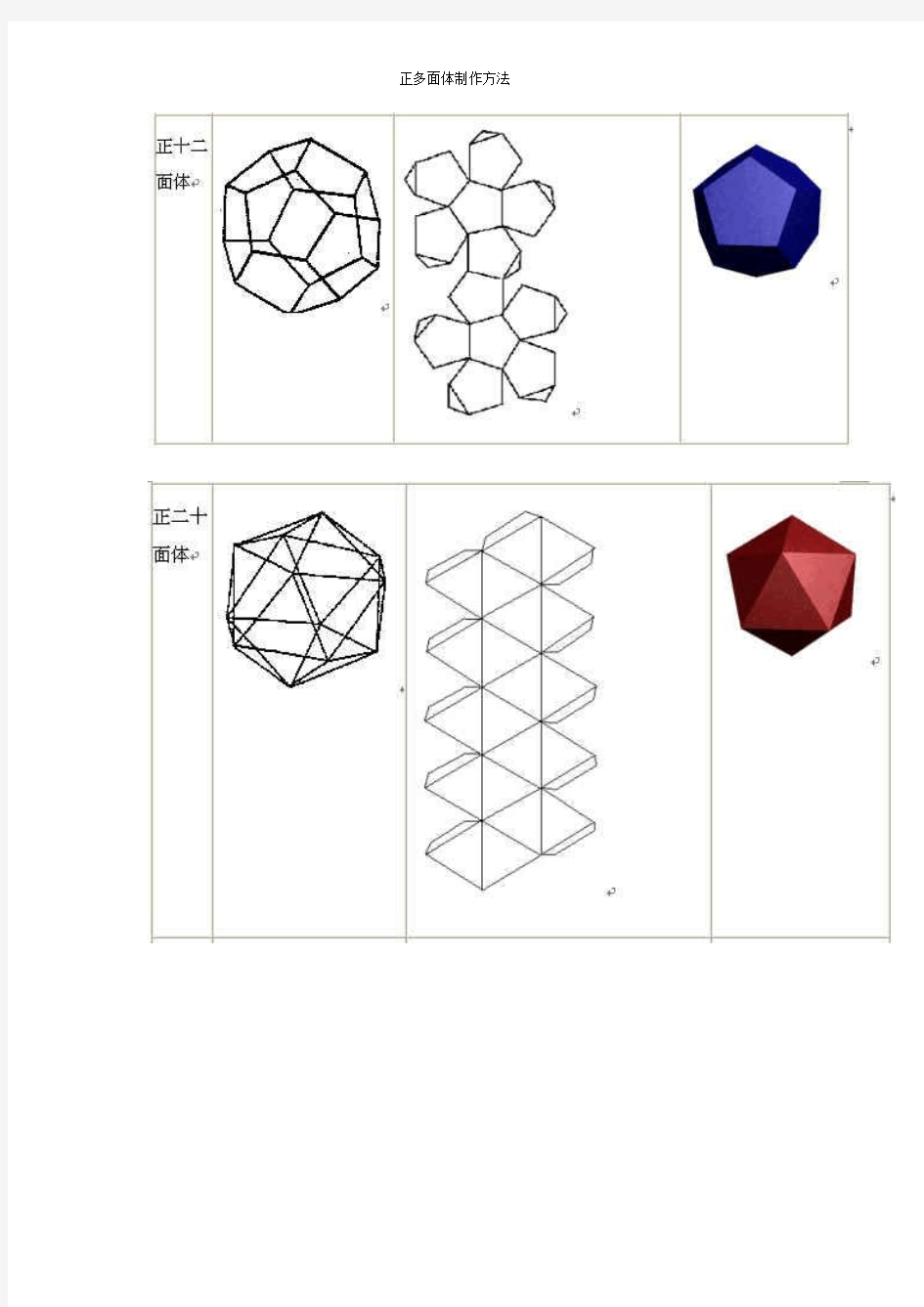
使用GeoGebra软件构造多面体立体图形 摘要:本文主要介绍使用软件GeoGebra绘制多面体的方法。首先简单介绍GeoGebra软件的窗口功能,简单绘图方法;之后对几种常见的多面体进行简单介绍;然后,结合具体实例介绍在GeoGebr中实现三维空间中动态旋转的正八面体 和截角正四面体、截半正方体的构造,进而展现多面体构造过程和使用GeoGebra 软件给数学学习带来的便利。最后,介绍足球、菱形六十面体等复杂多面体的构 造方法。 关键词:GeoGebra 多面体 1. GeoGebra软件简介 GeoGebra是一款动态数学画图软件,绘图内容包含几何、代数、图形、表格等。GeoGebra的优越性体现在:一方面,GeoGebra是一个几何软件,可以在上 面画点、线段、向量、多边形、直线、圆锥曲线和函数,也可以根据需要设计图 形的颜色、显示方式等;另一方面,也可以通过直接输入曲线方程或点坐标或图 形名称的方式,直接画出所需要的图形。因此,GeoGebra既可以处理变化的量(例如数据、向量、角度等),也可以对数值进行计算(例如函数的微分和积分,求解方程等)。由此可见,GeoGebra是一款可以处理代数问题也可以处理几何图形问题的软件。 下面首先介绍一下GeoGebra软件的操作界面及基本使用规则。 图1.1 如图1.1所示,用户操作界面是标准的窗口操作界面,有代数区、绘图区、 菜单栏和工具栏。其中代数区显示图形中的点、线、面、变量等基本要素信息; 绘图区显示所画出的图形,可以隐藏、设置颜色等;菜单栏中的“窗口”选项和文 件中的“新建”选项都可以创建新的图形。创建时可以建立新的绘图区域,在视图 中可以选择该区域的类型(绘图区2、代数运算区、作图过程、概率统计、3D绘 图区等)。GeoGebra的重要的窗口有几何窗口、代数窗口和工作表窗口。1 2. 多面体图形简介 2.1多面体图形的基本性质 多面体是指由多个平面多边形围成的几何体。常见的多面体有凸多面体、简 单多面体、正多面体等,多面体图形有以下简单的性质: i. 一个多面体最少由四个面组成。多面体按面数可以分为四面体、五面体、 六面体 等。 ii. 欧拉公式:定点数+面数-棱数=2。 2.2多面体图形的类型 多面体根据面与棱的分布特点亦可分为棱锥、棱柱、正多面体等。 图2.1多面体图形 2.2.1正多面体 正多面体又称柏拉图体(Platonic Solids),指多面体的各个面都是全等的正多边形。共 有五种:正四面体(Tetrahedron)、正六面体或正方体(Hexahedron或Cube)、正八面体(Octahedron)、正十二面体(Dodecahedron)、正二十面体(Icosahedron)。
浅析正射影像图和数字线划图要点
浅析正射影像图和数字线划图 的制作 【摘要】:本文阐述了如何制作数字正射影像图(DOM),制作的方法和各项技术要求,精度指标以及存在问题,对全数字摄影测量的数字化(DLG)作业过程和精度进行了一些探讨及理论上的分析。本文第一章介绍福州数字正射影像图(DOM)的工作流程和各项技术要求,第二章对数字线划图(DLG)在永安至宁化高速公路中的应用和各项技术要求作了简要介绍。 【关键词】:正射影像图DOM 质量精度数字线划图DLG 航测
第一章引言 随着计算机技术、数字图像处理、模式识别、人工智能、专家系统以及计算机视觉等学科的不断发展,摄影测量经模拟摄影测量开始,经解析摄影测量阶段,进入全数字摄影测量阶段,虽然摄影测量的基本原理并没有发生很大改变,但其技术手段发生了根本性的变革,极大的丰富了数字摄影测量的内涵和外延。经过几年DOM(正射影像图)和DLG(数字线划图)产品的生产实践和检验,各项方法和技术已日趋成熟。以下结合生产实际,对产品的制作过程及精度指标以及存在问题如何解决进行了分析和总结。
