205t桥式起重机磁盘控制系统改造

20/5t桥式起重机磁盘控制系统改造摘要:磁盘天车在炼钢系统中肩负着炼钢工艺中的废钢装载任务,使用率高。本文就如何数字化无触点电磁盘控制装置可控硅击穿及整流装置过电压保护模块损坏,提出了实质性的预防和改进措施,具有一定的推广和借鉴意义。
关键词:数字化无触点控制装置可控硅击变压器
1 前言
承钢公司炼钢120t系统共三台20/5t磁盘天车(1#,28#,29#),其磁盘控制装置采用MH (美恒)MAGNAMAT BDM 140 220B数字化无触点电磁盘控制装置和MH(美恒)BZ 140A 220V整流装置2套系统控制方式。投产使用2个月以来,三台天车6套装置中,已有2套数字化无触点电磁盘控制装置和3套整流装置出现故障,严重影响了转炉顺产。为了确保转炉生产稳定,采取了有效的预防和根治,取得了理想的使用效果。
2 装置故障原因分析
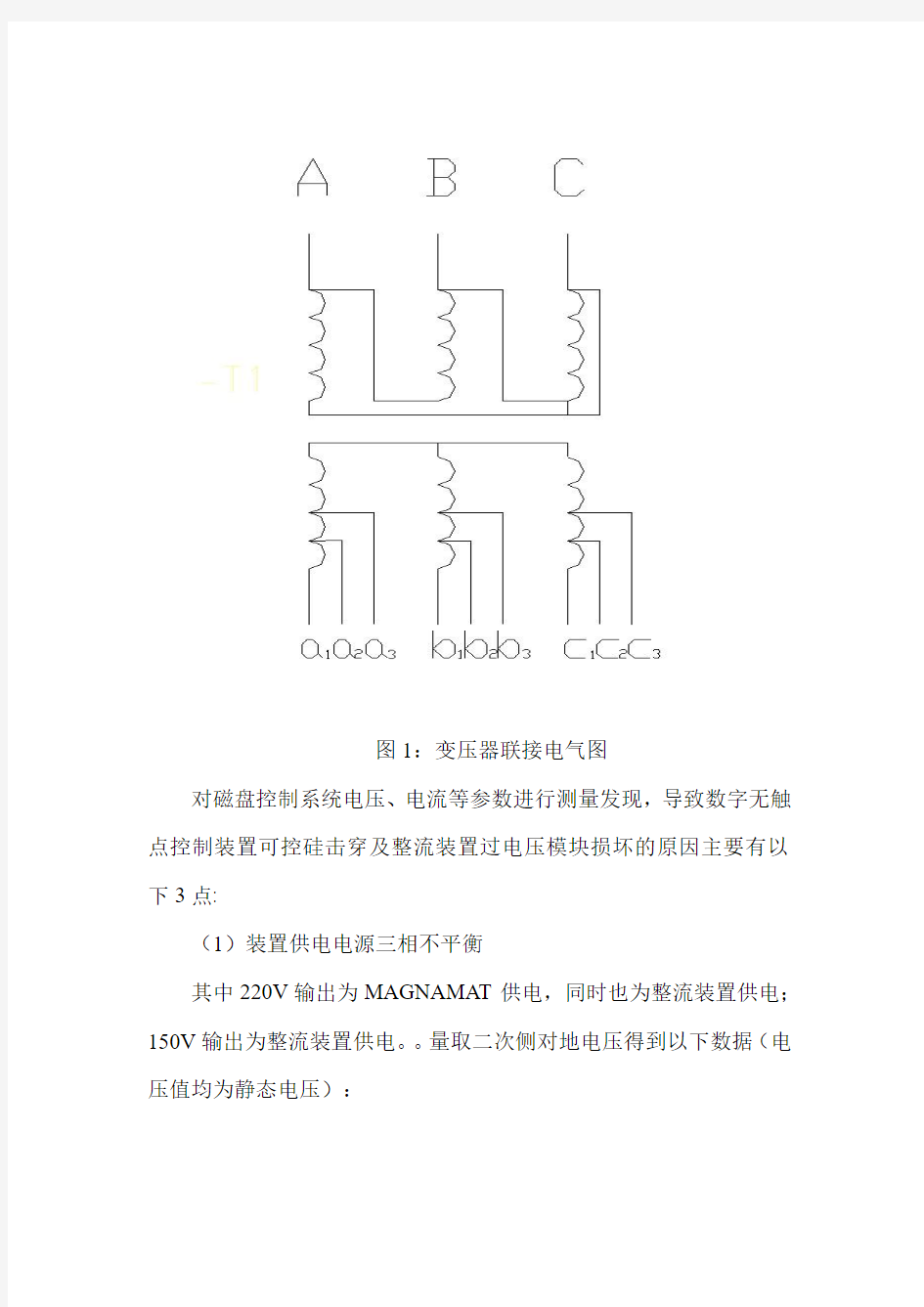
三台磁盘吊(1号,28号,29号)的电磁盘控制装置电源均由每台天车上配备的一台SG 40kva三相隔离变压器提供,该变压器采用△/Y联结,二次侧有三个电压等级,分别a1=220V,a2=176V,a3=150V。如图1所示:
图1:变压器联接电气图
对磁盘控制系统电压、电流等参数进行测量发现,导致数字无触点控制装置可控硅击穿及整流装置过电压模块损坏的原因主要有以下3点:
(1)装置供电电源三相不平衡
其中220V输出为MAGNAMAT供电,同时也为整流装置供电;150V输出为整流装置供电。。量取二次侧对地电压得到以下数据(电
压值均为静态电压):
上表所示三台变压器输出侧均有不同程度的电压不平衡现象,其中1号车最为明显。通过对3台天车的三相隔离变压器检查发现,其二次侧星点均未接地,是导致装置损坏的主要原因之一。
(2)装置进线侧缺乏快速熔断器的保护
由于断路器的断电速度比快熔慢,因此当可控硅有大电流通过的瞬间,快熔对装置的保护优于断路器。这是导致装置可控硅击穿的原因之一。
(3)电磁盘电缆常有瞬间短路情况发生
瞬间短路会在回路里产生瞬间大电流,多数情况下MH装置能够提供保护,但长期频繁处于这种状态,将会对装置产生不可恢复的损坏。
3 预防措施及改进方案
(1)对三相隔离变压器二次侧星点接地处理,避免三相电压不平衡。图2所示。
图2变压器中性点接地电气图。
(2)将三台车装置进线侧的断路器恢复为快速熔断器。
(3)加强设备管理,对磁盘电缆按照使用周期进行更换。
4 结束语
变压器二次侧中性点接地处理及更换快速熔断器后,保障了变压器二次侧三相输出电压稳定,根治了频繁击穿装置可控硅现象。
基于PLC控制的桥式起重机的设计
内容摘要: 本文研讨基于可编程序控制器(PLC)和变频器的桥式起重机控制系统的改进。阐述了交流桥式起重机在实际中的应用以及PLC在改造方案中的确定,亦涉及在改造过程中设备的选型。本文以西门子S7-200系列PLC为例,讲述了PLC 在交流桥式起重机改造中的的控制方案。与传统控制方案相比,采用PLC控制的桥式起重机可以简化繁重的设备,使控制更加安全可靠。从经济效益与环境效益的角度分析,本设计虽然前期投入一部分资金用于购买PLC及变频器等设备,但是长期运行后的维修成本远低于原系统,并且节能可达30%左右。设计中变频器通过PLC进行无触点控制,使设备运行更加准确,并且减轻了人员的劳动强度,提高了工作效率。 关键词:桥式起重机变频器 PLC 控制系统 The Design of PLC-based Bridge Crane System Abstract: This text discussion the improved design of bridge crane control system based on PLC and frequency converter. Introduced the application of Bridge crane, the application of PLC in reconstructive transform and choosing the device. The text takes Siemens S7-200 PLC series as an example, introduced the control project of Bridge crane system. Compared with traditional control scheme,PLC-based Bridge Crane can Simplify the heavy equipment,and make control more safety and reliable. Analysis from economic benefits and environmental benefits,The maintenance cost is far below original system after long-term operation,and Saves about 30% of energy,beside a fond musts put into buying PLC and inverter and other equipment . In this design, Inverter non-contact programmable controller controls the equipment to run more accurate, as well as reduced labor strength, increased efficiency. Key words: bridge crane; frequency converter; PLC; control system
