基于ENVI软件的遥感信息处理
基于ENVI软件的遥感信息处理
实验报告
一、遥感数据预处理:辐射亮度与表观反射率的计算
1.实验目的
将传感器记录的数字量化值(DN)转换成绝对辐射亮度值(辐射率)与地表(表观)反射率等物理量有关的相对值的处理过程。
2.实验原理
●DN值转为辐射亮度
公式:L rad =(DN-1)*Unit Conversion Coefficient。
其中:L rad-----辐射亮度;
DN-----遥感影像像元亮度值,记录地物的灰度值(无单位,是一个整数值,值大小与传感器的辐射分辨率、地物发射率、大气透过率和散射率等有关);
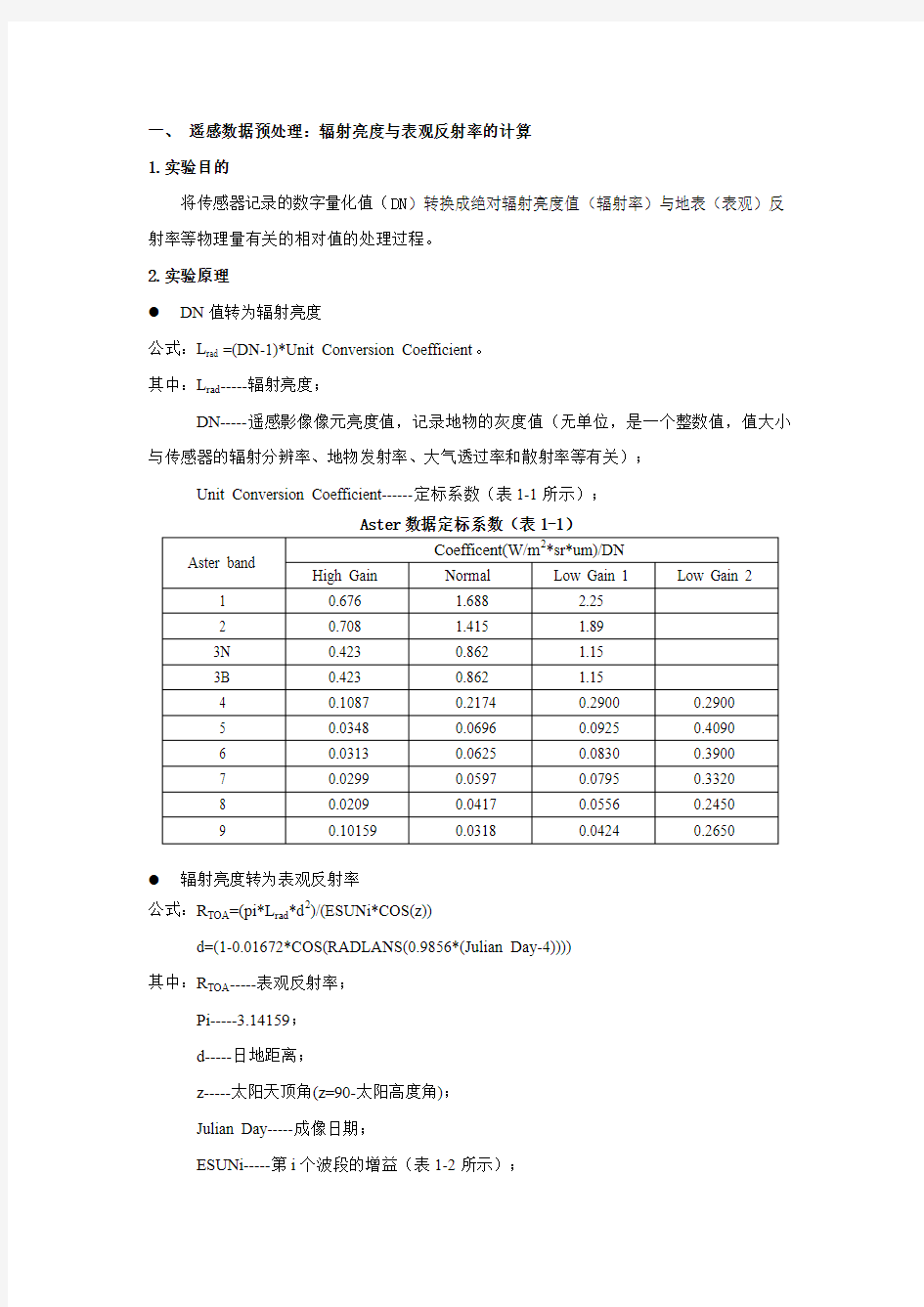
Unit Conversion Coefficient------定标系数(表1-1所示);
Aster数据定标系数(表1-1)
Aster band
Coefficent(W/m2*sr*um)/DN
High Gain Normal Low Gain 1 Low Gain 2
1 0.676 1.688 2.25
2 0.708 1.415 1.89
3N 0.423 0.862 1.15
3B 0.423 0.862 1.15
4 0.1087 0.2174 0.2900 0.2900
5 0.0348 0.069
6 0.0925 0.4090
6 0.0313 0.0625 0.0830 0.3900
7 0.0299 0.0597 0.0795 0.3320
8 0.0209 0.0417 0.0556 0.2450
9 0.10159 0.0318 0.0424 0.2650
●辐射亮度转为表观反射率
公式:R TOA=(pi*L rad*d2)/(ESUNi*COS(z))
d=(1-0.01672*COS(RADLANS(0.9856*(Julian Day-4))))
其中:R TOA-----表观反射率;
Pi-----3.14159;
d-----日地距离;
z-----太阳天顶角(z=90-太阳高度角);
Julian Day-----成像日期;
ESUNi-----第i个波段的增益(表1-2所示);
Aster数据各个波段增益(表1-2)
Aster band Smith:ESUNi Thome et al(A):ESUNi Thome et al(A):ESUNi B1 1845.99 1847 1848
B2 1555.74 1553 1549
B3N 1119.47 1118 1114
B4 231.25 232.5 225.4
B5 79.81 80.32 86.63
B6 74.99 74.92 81.85
B7 68.66 69.20 74.85
B8 59.74 59.82 66.49
B9 56.92 57.32 59.85
3.数据来源
本次实验所使用数据为2001年宜昌地区遥感影像,该数据为Aster1-9波段,30米分辨率,投影为WGS-84,UL纬度为30.82418333,UL经度为111.21726944。