第二章正射影像图(DOM) 第一节概念 数字正射影像图(DOM):是利用数字高程模型对扫描数字化(或直接为数字方式)的航空、航天影像,以数字微分纠正、数字镶嵌,再图幅范围进行裁切生成的影像数据集。 第二节福州正射影像图 要如何完成福州测区1:2000彩色正射影像图的制作呢?下面就这一制作过程作一简要概述: 一.项目范围及地理概况(福州测区1:2000彩色正射影像图) 测区范围:东经119°09’01”---119°29’01” 北纬 25°58’57”---26°09’44” 本测区计有1:2000图幅328幅,面积346.675km2,行政隶属福州市鼓楼,台江,仓山,晋安,闽侯6个区县。相对于1980西安坐标系纵坐标为2875.0—2895.0km,横坐标415.0—448.3km;即测区西自闽侯县上街镇庄南村,东至鼓山半山亭,南起仓山区城门镇胪雷村,北止晋安区新店镇岭胶,东南延伸至马尾罗星塔客运码头。 二.资料情况 1、控制资料:采用2003年5月外业控制成果,航外像片控制采用区域网点布点方案,不规则区域网布点按《航外规范》4.2.3.4条文执行。当遇到像片主点,标准点位落水,海湾岛屿地区航摄漏洞等特殊情况,不能按正常情况布点时,按《航外规范》4.5条文执行。 2、航摄资料:由煤航集团航空数码摄影公司于2002年9月至2003年1月组织航摄。 航摄仪技术参数
蚁群算法最优路径
机器人的路径规划---蚁群算法 1.蚁群算法 众所周知,蚁群算法是优化领域中新出现并逐渐引起重视的一种仿生进化算法它是群体智能的典型实现,是一种基于种群寻优的启发式搜索算法。自从M.Dorigo等意大利学者在1991年首先提出蚁群算法(Ant Colony System,ACS)以来,这种新型的分布式智能模拟算法已逐渐引起人们的注意并得到广泛的使用。 蚁群算法的特点主要表现在以下五个方面: (1)蚂蚁群体行为表现出正反馈过程。蚁群在寻优的过程中会释放一定量的信息素,蚁群的规模越大,释放的信息素的量也就越大,而寻优路径上存在的信息素浓度越高,就会吸引更多的蚂蚁,形成一种正反馈机制,然后通过反馈机制的调整,可对系统中的较优解起到一个自增强的作用,从而使问题的解向着全局最优的方向演变,最终能有效地获得全局相对较优解。 (2)蚁群算法是一种本质并行的算法。个体之间不断进行信息交流和传递.有利于最优解的发现,并在很大程度上减少了陷于局部最优的可能。 (3)蚁群算法易于和其他方法结合。蚁族算法通过和其他算法的结合,能够扬长避短,提高算法的性能。 (4) 蚁群算法提供的解具有全局性的特点。一群算法是一种群只能算法,每只蚂蚁巡游的过程相对独立,他们会在自己的活动空间进行搜索,蚂蚁在寻优过程中通过释放信息素,相互影响,互相通信,保证了解的全局性。 (5) 蚁群算法具有鲁棒性。蚁族算法的数学模型易于理解,可以广泛使用在很多复杂的优化问题中,蚁族算法区别于传统优化算法的一个特点在于该算法不依赖于初始点的选择,受初始点的影响相对较小,并且在整个算法过程中会自适应的调整寻优路径。 由此可见,在机器人寻找最优路径的过程中,采用蚁群算法实现路径的规划问题,可以高效,准确的找到最优的路径。 2.移动机器人的路径规划 2.1环境信息处理 假设机器人运行环境为边长分别为x和Y的矩形区域,在矩形区域内分布有n
数字正射影像图制作方法的研究