门机控制器调试手册
编号:YETS-0019-C 调试手册 默纳克NICE900门机控制器调试手册 (适用于匹配核奥达门电机) 沈阳博林特电梯集团股份有限公司 SHENYANG BRILLIANT ELEVATOR Co.,Ltd. 2014年10月
目录 1 前言 (2) 2 门机控制器调试 (3) 2.1电气说明 (3) 2.2操作与显示界面 (3) 2.3电机参数自调谐 (4) 2.4门宽自学习 (5) 2.5运行曲线调试 (5) 2.6参数表 (7) 2.7故障诊断及对策 (13) 存档:【资料室】电子存档:【产品管理】发送部门:【按Q/BLT 51.03文件分发部门与份数统计表】 设计 审核 产品管理 标记处数更改单编号签名日期批准
1 前言 本手册所阐述的内容仅提供给博林特电梯有限公司调试、维保人员经培训合格后使用。为了您个人及他人的安全,请勿执行您无资格执行和没有认证的工艺步骤。 本手册包括的所有图纸和信息属沈阳博林特电梯股份有限公司财产,不能任意直接或间接地传播、公开、并损坏沈阳博林特电梯股份有限公司的利益。本手册严禁以任何理由私自复印,若调试人员离开本公司,应及时将资料交还沈阳博林特电梯股份有限公司。 调试人员在调试前应仔细阅读本手册,调试过程严格按照本手册程序执行。在调试过程中应穿着电工绝缘鞋、工作服等防护衣物并应保证在每个现场至少有一套调试工具。 本手册适用于匹配核奥达YTYP504-502门电机的门机系统电气调试,适用于控制柜、曳引机、编码器在出厂时进行了配套调试工作的电梯系统。本手册需要配套《电气安装手册》使用。 电梯安全关系重大,因此要求每位调试人员工作认真仔细,决不放过任何疑点或进行危险操作!在调试过程中发现问题可以及时与电气设计室联系。
盾构机控制系统绿色改造
盾构机控制系统绿色改造 发表时间:2020-01-08T16:41:47.990Z 来源:《科技新时代》2019年11期作者:徐华良秦倩云马俊江[导读] 项目通过WAGO 750IO系统和三菱A800变频器的应用,成功对老旧型号盾构机增加泡沫系统,满足了地铁隧道掘进需求,提高了掘进效率和质量,加速了改造周期,减少了材料成本、增加了企业效益。徐华良秦倩云马俊江 秦皇岛天工重工有限公司 摘要项目通过WAGO 750IO系统和三菱A800变频器的应用,成功对老旧型号盾构机增加泡沫系统,满足了地铁隧道掘进需求,提高了掘进效率和质量,加速了改造周期,减少了材料成本、增加了企业效益。本文详细介绍了运用绿色制造理念,对老旧盾构机的绿色改造过程。 关键词盾构机绿色制造总线控制 1.前言 绿色制造也称为环境意识制造(Environmentally Conscious Manufacturing)、面向环境的制造(Manufacturing For Environment)等,是一个综合考虑环境影响和资源效益的现代化制造模式。其目标是使产品从设计、制造、包装、运输、使用到报废处理的整个产品全寿命周期中,对环境的影响(负作用)最小,资源利用率最高,并使企业经济效益和社会效益协调并优化。 改革开放以来,随着我国经济飞速发展,城镇化进程日益扩大,城市人口增加迅猛,交通压力逐年加大,地铁成为各大城市解决公共交通的优选建设目标。近年来,智慧城市、海绵城市的规划已成为国家战略,地铁、电力管线、给排水隧道投资需求日益增多,我国盾构机产业也从无到有、蓬勃发展起来,如何响应国家青山绿水的基本国策,保护环境,应用绿色制造理念,对大量老旧盾构机进行绿色改造、再利用,成为各企业面临的课题。 2.系统改造需求分析 2.1 原控制系统分析 该盾构机刀盘、盾壳、螺旋机、拼装机、推进、铰接、后配套各台车等整体结构保持较好,机械、液压、电气进行了部分零部件的检修和更换,整机采用FDS总线控制,中心选用施耐德P340高性能CPU,配备4路工业以太网现场总线,使得整个控制系统人机交互、驱动、逻辑、算法从分布式安装到集中控制有机结合,安全、稳定、可靠。 2.2 改造需求和实现 整机需要增加泡沫系统一套,作为主机辅助系统之一,需要采集原主机系统的许多开关量和模拟量信号,并将泡沫参数反馈回主机系统,还要进行人机显示和操控。 最简单实用的办法是泡沫控制系统独立成套,采用PLC、触摸屏和变频及低压系统的方式实现,并增加IO点数和原主机控制系统交互。如此一来,泡沫系统虽然独立成套,能够实现预设功能,但是独立于原主机控制系统,破坏了整个盾构机控制系统的完整性、系统性、统一性,而且操控和检修不便,造成资源浪费和成本提升。我们分析了原控制系统的硬件、网络、软件配置,依据绿色制造理念,在原系统中增加一个工业以太网现场总线的IO站点,实现泡沫系统的集中控制、现场分布式安装,完美契合整个盾构控制系统的一致性,可靠解决了泡沫子系统和主机系统的数据交换,并使用原系统的上位工控机实现人机交互,大大减少了企业生产成本,符合国家绿色制造政策。系统控制原理和网络结构如图1所示。 图1 控制网络结构图 3.控制系统的硬件设计 3.1 IO站点选型 德国WAGO公司的远程IO系列产品,网络模式多、IO规格齐全、抗干扰性强,行业内应用广泛。本次改造选用原机采用的750系列模块化产品,延续了整机控制系统的一致性,搭配灵活可靠、占用空间小、系统稳定可靠。具体配置如下:以太网模块 750-352 1台 开关量输入模块 750-1415 2台 开关量输出模块 750-1515 1台 模拟量输入模块 750-455 5台 模拟量输出模块 750-555 4台 3.2 变频器选型选型 本机增加泡沫系统,原液泵1台,混合液泵4台,调速范围宽,拟采用三菱A800系列变频器,该系列变频器调速精度高、操控简易、成本低,而且体积小,易于安装和集成。 2.2KW变频器 FR-840-00083 4台