4.实现过程
(1)打开并显示影像文件,选择合适的波段组合加载影像
打开并显示aster影像文件,从envi主菜单中,选择File——Open Image File选择yichang2001aster_打开,选择band3,band2,band1进行组合加载显示。
(2)使用Band Math对原始数据各个波段进行计算,实现DN值转为辐射亮度envi主菜单选择Basic Tools——Band Math——Enter an expression,输入表达式,即将各个波段的DN值转为辐射亮度的公式依次输入并作用于各个相应的波段,选择File——Save File As——ENVI Standard(注意调整波段顺序),输出数据即为将DN值转换为辐射亮度后的影像。
(3)使用Band Math对原始数据各个波段进行计算,实现DN值转为表观反射率envi主菜单选择Basic Tools——Band Math——Enter an expression,输入表达式,即将各个波段的DN值转为表观反射率的公式依次输入并作用于各个相应的波段,选择File——Save File As——ENVI Standard(注意调整波段顺序),输出数据即为将DN值转换为表观反射率后的影像。
二、地图投影的转换
1.实验目的
把UTM投影影像转换成高斯-克吕格投影和阿尔勃斯投影的影像;任选五个坐标点对,做高斯—克吕格投影的正反算,并与ENVI软件比较计算精度。
2.实验原理
Albers投影,又名“正轴等积割圆锥投影”,圆锥投影的一种。它是假想一个圆锥面与地球椭球旋转轴重合的套在椭球上,按等积条件把地球椭球上的经纬线投影到圆锥面上,然后沿一条母线将圆锥面切开展成平面。Albers投影的参数:参考椭球体 KRASOVSKY,X 轴偏量 0.0000000000,Y轴偏量 0.0000000000,第一标准纬线:25°0′0″N,第二标准纬线:47°0′0″N,中央经线:105°0′0″E,0 0.000 /* 起始经线,坐标原点:0°0′0″,半球参数:Krasovsky a=6378245.0000 b=6356863.0188。
高斯—克吕格投影是一种等角横轴切椭圆柱投影。它是假设一个椭圆柱面与地球椭球体面横切于某一条经线上,按照等角条件将中央经线东、西各3°或1.5°经线范围内的经纬
线投影到椭圆柱面上,然后将椭圆柱面展开成平面而成的。该投影,将中央经线投影为直线,其长度没有变形,与球面实际长度相等,其余经线为向极点收敛的弧线,距中央经线愈远,变形愈大。 赤道线投影后是直线,但有长度变形。除赤道外的其余纬线,投影后为凸向赤道的曲线,并以赤道为对称轴。经线和纬线投影后仍然保持正交。
UTM 投影是横轴等角割椭圆柱投影。椭圆柱割地球于南纬80度、北纬84度两条等高圈,投影后两条相割的经线上没有变形,而中央经线上长度比0.9996。UTM 投影分带方法与高斯-克吕格投影相似,将北纬84度至南纬80度之间按经度分为60个带,每带6度.从西经180度起算。
高斯—克吕格投影正算公式:
???