论文题目:数字正射影像图制作方法的研究 专业:测绘工程 本科生:解云飞(签名) 指导教师:郭岚(签名) 摘要 随着生产技术与测绘科技的不断发展, 数字正射影像图作为4D 数字测绘产品之一, 应用领域极其广泛。现今,生产数字正射影像图的方法已日臻成熟,由传统的数字微分纠正法发展到许多快速制作正射影像图的新方法。但是,怎样实时地控制生产质量,提高生产效率,满足快速生产数字正射影像图的需要,日益成为一个迫切需要解决的问题。 本文首先对国内外研究现状进行了分析,说明了在生产过程中控制好生产质量,提高效率的重要性。其次,对数字正射影像的制作方法进行了研究。阐述了DOM的制作原理和数学模型,分析和比较了传统制作方法:数字摄影测量法和单片数字微分纠正的特点;接着对基于POS系统快速制作DOM新方法进行了详细的介绍。然后,对在生产过程中,采用这些方法制作DOM的质量控制问题进行了探讨,总结了DOM制作过程中质量控制的措施。最后在前面研究的基础上,以某城市的航空像片为处理对象,利用ERDAS IMAGINE实现了正射影像图的制作,对制作过程进行了详细的说明和分析,提出了本次实验的质量控制特点,为实际的生产提供了借鉴。 【关键词】数字正射影像,质量控制,POS系统,ERDAS IMAGINE
Subject :The research of Digital Orthophoto Map production methods Specialty :Surveying and Mapping Engineering Name :xieyunfei(Signature) Instructor:guolan (Signatrue) ABSTRACT With the production technology and the continuous development of mapping technology, as one of the 4D digital mapping products, the Digital Orthophoto Map has wide applications. Now, the methods of producing Digital Orthophoto have been matured from the traditional Digital photography methods developed into many new methods, and have corrected the rapid production of many Orthoimage Map. However, how to control the production in real-time, improve production efficiency to meet the rapid production of digital photography has increasingly become a pressing question to resolve. First of all, this paper analyzes the research status at home and abroad, shows the importance of controlling production quality and improving efficiency during the production process. Secondly, study the method of the digital orthophoto production. Analyze the principles and mathematic model of DOM, have a comparison of the traditional production methods-digital photography and digital single-chip. Then, tell the quick DOM production method-POS-based system in detail. Thirdly, it is discussed that the quality-control when using the