门座式起重机旋转制动控制系统的改造
门座式起重机旋转制动控制系统的改造 发表时间:2018-05-14T10:03:18.647Z 来源:《电力设备》2017年第35期作者:徐莉莎 [导读] 摘要:在装卸作业中,往往要求门座式起重机能够精确地调整货物的横向摆放位置,因此,门机的旋转机构需要频繁地进行启动和制动,而这对门机本身的钢结构产生较大的冲击,本文将采用合理的旋转制动系统的控制方式,以此降低门机在旋转启停时产生的冲击载荷。 (天津港汇盛码头有限公司天津 300456) 摘要:在装卸作业中,往往要求门座式起重机能够精确地调整货物的横向摆放位置,因此,门机的旋转机构需要频繁地进行启动和制动,而这对门机本身的钢结构产生较大的冲击,本文将采用合理的旋转制动系统的控制方式,以此降低门机在旋转启停时产生的冲击载荷。 关键词:门座式起重机;旋转制动控制系统 1基本情况 在装卸作业中,往往要求门座式起重机能够精确地调整货物的横向摆放位置,因此,门机的旋转机构需要频繁地进行启动和制动,特别是当需要将货物精确整齐地摆放在某个特定的位置时旋转制动系统需要在短时间内进行多次的启动和停止动作,所以无论是空载还是重载状态,都会对门机本身的钢结构产生较大的冲击,所以采用合理的旋转制动系统的控制方式对有效降低门机在旋转启停时产生的冲击载荷方面具有非常重要的意义。 目前,我公司门座式起重机采用的是脚踏变频液力控制系统,其工作原理也是门机在收到旋转运行指令前先运行液力推动器,将制动闸瓦打开,旋转运行指令结束后,若无继续运行的指令,系统一般会在指令结束的2-3秒内切断液力推动器的运行,若需要人为控制旋转动作的滑行,则需要司机踩下旋转制动脚踏开关。但是此时制动闸瓦不会立即抱死制动轮,而是会根据司机踩踏脚踏的力度去控制液力推杆的输出力矩,随着司机踩踏力度的增加,液力推杆的输出力矩会随之降低,闸瓦与制动轮之间的摩擦力会逐渐增大,此时,旋转动作时处于制动状态,但是不会立即停止,是一种处于减速滑行的状态。当脚踏完全踩到底时,则制动闸瓦会将制动轮立即抱死。 2存在的困难问题 采用变频液力控制系统除了模拟信号发生器即脚踏控制开关,还需要一套变频控制柜,控制柜内部主要包括变频器、交流变压器、直流开关电源、常规继电器、延时继电器、断路器、模拟信号接收器、主回路端子、控制回路端子,等一系列电气元件,这其中直流变压器、模拟信号接收和转换器均为易损元件,特别是模拟信号发生器和接收器发生故障的频率较高,备件价值更高且现场维修的难度很大。 在实际使用过程中,旋转制动系统仍然故障频发,造成的后果是: (1)维修故障停机台时增加,设备在线故障率较高; (2)维修更换零件费用较大; (3)电气故障出现时,极易造成设备旋转过程中出现误动作,突然停机或停不住,极为危险。 所以当这种控制系统在使用过程中发生故障一般都会直接影响码头船舶的装卸作业,有时还会因此需要推迟船舶的离港动态。 3思路与对策 原先的控制系统虽然使用模拟量发生、接收装置,但是在实际的驱动过程中,FPPA脚踏将模拟信号传送给模拟-数字变换器输出三位数字信号,实现变频器多段速控制,仍然是使用变频器的多段速控制,通过制动电机转速变化,改变油压实现制动力改变即使用的档位控制而不是模拟量的连续输出,针对这种情况,我们选择了一种能够满足三个档位控制信号输入的脚踏开关,其结构和功能均类似我们常见的主令控制器,然后将FPPA脚踏改造成三位数字量开关脚踏,可直接用220V交流电源输出开关量信号,从而实现了变频器对液力推杆油泵电机的段速控制。 (1)对原有的脚踏控制器,进行仔细的的拆解。以了解原装置的具体的功能和其存在的缺陷。 (2)经过研讨和论证,提出改进的思路。包括:选择能实现三挡数字量控制信号输出的脚踏控制器、拆除原先的模拟信号-数字量转换控制板、拆除直流电源、直流微动继电器组件,并对原先的控制电路进行相应的简化和调整。
桥式起重机的PLC控制-(1)
桥式起重机的PLC控制-(1)
桥式起重机作为物料搬运系统中一种典型设备,在企业生产活动中应用广泛。传统的桥式起重控制系统主要采用继电器接触器进行控制,采用交流绕线串电阻的方法进行启动和调速,这种控制系统存在可靠性差,操作复杂,故障率高,电能浪费大,效率低等缺点。因此对桥式起重机控制系统进行研究具有现实意义,也是国内外相关行业专家学者的一个研究课题。 本文针对桥式起重机控制系统中存在的上述问题,把可编程序控制器和变频器应用于桥式起重机控制系统上,并进行了较深入的研究。 1.根据桥式起重机的运行特点,桥式起重机控制系统采用变频调速系统,该系统主要由主令控制器、PLC控制系统、变频调速系统等组成。 2.PLC系统采用德国西门子公司产品,能控制起重机大车、小车的运行方向和速度换档;吊钩的升、降方向及速度换档,同时能检测各个电机故障现象并显示,减小了传统继电器——接触器控制系统的中间环节。减少了硬件和控制线,极大提高了系统的稳定性,可靠性。 本设计控制系统采用桥式起重机变频调速技术具有节能、减少机械磨损,启动性能好等诸多优点。 关键词:主令控制器;可编程序控制器;桥式起重机