methods in the production. Sum up the measures for the quality-control during the process of DOM production. Finally, based on the above research work, using ERDAS IMAGINE produces DOM by dealing with the map of air photography of a certain city. Introducing a detailed Description and analysis of production process of the DOM, provides the character of quality-control according to the experiment. It is a reference for a real production. Key words: Digital Orthophoto, quality control, POS systems , ERDAS IMAGINE
matlab_蚁群算法_机器人路径优化问题
用ACO算法求解机器人路径优化问题 4.1问题描述 移动机器人路径规划是机器人学的一个重要研究领域。它要求机器人依据某个或某些优化原则(如最小能量消耗,最短行走路线,最短行走时间等),在其工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径。机器人路径规划问题可以建模为一个有约束的优化问题,都要完成路径规划、定位和避障等任务。 4.2算法理论 蚁群算法(Ant ColonyAlgorithm,ACA),最初是由意大利学者Dorigo M. 博士于1991 年首次提出,其本质是一个复杂的智能系统,且具有较强的鲁棒性,优良的分布式计算机制等优点。该算法经过十多年的发展,已被广大的科学研究人员应用于各种问题的研究,如旅行商问题,二次规划问题,生产调度问题等。但是算法本身性能的评价等算法理论研究方面进展较慢。 Dorigo提出了精英蚁群模型(EAS),在这一模型中信息素更新按照得到当前最优解的蚂蚁所构造的解来进行,但这样的策略往往使进化变得缓慢,并不能取得较好的效果。次年Dorigo博士在文献[30]中给出改进模型(ACS),文中 改进了转移概率模型,并且应用了全局搜索与局部搜索策略,来得进行深度搜索。 Stützle 与Hoos给出了最大-最小蚂蚁系统(MAX-MINAS),所谓最大-最小即是为信息素设定上限与下限,设定上限避免搜索陷入局部最优,设定下限鼓励深度搜索。 蚂蚁作为一个生物个体其自身的能力是十分有限的,比如蚂蚁个体是没有视觉的,蚂蚁自身体积又是那么渺小,但是由这些能力有限的蚂蚁组成的蚁群却可以做出超越个体蚂蚁能力的超常行为。蚂蚁没有视觉却可以寻觅食物,蚂蚁体积渺小而蚁群却可以搬运比它们个体大十倍甚至百倍的昆虫。这些都说明蚂蚁群体内部的某种机制使得它们具有了群体智能,可以做到蚂蚁个体无法实现的事情。经过生物学家的长时间观察发现,蚂蚁是通过分泌于空间中的信息素进行信息交流,进而实现群体行为的。 下面简要介绍蚁群通过信息素的交流找到最短路径的简化实例。如图 2-1 所示,AE 之间有
正射影像图制作技术方案
东莞市市域卫星数字正射影像图投标文件技术方案 国家遥感应用工程技术研究中心 北京超图地理信息技术有限公司 2003年6月