引言 (5) 1 桥式起重机的概述 (6) 1.1 桥式起重机的简介 (6) 1.2 桥式起重机的各机构及其作用 (7) 1.3 桥式起重机的发展现状 (7) 2 桥式起重机控制系统的设计方案 (9) 2.1 工艺要求 (9) 2.1.1 桥式起重机的主要技术参数 (9) 2.1.2 提升机构与移动机构对电气控制的要求 (9) 2.2 方案论证 (10) 2.2.1 起重机数字化控制系统的方案简述 (10) 2.2.2 主电路方案选择 (10) 2.2.3 变频调速工作原理及变频器控制方式 (12) 2.2.4 控制电路方案选择(PLC控制和继电器控制的比较) 17 3 系统设备的选用 (20) 3.1 电机的选择 (20) 3.2 变频器的选择 (22) 3.2.1 通用变频器的标准规格 (22) 3.2.2 通用变频器类型的选择 (23) 3.2.3 变频器的选型 (26) 3.3 PLC的选择 (27) 3.3.1 PLC的组成 (27) 3.3.2 PLC的工作原理 (28) 3.3.3 PLC的硬件和软件 (28) 3.3.4 PLC型号的选用 (30) 3.4 变频器的外部设备及其选择 (32)
VVVF门机控制器操作说明
V V V F门机控制器操作说明 Prepared on 24 November 2020
VVVF门机控制器操作说明 VVVF门机控制器——操作说明书 注:H100版以后(包括H100版)的门机变频器、面板控制模式和端子控制模式的设定是由变频器壳体上手动/自动开关来设定,开关放到手动即为面板控制模式;开关放到自动即为端子控制模式。F11对于H100版以后的门机变频器不起作用,对于H100版以前仍然为0 —面板控制模式; 2 —端子控制模式。 1. 安装工作程序 1.1 安装注意事项 1. 1. 1 控制器设计安装于轿顶。操作及安装时应小心,尤其不能有金属、水、油或其它异物进入门机控制 1.1.2 不要将门机控制器安装于易燃材料上。 1.1.3在轿顶安装门机控制器时,一方面要保证面板能被良好的观察,另一方面要保证门机控制器的清洁。 1.1.4 在进行接线工作前,必须确保门机控制器电源至少已切断两分钟。否则会存在电击或放电危险。 1.1.5门机控制器的接线必须由有专业资格的人员来完成。
1.1.6检查安全开关电路是否断开(急停)。 1.1.7 确保所有的电气部件都正确接地。 1.1.8 确认门机控制器有正确的电源电压。 1.1.9反复确认装置接线正确。 1.2 使用注意事项 1.2.1 在布线过程中始终注意信号及控制线(弱电)与交流电源线、电机线(强电)之间保持一定距离,不要混在一起,避免造成干扰。 1.2.2 在轿厢启动前,控制系统必须给出关门指令,并且在轿厢运行过程中始终给出关门指令,避免门锁断开造成中途停车。 1.2.3 HdXX或HXXX(Hd4、H100等为软件版本号)为软件版本标志,“20. 00”—为可读入脉冲数,如遇软件版本升级,恕不再另行通知。 1.2.4 对于开关门控制信号输入必须使用无源触点,避免造成门机变频器损坏或工作不正常。 1.2.5 在使用前必须仔细阅读本说明书。 2.产品介绍 2.1 工作环境 2.1.1 使用在无尘埃、腐蚀性气体、可燃性气体、油雾、水蒸气的环境中。
PLC与变频器在桥式起重机控制系统改造中的应用(1)(1)
目录 一、问题的提出。。。。。。。。。。。。。。。。。。。。。。。 -1 二、起重机的工作原理。。。。。。。。。。。。。。。。。。。。 -2 三、起重机电气控制系统硬件设计。。。。。。。。。。。。。。。 -3 3.1 PLC控制系统……………………………………………………… -4 3.2变频调速系统……………………………………………………… -8 3.3触摸屏系统……………………………………………………….. -14 四、起重机电气控制系统软件设计。。。。。。。。。。。。。。。 -15 五、改造前后技术对比。。。。。。。。。。。。。。。。。。。。 -16 六、结束语。。。。。。。。。。。。。。。。。。。。。。。。。 -17
PLC与变频器在桥式起重机控制系统 设计中的应用 摘要:针对100/20t桥式起重机原控制系统在启动和调速等方面存在的问题,本文采用PLC、变频器及触摸屏控制技术对其电气控制系统的硬件结构和软件进行总体优化设计。实践表明,改造后的系统有效克服了起重机存在的缺陷,运行可靠,具有良好的工业应用前景。 关键词:可编程控制器;变频器;触摸屏;桥式起重机;优化设计 随着电力电子技术、微电子技术和计算机技术的迅猛发展,PLC控制技术和变频调速技术以其可靠性高、运行平稳、控制过程软件化、功能强、灵活性大等特点,已广泛应用于电气传动领域。本研究以桥式起重机的变频调速和以PLC为核心的控制系统设计为例,说明PLC控制系统和变频调速所具备的优越性。 一、问题的提出 马钢某钢厂一100/20t桥式起重机,主要用于吊钢包、吊废钢、加料等。该起重机主要采用交流绕线转子串电阻方法进行启动与调速,继电接触器控制。由于载荷利用率高,工况恶劣,而且重载下频繁起动、制动、反转、变速等操作,实际使用中存在如下问题:(1)调速方式只能进行有级调速;(2)起动/制动冲击电流大,对电动机的电刷、滑环及制动器有比较大的冲击,维修率高;(3)串电阻长期发热,电能浪费大,效率低; (4)接触器控制系统可靠性差,操作复杂,故障率高等,极大影响了该厂的效益。 本文针对该系统的不足,将可编程序控制器、变频器和触摸屏控制技术应用于桥式起重控制系统中,使得起重机的整体特性得到较大提高,投入运行后效果良好,运行稳定。
控制系统改造标书样本
控制系统改造标书样本 The following text is amended on 12 November 2020.