目录 一、项目背景-------------------------------------------------------------------------------------------- 3 二、项目预期目标-------------------------------------------------------------------------------------- 4 三、项目建设原则-------------------------------------------------------------------------------------- 6 四、用户需求-------------------------------------------------------------------------------------------- 8 五、项目的设计思想及可行性技术方案---------------------------------------------------------- 10 六、数据处理和制图质量保证措施---------------------------------------------------------------- 21 七、关于技术保障的进一步说明------------------------------------------------------------------- 22 八、项目实施进度计划------------------------------------------------------------------------------- 24 九、技术服务、售后服务计划及承诺------------------------------------------------------------- 26
塑料吸管制作的多面体
塑料吸管制作多面体 ——国外青少年DIY科技动手做介绍(二) 每年暑假期间(7月底至8月初),日本都举办有“日本全国青少年科学实验节”。近二十年,已成为传统性的活动,很受日本中小学生、家长、教师的欢迎。在活动期间,设在东京的主会场每天都有一万多人来活动。开展的活动项目全部都是由青少年亲自动手实验、亲自动手制作。每天有七、八十个项目,每个项目所需要的器材、材料由大会组织者和项目组织者提供给中小学生,且可以把实验、制作的作品免费带走。本栏目将向大家介绍一些日本青少年科技节中有趣的、取材方便、制作简单的项目。 本文介绍的是一个数学DIY的项目,非常有趣味,且取材于日常、身边常见的塑料吸管、橡皮筋,用它们来设计、搭建一些立体几何体,以帮助人们建立立体几何的空间感,以利于数学的学习和空间想象力。 图一2009年日本“全国青少年科学实验节”上,“塑料吸管制作多面体”的展台 丁云涛摄 利用塑料吸管、橡皮筋可以搭建正多面体(正四面体、正六面体、正八面体、正十二面体、正二十面体)以及其它多面体、C60(即碳60)的化学结构(足球形)等。下面我们介绍正四面体和正十二面体的制作方法。
正四面体的制作 正四面体是由四个等边三角形构成的立体几何体。 材料:塑料吸管、橡皮筋(下面以120mm长为例)四根、透明胶条 工具:刻度尺、剪刀、 制作过程: 1、将塑料吸管剪裁成38mm长的小段,共需6段; 2、顺着吸管长度用剪子剪开一条口子; 3、用橡皮筋将塑料吸管段穿成串 ○1一根橡皮筋穿有三个塑料吸管段(此时构成一个等边三角形)一个 ○2一根橡皮筋穿有两个塑料吸管段一个 ○3一根橡皮筋穿有一个塑料吸管段一个 4、将○2(穿有两个塑料吸管段的橡皮筋)穿过○1(穿有三个塑料吸管段已成三角形的)中的一根吸管段;此时构成两个连接在一起的两个三角形; 5、将○3(穿有一个塑料吸管段的橡皮筋)穿过○1、○2中各一个吸管段,此时已形成一个正四面体; 6、此时的正四面体共有六根吸管段,其中三根吸管段都有两根橡皮筋穿过,另三根吸管段都只有一个橡皮筋穿过,为保证正四面体的牢固、稳定性,我们再用一根橡皮筋分别穿过只有一个橡皮筋的吸管段。必要时,可用透明胶条将开口封上。 此时一个漂亮的立体几何形状——正四面体就完成了!
蚁群算法在路径优化中的应用3改
蚁群算法在路径优化中的应用 作者:孙阳阳指导老师:刘冲 摘要针对蚁群算法在路径中的优化问题,本文首先介绍了蚁群算法的概念及其原理,利用数学 形式建立算法模型.根据蚁群算法计算的基本步骤来分析蚁群算法在交通路径优化、TSP问题等3 个方面的应用,由实验结果可知蚁群算法在路径优化中具有很好的可行性和优越性,能起到很 好的效果. 关键词蚁群算法算法模型算法步骤分析应用 1 引言 路径规划是指在具有障碍物的环境下,在符合某种评价条件中,寻找到一条从起始地点到目标地点最优的路径.蚁群算法是近几年优化领域中新出现的一种启发式仿生类并行智能进化系统,计算法采用分布式并行计算和正反馈机制,且易于其它算法结合,目前已有许多关于其在路径规划方面的文献. 建立蚁群算法模型]2][1[,解决城市交通路径优化问题,实验结果表面在搜索效率和搜索最优解的能力两方面都有很大的提高.但是传统蚁群算法易陷入局部最优解和收敛速度较 4[ ,将传统蚁群算法进行改进,例如与栅格法相结合、慢,为此在机器人路径规划的应用中]7 在几何模型下建立模型等.提高了算法的有效性和鲁棒性,解决了蚁群过早陷入局部最优解的问题,扩大了蚂蚁的搜索空间,增强了蚁群算法在机器人路径规划中的适应能力. 本文通过对蚁群算法的研究以及解决几实际路径规划问题,得出了蚁群算法是有其可行性和优越性的,说明了该算法可以在众多优化领域中得到广泛的应用. 2 蚁群算法 蚁群算法(ant colony optimization),又称蚂蚁算法,简称ACO.是由Dorigom、Maniezzov、Colorni等人在1992年所发表的论文提出的,其灵感来源于蚂蚁在寻找食物中发现路径的行为.它是一种模拟进化算法,通过人工模拟蚂蚁觅食过程,即个体间的信息交流与合作不断排除不适合的路途,最终寻找到从蚁穴到食物源的最短路径. 2.1 蚁群算法的基本原理 蚂蚁在搜寻食物过程中总能找到一条从蚁穴到到食物的最优路径,这是因为蚂蚁在搜寻路径上释放一种特殊的信息素.当它们遇到一个还没有被走过的路口时,会随机的选择一条路径,而选择的路径与信息素的浓度有关,同时在该路径上它们也会释放自己的信息素.路径越短,信息素浓度越大;反正路径越长信息素堆积的越少.则过一段时间蚂蚁选择信息素浓度高的路径的概率越来越大,而其它路径随着蚂蚁越来越少的选择信息素浓度逐渐减小,这一就形成了一个正反馈现象,最终指导整个蚁群找到从蚁穴到食物源的最短路径. 2.2 蚁群算法的数学模型 2.2.1 问题的描述
蚁群算法路径优化算法
其中,表示在t时刻蚂蚁k由元素(城市)i转移到元素(城市)j的状态转移概率。allowedk = C ? tabuk表示蚂蚁k下一步允许选择的城市。α为启发式因子,表示轨迹的相对重要性,反映了蚂蚁在运动过程中所积累的信息在蚂蚁运动时所起的作用,其值越大,则该蚂蚁越倾向于选择其他蚂蚁经过的路径,蚂蚁之间的协作性越强。β为期望启发式因子,表示能见度的相对重要性,反映了蚂蚁在运动过程中启发信息在蚂蚁选择路径中的受重视程度,其值越 大,则该状态转移概率越接近于贪心规则;ηij(t) 为启发函数,表达式为。式中,dij表示相邻两个城市之间的距离。(6)修改禁忌表指针,即选择好之后将蚂蚁移动到新的元素(城市),并把该元素(城市)移动到该蚂蚁个体的禁忌表中。