某某公司招标书年月日
第一章投标邀请 1.某某公司, 就某某车间控制系统改造,请有意投标的投标人按 要求提交密封投 标。 2.有意向的投标人可以从某某公司采购部得到进一步的信息和查阅招标文件。 3.有意向的投标人可从年月日起每天(星期日除外)8:00时至12:00时、13:00时至17:00时到某某公司采购部索取招标文件,本招标文件无收费项目。 4.所有投标书应于年月日9时(北京时间)之前交到某某公司采购部,晚于此时间递送的招标文件视为无效。 5.定于年月日9时(北京时间),在某某公司采购部某某会议室公开开标。届时请参加投标的代表出席开标仪式。 招标单位: 详细地址: 联系人:联系方法:
第二章投标资料表 一、说明 1.业主(需方)名称: 2.业主(需方)地址、电话、传真号: 电话:传真: 3.投标语言:中文。 二、投标报价和货币 1.投标报价:含税(标明税率)。 2.投标货币:人民币。 3.如果有合理替代方案引起价格变动时,应加以说明。除此之外,招标方不接受任何选择报价,对每一种货物只允许有一个报价。 4. 最低报价不能作为中标的保证。 三、投标书的编制和递交 1.资格标准: 1-1凡具有法人资格的国内一般纳税人企事业单位均可参加投标; 1-2投标方应遵守有关的国家法律、法令和条例。 2.投标委托:如果投标方代表不是法人代表,须持有《法人代表授权书》(统一格式)。 3.投标书份数:正本一份、副本三份。 4.投标文件的组成:
汽轮机控制系统
汽轮机控制系统 包括汽轮机的调节系统、监测保护系统、自动起停和功率给定控制系统。控制系统的内容和复杂程度依机组的用途和容量大小而不同。各种控制功能都是通过信号的测量、综合和放大,最后由执行机构操纵主汽阀和调节阀来完成的。现代汽轮机的测量、综合和放大元件有机械式、液压式、电气式和电子式等多种,执行机构则都采用液压式。 调节系统用来保证机组具有高品质的输出,以满足使用的要求。常用的有转速调节、压力调节和流量调节3种。①转速调节:任何用途的汽轮机对工作转速都有一定的要求,所以都装有调速器。早期使用的是机械式飞锤式离心调速器,它借助于重锤绕轴旋转产生的离心力使弹簧变形而把转速信号转换成位移。这种调速器工作转速范围窄,而且需要通过减速装置传动,但工作可靠。20世纪50年代初出现了由主轴直接传动的机械式高速离心调速器,由重锤产生的离心力使钢带受力变形而形成位移输出。图 1 [液压式调速 器]为两种常用的液压式调速器的
工作原理图[液压式调速器],汽轮机转子直接带动信号泵(图1a[液压式调速 器])或旋转阻尼(图1b[液压式调速
器]),泵或旋转阻尼出口的油压正比于转速的平方,油压作用于转换器的活塞或波纹管而形成位移输出。②压力调节:用于供热式汽轮机。常用的是波纹管调压器(图 2 [波纹管调压 器])。调节压力时作为信号的压力作用于波纹管,使之与弹簧一起受压变形而形成位移输出。③流量调节:用于驱动高炉鼓风机等流体机械的变速汽轮机。流量信号通常用孔板两侧的压力差(1-2)来测得。图3 [压
差调节器]是流量调节常用压差调节器波纹管与弹簧一起受压变形而将压力差信号转换成位移输出。 汽轮机除极小功率者外都采用间接调节,即调节器的输出经由油动机(即滑阀与油缸)放大后去推动调节阀。通常采用的是机械式(采用机械和液压元件)调节系统。而电液式(液压元件与电气、电子器件混用)调节系统则用于要求较高的多变量复合系统和自动化水平高、调节品质严的现代大型汽轮机。70年代以前,不论机械式或电液式调节系统,所用信息全是模拟量;后来不少机组开始使用数字量信息,采用数字式电液调节系统。 汽轮机调节系统是一种反馈控制系统,是按自动控制理论进行系统动态分析和设计的。发电用汽轮机的调节工业和居民用电都要求频率恒定,因此发电用汽轮机的调节任务是使汽轮机在任何运行工况下保持转速基本不变。在图 4 [机械式调速系
起重机改(非PLC)装遥控器方案
TYdq2011-8-19 起重机电气改造 技术方案 建设单位意见: 批准: 审核: 编制:许敏 施工单位: 2011-8-10
一、工程概况 贵公司委托我单位对10t等几台起重设备进行控制系统改造,针对不同的起重设备、不同的功能情况,在不改变起重机原有功能的前提下,进行增装遥控器,将起重机的所有功能在遥控上实现,并做到两个系统随意切换,做到起重机控制的灵活性、安全性、高效性。本次电气系统改造为“遥控器+继电器+逻辑控制”的方式。对整车电气系统重新进行设计,遥控器及低压组件选型将根据起重机的工况特点重新进行计算、选型,质量可靠、耐用,并且电气设备故障率低。使改造后的设备,无论从性能上、还是从技术含量上,都达到国内先进水平。非变频控制形式的起重机,改造方式同样,只需将遥控器+中间继电器+控制屏。 二、技术规范、标准 1.本工程遵照执行的现行技术规范和标准有 GB3811-83《起重机设计规范》 GB6067-85《起重机机械安全规程》 GB5905-86《起重机试验规范和程序》
GB/T14407《通用桥式和门式起重机司机室技术条件》 GB1497-85《低压电器基本标准》 GB50278-98《起重机设备安装工程施工及验收规范》 JB/T4315-97《起重机电控设备》 GBJ 232—82《电气装置安装工程施工及验收规范》 JB/ZQ2007-90《起重机电气制图》 本系统在设计、改造、检验、出厂试验和现场安装中,我们除按上述标准执行外。甲方提出的技术要求,如果在执行过程中有新的技术标准和要求,则按最新颁布的技术标准和要求执行。 三、质量、工期、安全 3.1质量目标:合格。 3.2工期目标:保证业主要求的工期天 3.3安全目标:一般事故频率控制在0.01%以下,杜绝重伤、重大事故。 4.现场组织机构是根据本工程特点和工程施工总体指导思想,我公司将成立由主要领导和有关部室主要负责人组成的工程领导小组,任命具有丰富技术管理经验的我公司主要技术负责人作为本工程的总工程师。 四、原有控制系统情况分析 1:采用控制器及线控操作方式:由于控制线所限,行车在吊运物体走动时操作员必须跟随物体的左右或物体下面来实现控制行车的走
双梁桥式起重机基本知识汇总