(7)若集合C中元素(城市)未遍历完,即k for i=1:NC % 计算各城市间的距离 for j=1:NC distance(i,j)=sqrt((CooCity(i,2)-CooCity(j,2))^2+(CooCity(i,3)-CooCity(j,3))^2); end end MAXIT=10;%最大循环次数 Citystart=[]; % 起点城市编号 tau=ones(NC,NC); % 初始时刻各边上的信息痕迹为1 rho=0.5; % 挥发系数 alpha=1; % 残留信息相对重要度 beta=5; % 预见值的相对重要度 Q=10; % 蚁环常数 NumAnt=20; % 蚂蚁数量 routelength=inf; % 用来记录当前找到的最优路径长度 for n=1:MAXIT for k=1:NumAnt %考查第K只蚂蚁 deltatau=zeros(NC,NC); % 第K只蚂蚁移动前各边上的信息增量为零 %[routek,lengthk]=path(distance,tau,alpha,beta,[]); % 不靠率起始点[routek,lengthk]=path(distance,tau,alpha,beta,Citystart); % 指定起始点if lengthk 正多面体 有一次一个平常的英国孩子詹姆斯,在醉心于制作多面体模型时,写信给父亲:“……我做了四面体、十二面体以及两个不知道名称的多面体.”他当时还是一个毫无名气的孩子.这些话意味着伟大物理学家詹姆斯·克拉克·麦克斯韦尔诞生了.想象一下,你们自己和你们亲人醉心于制作几何物体模型的情形. 本书的这几页是家庭作业.新年临近,这是最欢乐和美丽的节日.除了传统的枫树装饰(炮仗和小挂灯)外,你们可以制作几何玩具.这是用彩色纸做成的正多面体模型.考察下图,在这图上画着四面体、正方体、八面体、十二面体和二十面体.它们的形状是完美的典型! 你们能觉察到一系列有趣的特点,也正是这些性质使它们得到了相应的名称.每一个正多面体的所有面都是相同的正多边形,在每一个顶点集聚着同样数量的棱,而相邻的面在相等角下毗连. 数一下每一个多面体具有的顶点数(V)、棱数(E)和面数(F),并且把结果记入表中. 在最后一栏,这些多面体得到的是同一个结果:V+F-E=2.最令人惊奇的是它不仅对正多面体,而且对所有多面体都正确! 若有兴趣你们可以对某些胡乱取得的多面体进行验证.最伟大的数学家之一列昂纳德·欧拉(1707-1783)证明了这一令人惊叹的关系式,因此公式以他命名:欧拉公式.这位出生于瑞士的天才学者几乎整个一生居住在俄罗斯,我们完全有理由和自傲地将他引为自己的同胞. 正多面体还有一个特点.我们发现:正四面体有一性质:如果把它的每个面的中心作为新的多面体的顶点,那么我们重新得到一个正四面体.余下的4个正多面体恰可分成两对.正方体各面的中心组成一个正八面体,而正八面体各面的中心则组成正方体.同样,可以发生的另一对类似联系是正十二面体和正二十面体. 正多面体所具有的完美的形状和漂亮的数学规律使这五种几何物体具有某种神秘色彩,以致于很久以前它们就是神术者和占星家的必要伴侣.如果你们致力于正多面体的研究和制作,那么肯定会使你们感到欢乐和满意,甚至有可能在新的一年里给你带来好运气! 在下图中给出这些枞树上玩具的展开图.在制作模型时不要忘记在需要的地方留一片瓣膜为粘接用. 蚁群算法在车辆路径问题中的应用 摘要 蚁群算法(Ant Colony Optimization, ACO)是意大利学者M.Dorigo等人通过模拟蚁群觅食行为提出的一种基于种群的模拟进化算法。通过介绍蚁群觅食过程中基于信息素(pheromone)的最短路径的搜索策略,给出了基于MATLAB的蚁群算法在车辆路径问题(Vehicle Routing Problem, VRP)中的应用。蚁群算法采用分布式并行计算机制,易于其他方法结合,而且具有较强的鲁棒性,但搜索时间长,容易陷入局部最优解。针对蚁群算法存在的过早收敛问题,加入2—opt方法对问题求解进行了局部优化,计算机仿真结果表明,这种混合型蚁群算法对求解车辆路径问题有较好的改进效果。 关键词:蚁群算法、组合优化、车辆路径问题、2-opt方法 1.车辆路径问题 车辆路径问题(VRP)来源于交通运输,1959年由Dantzig 提出,它是组合优化问题中一个典型的NP-hard问题。最初用于研究亚特兰大炼油厂向各个加油站投送汽油的运输路径优化问题,并迅速成为运筹学和组合优化领域的前沿和研究热点。 车路优化问题如下: 已知有一批客户,各客户点的位置坐标和货物需求已知,供应商具有若干可供派送的车辆,运载能力给定,每辆车都是从起点出发,完成若干客户点的运送任务后再回到起点。 现要求以最少的车辆数和最少的车辆总行程来完成货物的派送任务。 2、蚁群系统基本原理 在蚂蚁群找到食物时,它们总能找到一条从食物到蚁穴之间的最短路径。因为蚂蚁在寻找食物时会在路途上释放一种特殊的信息素。当它们碰到一个还没有走过的路口时,会随机地挑选一条路径前行。与此同时释放出与路径长度有关的信息素。路径越长,释放的激素浓度越低。当后面的蚂蚁再次碰到这个路口时,会选择激素浓度较高的路径走。这样形成了一个正反馈,最优路径上的激素浓度越来越高,而其他的路径上激素浓度却会随时间的流逝而消减。最终整个蚁群会找出最优路径。在整个寻找过程中,整个蚁群通过相互留下的信息素作用交换着路径信息,最终找到最优路径。 3、基本蚁群算法求解车辆路径问题 求解VRP问题的蚂蚁算法中,每只蚂蚁是一个独立的用 于构造路线的过程,若干蚂蚁过程之间通过信息素值来交换信息,合作求解,并不断优化。这里的信息素值分布式存储在图 三年级科技小制作-正多面体 正多面体这个是三年级科技小制作,所谓正多面体是指多面体的各个面均呈全等正多边形,每个正多面体的各边的长和顶角的交角均相等。常见正多面体有:正四面体、正六面体、正八面体、正十二面体、正二十面体。三年级科技小制作所需材料和工具:纸板、白胶、铅笔、直尺、广告色、剪刀、美工刀 三年级科技小制作制作过程: 三年级科技小制作相关知识●魔方 魔方,又叫魔术方块,也称鲁比克方块,是匈牙利布达佩斯建筑学院厄尔诺·鲁比克教授于1974年发明的,魔方系由富于弹性的硬塑料制成的六面正方体。魔方与中国人发明的“华容道”,法国人发明的“独立钻石”一起被称为智力游戏界的三大不可思议,而魔方受欢迎的程度更是智力游戏界的奇迹。当初厄尔诺·鲁比克教授发明魔方,仅仅是作为一种帮助学生增强空间思维能力的教学工具。但要使那些小方块可以随意转动而不散开,不仅是个机械难题,还牵涉到木制的轴心、座和榫头等问题。直到魔方在手时,他将魔方转了几下后,才发现如何把混乱的颜色方块复原竟是个有趣而且困难的问题。厄尔诺·鲁比克决心大量生产这种玩具。魔方发明后不久就风靡世界,人们发现这个小方块组成的玩具实在是奥妙无穷。魔方核心是一个轴,并由二十六个小正方体组成。包括中心方块六个,固定不动,只一面有颜色,边角方块八个(三面有色)(角块)可转动,边缘方块十二个(两面有色)(棱块)亦可转动。玩具在出售时,小立方体的排列使大立方体的每一面都具有相同的颜色。当大立方体的某一面平动旋转时,其相邻的各面单一颜色便被破坏,而组成新图案立方体,再转再变化,形成每一面都由不同颜色的小方块拼成。玩法是将打乱的立方体通过转动尽快恢复成六面呈单一颜色。魔方品种较多,平常说的都是最常见的三阶立方体魔方。其实,也有二阶、四阶、五阶等各种立方体魔方(目前有实物的最高阶为九阶魔方)。还有其他的多面体魔方,魔方的面也可以是其他多边形。如五边形十二面体:五魔方,简称五魔,又称正十二面体魔方。 1正多面体
蚁群算法在车辆路径问题中的应用
三年级科技小制作-正多面体