双梁起重机培训材料 操作者必须严格遵守安全技术操作规程,并对自己所操纵的起重 机做到全面了解其性能、结构、工作原理,并熟练掌握其操作方法和技巧。要严格按照交接班程序对设备进行检查、保养和记录,发现问题要及时反馈维修部门通知维修。 空操双梁起重机操作司机应具备以下要求:1.操作者必须身体健康,年满18 周岁,视力(包括矫正视力)在 1.0 以上,无色盲症,听力能满足具体工作条件的要求。 2.操作者应能熟悉安全操作规程和掌握有关安全注意事项。 3.操作者应熟悉空操双梁起重机的基本结构和性能。 4.操作者应熟悉双梁起重机安全装置的作用,掌握相应的吊装作业知识。 5. 司机须持有特殊工种操作证,严禁非驾驶人员操作。 6. 所有司机须参加设备办特种作业考试培训,经设备办考核备案并通过的方可独立操作。 第一部分:双梁桥式起重机基本知识 .组成:桥式起重机一般由机械、电气和金属结构三大部分组成。桥式起重机外形象一个两端支承在平行的两条架空轨道上平移运行的单跨平板桥。 机械部分:分为三个机构即起升机构、小车运行机构和大车运行机1、 构。起升机构是用来垂直升降物品,小车运行机构是用来带着
载荷作横向移动;大车运行机构用来将起重小车和物品作纵向移动, 以达到三维空间里做搬运和装卸货物用。 2、金属结构部分:由桥架和小车架组成。 3、电气部分:由电气设备和电气线路组成 二.主要技术性能参数: 起重量、起升高度、下放深度、跨度、机构工作速度、工作 级别、及起重机总重或轮压。 1、起重量:起重机正常工作时允许最大起吊重量。 2、起升高度:吊具的上极限位置与下极限位置之间的距离。 3、跨度:起重机两端车轮垂直中心线间的距离 4、机构工作速度(第 5 档速度) 1)起升速度:是指起升机构电动机在额定转速时,取物装置满载起升的速度。 2)大车运行速度:是指大车运行机构电动机在额定转速时,起重机的运行速度。 3)小车运行速度:是指小车运行机构电动机在额定转速时,起重小车的运行速度。 5、工作级别:表示起重机起吊载荷的满载程度和起吊工作次数多少的繁忙程度的整机工作状况指标,起重机的工作级别分为A1-A8 共8 个级别,轻级(A1-A3 )、中级(A4、A5 )、重级(A 6、A7)特重级 A8)。 6、轮压:桥架自重和小车处在极限位置时小车自重和额定起重量作 用在大车车轮上的最大垂直压力。 三构造:1、桥架:由两根主梁和两根端梁及走台和护栏等零部件组成的。其结构形式有两种:箱形的和桁架的。 2、大车运行机构:由电动机、制动器、减速器、联轴器、传动轴、角型轴承箱、车轮等零部件组成。
VVVF门机控制器
展鹏数字式VVVF同步带门机和挂件安装调试说明(部分) (2009-04-15 16:00:20) 数字式VVVF同步带门机和挂件安装调试说明 2 面板说明 2.1 双位七段码显示 2.1.1 正常工作状态下显示门位置的脉冲 位置脉冲用双位十进制显示:门完全闭合位置(门刀已完全放开)显示为00,门完全开足位置显示为99,其它位置按比例显示。 2.1.2 修改参数时,参数类别号以双位十六进制显示;参数值用双位十进制显示,当前位闪烁显示。 2.1.3 参数值设置报警以双位闪烁方式显示,十位闪烁显示出错的参数类别(U、 H、P),个位闪烁显示“-” 。 2.1.4 故障显示,十位闪烁显示“-”,个位闪烁显示故障代码(1-8)。 2.1.5 面板显示优先级:参数设置>参数值设置故障>门机故障>正常显示。 2.2 键盘分布 ①③ ②④ 左上①键-----∧键,向上翻转参数号/参数值增1/面板开门; 左下②键-----∨键,向下翻转参数号/参数值减1/面板关门; 右上③键-----F键,进入参数设置/光标移位/退出参数设置/中止 开关门; 右下④键-----Enter键,进入参数修改/确认修改值。 2.3 在设定A1=01/A1=02时,可按∧键开门或∨键关门 在A1=02时,按∧键/∨键可使正在开/关门中的门机反向关门或开门; 在A1=02/A1=03/自学习开关门时,可用F键中止本次开关门运行。 2.4 在非开关门状态下,按F键从正常显示脉冲进入参数设定状态。
2.5 首先面板显示参数号A1,这时可按∧或∨键往上或往下翻转,可持续按住∧或∨键快速翻转,找到要修改的参数号。 2.6 按Enter键进入参数修改状态,显示变为当前参数的参数值,这时可按∧或∨键修改参数值,可持续按住∧或∨键快速增减;也可按F键(在参数修改状态时转义为移位键)使光标从个位移至十位或从十位移到个位,然后修改参数值,改完后按Enter键确认,系统会自动转至下一个参数号。 2.7 全部参数设定完成后,在显示参数号状态时按F键退出,进入正常运行状态。 3.1.1 面板点动开关门(A1=01) 当A1=01时,持续按住∧键或∨键才能保持开关门,释放按键开关门即停止 当未进行过自学习时,只有面板点动功能方可进行开关门运行。但该功能不可进行上电自整定(后有详述)。 3.1.2 面板手动开关门(A1=02) 当A1=02时,且门机已自学习过,按一下∧或∨键,会持续开门或关门直至到位,本次开关门过程可用F键中止。 3.1.3 自动定时开关门(A1=03/04,门机演示功能) 当A1=03,门机会自动定时开关门,定时间隔时间由A6设定,本次开关门运行可用F键中止。这时可直接接入门保护装置:如红外光幕或安全触板。 3.2 联机状态 开关门运行需要电梯控制柜控制时的状态(即设置A1=00,端子控制状态)。 联机状态时,位置脉冲显示以双位正常形式显示,不再闪烁。 3.3 注意 当用户调试或维护门机结束、准备交付正常使用前,请注意面板显示方式,须转至联机状态(不闪烁),电梯的自动开关门方可正常。 4 电气调试 4.1 准备工作 按电气接线图正确接线,插紧各接插件。把电梯开至平层位置带上厅门(以下同),先拨下门机控制器上外接电源,用手来回盘动门机,确认无任何呆滞后插上门机电源,这时可以调试门机。 4.2 该门机系统出厂前已经过调试,连接好外接线路即能正常运行,如需重新调试按以下步骤进行。 4.3 置L1=01,取出厂值。 4.4 确认开、关门的方向 断开门机电源,将门盘至半开半关,通电并置A1=01,按住∧键,应向开门方
起重机的电气控制系统
起重机的电气控制系统 起重机钢结构负责载荷支承;起重机机构负责动作运转;起重机机构动作的起动、运转、换向和停止等均由电气或液压控制系统来完成,为了起重机运转动作能平稳、准确、安全可靠是离不开电气有效的传动、控制与保护。 1.起重机电气传动 起重机对电气传动的要求有:调速、平稳或快速起制动、纠偏、保持同步、机构间的动作协调、吊重止摆等。其中调速常作为重要要求。 一般起重机的调速性能是较差的,当需要准确停车时,司机只能采取“点车”的操纵方法,如果“点车”次数很多,不但增加了司机的劳动强度,而且由于电器接电次数和电动机起动次数增加,而使电器、电动机工作年限大为缩短,事故增多,维修量增大。 有的起重机对准确停车要求较高,必须实行调速才能满足停准要求。有的起重机要采用程序控制、数控、遥控等,这些技术的应用,往往必须在实现了调速要求后,才有可能。 由于起重机调速绝大多数需在运行过程中进行,而且变化次数较多,故机械变速一般不太 合适,大多数需采用电气调速。电气调速分为二大类:直流调速和交流调速。 直流调速有以下三种方案:固定电压供电的直流串激电动机,改变外串电阻和接法的直流调速;可控电压供电的直流发电机———电动机的直流调速;可控电压供电的晶闸管供电———直流电动机系统的直流调速。直流调速具有过载能力大、调速比大、起制动性能好、适合频繁的起制动、事故率低等优点。缺点是系统结构复杂、价格昂贵、需要直流电源等。 交流调速分为三大类:变频、变极、变转差率。 调频调速技术目前已大量地应用到起重机的无级调速作业当中,电子变压变频调速系统的主体———变频器已有系列产品供货。 变极调速目前主要应用在葫芦式起重机的鼠笼型双绕组变极电动机上,采用改变电机极对数来实现调速。 变转差率调速方式较多,如改变绕线异步电动机外串电阻法、转子晶闸管脉冲调速法等。除了上述调速以外还有双电机调速、液力推动器调速、动力制动调速、转子脉冲调速、蜗流制动器调速、定子调压调速等等。 2.起重机的自动控制 可编程序控制器———程序控制装置一般由电子数字控制系统组成,其程序自动控制功能主要由可编程序控制器来实现。 自动定位装置———起重机的自动定位一般是根据被控对象的使用环境、精度要求来确定装置的结构形式。自动定位装置通常使用各种检测元件与继电接触器或可编程序控制器,相互配合达到自动定位的目的。 大车运行机构的纠偏和电气同步———纠偏分为人为纠偏和自动纠偏。人为纠偏是当偏斜超过一定值后,偏斜信号发生器发出信号,司机断开超前支腿侧的电机,接通滞后支腿侧的电机进行调整。自动纠偏是当偏斜超过一定值时,纠偏指令发生器发出指令,系统进行自动纠偏。电气同步是在交流传动中,常采用带有均衡电机的电轴系统,实现电气同步。 地面操纵、有线与无线遥控———地面操纵多为葫芦式起重机采用,其关键部件是手动按钮开关,即通常所称的手电门。有线遥控是通过专用的电缆或动力线作为载波体,对信号用调制解调传输方式,达到只用少通道即可实现控制的方法。无线遥控是利用当代电子技术,将信息以电波或光波为通道形式传输达到控制的目的。 起重电磁铁及其控制———起重电磁铁的电路,主要是提供电磁铁的直流电源及完成控制(吸料、放料)要求。其工作方式分为:定电压控制方式和可调电压控制方式。 3.起重机的电源引入装置 起重机的电源引入装置分为三类:硬滑线供电、软电缆供电和滑环集电器。 硬滑线电源引入装置有裸角钢平面集电器、圆钢(或铜)滑轮集电器和内藏式滑触线集电 器进行电源引入。 软电缆供电的电源引入装置是采用带有绝缘护套的多芯软电线制成的,软电缆有圆电缆和扁电缆二种形式,它们通过吊挂的供电跑车进行引入电源。 4.起重机的电气设备与电气回路
申菱新门机控制器调试说明书
目录 1.概要 (2) 2.注意事项 (2) 3.端子功能 (2) 4.按键名称和基本操作 (3) 5.接线图 (4) 6.开关门曲线说明 (5) 7.基本调试1 (7) 8.基本调试2 (7) 9.功能参数表 (9) 10. 监控和故障显示 (12) 11.与MPK708/808/货梯BLT V-N接线对照 (14)
1、概要 为适应宁波申菱新推出NSFC01-01型门机控制器的使用要求,编写本调试说明书。NSFC01-01型门机控制器是结合门机的机械结构和门机用户控制功能的特点,委托松下电工开发的新一代门机专用型变频调速系统。它通过编码器反馈的信息进行闭环控制,具有优良的调速特性,启动力矩大,动态响应快,齐全的专用保护和状态监视功能,并具有调试简单、运行平稳可靠、噪音低等特点。 2、注意事项 1 必须由具有专业资格的人员才能对控制器进行调试、维修或检查。 2 确认输入电源处于完全断开的情况下,才能进行配线作业。 3 不要把输入端子(L,N)与输出端子(U,V,W) 混淆,否则会损坏控制器。 4 将控制器的接线地端子可靠接地,否则有触电危险。 5 通电情况下,不要用手触摸控制端子,否则有触电危险。 6 在充电指示灯彻底熄灭或正负母线电压在36V以下时进行 否则有触电的危险。 7 防止螺钉,垫片及金属之类的异物掉进变频器内部 否则有火灾及损坏财务的危险。 8 主回路接线用电缆端头的裸露部分,一定要用绝缘胶带包扎好 否则有损坏财物的危险。
3、端子功能 注: --*为控制器内部接线不在6芯控制电缆线内 4、按键名称和基本操作 4、1 按键名称
4、2 按键基本操作 以改变参数P05为22为例: 按键次序 显示内容 注:参数d 在参数p 之后。在切换到参数p 后,
数控车床电气控制系统改造
齐齐哈尔工程学院 论文 题目:数控车床电气控制系统改造 专业:机械设计制造及其自动化 学号: 2013030233 学生:王鑫 指导教师:陈龙 起止日期: 2016.11.21-12.30
目录 目录 摘要 (3) 引言 (4) 一、概述 (5) 1.1 选题的目的和意义 (5) 1.2 关于课题的一些介绍和讨论 (5) 1.3 电气控制技术的发展 (6) 1.4 PLC的发展史及特点 (4) 二、镗床的概况 (9) 2.1 T6113卧式镗床主要结构及机械运动 (9) 2.2 电气控制 (10) 2.2.1 卧式镗床电力拖动及控制要求 (10) 2.2.2 T6113卧式镗床的电气控制 (10) 三、镗床电力拖动电动机的选择 (13) 3.1 概述 (13) 3.2 镗床用电动机容量的选择 (13) 3.2.1 镗床主运动电动机容量的选择 (13) 3.2.2 快速移动电动机容量的选择 (13) 3.2.3 后立柱电机容量的选择 (13) 3.2.4 主轴箱和工作台油泵电动机容量的选择 (13) 四 PLC控制系统的设计 (14) 4.1 PLC控制系统设计的内容和步骤 (14) 4.1.1 PLC控制系统设计的内容 (14) 4.1.2 PLC控制系统设计的步骤 (14) 4.2 PLC控制系统的硬件配置 (14) 4.2.1选择PLC机型 (14) 4.2.2开关量I/O模块的选择 (14) 4.2.3 PLC的接线电路分析 (14) 五、 PLC在T113卧式镗床中的应用 (16) 5.1 T6113卧式镗床的PLC控制方案 (16) 5.2 T6113控制系统设计 (16) 5.2.1 机型的选择及I/O接口的分配 (16) 5.2.2 程序编制 (16) 结论 (20) 参考文献 (21)
单梁起重机变频改造方案
电动单梁起重机 电控系统 改 造 方 案 单位:纽科伦(新乡)起重机有限公司
目录 1 综述 总则 适用标准 变频控制的优点 电气系统主数据 2 变频调速的主要优势 变频调速的主要效益表现 变频调速的主要特点 3 改造方案 4系统改造计算 5 低压开关柜 6 工程设计和资料 7 电气安装和施工 8 调试 9 项目管理 10 技术联络
1 综述 本技术规格书描述了电动单梁起重机改造变频系统调试的内容及范围。 总则 电动单梁起重机原控制系统为地面接触器控制,现应用户要求改造为遥控变频控制。 适用标准 IEC, DIN, VDE 主要参数 起升速度m/min 小车运行速度2-20m/min 大车机构运行速度2-20 m/mi 电气系统主数据 供电380V 50Hz, 三相四线 主机构交流电机380 V 低压控制系统36 V, 50 Hz 2 变频调速主要优点 变频调速主要变现: 节能;提高生产效率;调速;提高产品性能;提高生产线的自动化和改善使用环境等方面。 变频调速主要特点: 控制电机的启动电流,增加电机和减速机使用寿命。 降低电力线路电压波动,保护电网。 启动时需要的功率更低,达到节能减耗效果。 可控的加速功能,使起重机可缓慢加速,起重机运行平稳,减少机械磨损。 可调的运行速度,使用起来更方便。 可调的转矩极限,保护机械不损坏。 受控的停止方式,使停止更平稳。 节能,能节能20%。 可逆运行控制,能简化线路,降低改造率。 3 改造方案
葫芦运行机构: 2-3T葫芦运行电机为ZDY12-4/,电压为380V,电流,选用西门子变频器,型号为6SL32240CA211UA0;或ABB变频器,型号为ACS550-01-03A3-4;依据现场情况选配进线电抗器。制动电阻阻值为210欧,功率为。 5T葫芦运行电机为ZDY21-4/,电压为380V,电流, 选用西门子变频器,型号为6SL32240CA211UA0;或ABB变频器型号为ACS550-01-05A3-4;依据现场情况选配进线电抗器。制动电阻阻值为210欧,功率为。 葫芦起升机构: 2T葫芦起升电机为ZD31-4/3KW,电压为380V,电流, 选用西门子变频器,型号为6SL32240CG255UA0;或ABB变频器型号 ACS850-04-010A-5+J400+N3050+N5050;依据现场情况选配进线电抗器。制动电阻阻值为80欧,功率为2KW. 3T葫芦运行电机为ZD32-4/,电压为380V,电流11A, 选用西门子变频器,型号为6SL32240CG275UA0;或ABB变频器型号 ACS850-04-018A-5+J400+N3050+N5050;依据现场情况选配进线电抗器。制动电阻阻值为40欧,功率为3KW. 5T葫芦运行电机为ZD41-4/,电压为380V,电流18A, 选用西门子变频器,型号为6SL32240CG311UA0;或ABB变频器型号 ACS850-04-030A-5+J400+N3050+N5050;依据现场情况选配进线电抗器。 制动电阻阻值为20欧,功率为6KW. 大车运行机构: 2-5T起重机大车运行电机为两台ZDY21-4/,电压为380V,总电流, 选用西门子变频
桥式起重机控制系统
桥式起重机控制系统 台湾国家科技大学,汽车工程专业,郑芳华和杨枯昂设计 摘要:基于定位精度高,小摆角,运输时间短,高安全的要求,设计一桥式起重机控制系统。由于吊车系统符合负载晃动动力学,这是非常难以操纵的方式,因此,本文提出了一种非线性控制的自适应机制,即龙门起重机位置跟踪系统来控制摇摆角的稳定,以确保整体闭环系统的稳定性。通过所设计的控制器,将驱动位置误差减小为零,而摆角迅速衰减使挥杆稳定。整个系统的稳定性证明是根据Lyapunov的稳定性理论,并通过计算机模拟证明了所用控制器的可行性。 ⑥2006年埃尔塞维尔有限公司保留所有权利。 关键词:非线性自适应控制最小相位; Lyapunov稳定性;运动控制 1.简介 由于成本低,易组装和维修少等原因,许多工业应用的吊车系统已被广泛的用于材料运输。所以设计一个满足定位精度高,小摆角,运输时间短,高安全的桥式起重机控制系统成为了控制技术领域的一个有趣的问题。吊车运动是相对欠驱动的摇摆运动,是一种非常难以操作自动方式。一般来说,人的司机往往通过自动防摇系统的协助下,并参与了桥式起重机系统的运作,由此产生的性能和安全等方面的不足,很大程度上取决于他们的经验和能力。基于这个原因,激发了许多人对桥式起重机自动控制系统设计的兴趣。众所周知,缺乏实际控制输入会导致严重的非线性运动和摇摆运动,同时带来了大幅摇摆振荡,尤其是在起重和到达的阶段。这些不良现象也使传统的控制方式不能达到目标,因此,架空吊车系统属于不完整的控制系统类别,只允许数量有限的输入量来控制多个输出。在这种情况下,无法控制的振荡,可能会导致严重的稳定性和安全性的缺乏,并强烈制约着运作效率。此外,起重机系统可能会遇到不同加载条件下参数变化范围的影响。因此,一个强大的和微妙的控制器,它能够减少这些不利的摇摆和不确定性,不仅提高了效率和安全性,也使该系统更适用于其他工程范围。 在文献[1]中提出的非线性控制器是通过Lyapunov的方法和滑动面控制技术改进后的方案,可以实现车位置控制。然而,没有考虑到摆角的动态稳定性。在文献[2]中提出的是利用比例微分(PD)控制器设计的渐近调节系统,可控制桥式起重机在自然阻尼振荡时的位置。在文献[3]中提出的一种模糊逻辑的滑模控制控制系统,是桥式吊车系统的发展方向。在文献[4]中,利用了非线性耦合控制法来稳定摆角,并使用拉萨尔不变性定理来完成三自由度桥式吊车系统的动作。但是,系统参数必须是预先知道的。在文献[5]中,伯格等人通过调节变量变换的方法设计的起重机系统。在文献[6]中,作者使用了一个自适应反馈线性化方法来使系统稳定。在文献[7]中提出的是一个利用机械系统的被动属性用来