???+-+++-++=64244222)5861(7201)495(24121m t t m t m Nt X x ηη
??
?
???-++-+
+-+=5
222423
22)5814185(1201
)1(61
m t t t m t m N y ηηη 对于克氏椭球:
B
B B B B B X cos )sin 0039.0sin 6976.0sin 9238.133sin 7799.32005(8611.111134753+++-=
017827
.63996981470067385254.0'2==c e , 其中:
x ,-----y 分别为高斯平面纵坐标与横坐标;
-----X 为子午线弧长;
2
2
2''b
b a e e -=-----,称作第二偏心率;
2
2222;
180
c o s ;
1;c o s ';
L L l l l B
m m c N B e t g B t t -=-----=-----+==-----=-----
π
η
ηη
b
a c c 2
=-----,称作极曲率半径;
-----0L 为中央子午线经度。
(注意:算出的横坐标y 应加上500公里,再在前冠以带号,才是常见的横坐标形式。) 高斯—克吕格投影反算公式:
???
?????+++-++-+-
=6424
222222)459061(25.0)935(5.7901n t t n t t n t B B f f f f f f f f
f ηηπ
η []
542322)24285(5.1)21(30180cos 1n t t n t n B l f f f f f
+++++-=
ηπ
其中:
-----
f B 为底点纬度,以度为单位;
c
y n n f
21η+=
-----;
(注意:其余符号同正算公式,只是以底点纬度代替大地纬度。) 3.数据来源
本次实验所使用数据为envi 软件自带影像,该数据为LandSatTM1-5,7波段,30米分辨率,投影为NAD-27,UL 纬度为44.28246944,UL 经度为-107.82238611。
4.实现过程
(1)打开并显示影像文件,选择合适的波段组合加载影像
打开并显示LandSatTM影像文件,从envi主菜单中,选择File——Open Image File 选择bhtmref.img打开,选择band4,band3,band2进行组合加载显示。
(2)将UTM投影转换为高斯—克吕格投影和Albers投影
envi主菜单中选择Map——Convert Map Projection,进入Convert Map Projection Parameters面板。
选择Change Projection,进入Customized Map Projettion Definition面板,然后新建一个高斯—克吕格投影,输入Projection Name,选择Projection Type、Projection Ellipsoid,输入
False easting、False northing、Latitude of projection origin、Longtitude of central meridian、Scale factor,具体参数值如下图所示。
同样在Customized Map Projettion Definition面板上,也可新建一个Albers投影,从而将UTM投影转换为Albers投影,需要注意的是Albers投影False easting、False northing、Latitude of projection origin、Longtitu of central meridian以及Latitude of standara parallels这些参数与高斯—克吕格投影的异同,具体参数值如下图所示。
(3)输出投影转换结果。
左图:UTM投影→高斯—克吕格投影;
右图:UTM投影→Albers投影;
(4)在高斯—克吕格投影影像任选五个坐标点对(表2-1),利用高斯—克吕格投影正算公式计算出New X,New Y坐标(表2-2),对X与New X,Y与New Y进行比较,计算它们之间的误差大小(表2-3),其中所有计算过程由MATLAB软件完成。
高斯—克吕格投影影像采样的坐标点对(表2-1)
Lat(纬度)Lon(经度)X Y
44.2310916700 -107.7474333300 4903259.0529000280489.89610000 44.2456971200 -107.7353391300 4904849.7695000 281510.29670000 44.2383228700 -107.7387539300 4904039.4234000281210.17930000 44.2179071400 -107.7565837300 4901818.4739000 279709.59460000 44.2401393100 -107.7418437000 4904249.5127000280970.08650000
高斯—克吕格投影正算公式计算的采样坐标点对(2-2)Lat(纬度)Lon(经度)New X New Y
44.2310916700 -107.7474333300 4903259.08422804 280489.77237522 44.2456971200 -107.7353391300 4904849.80003793 281510.17675012 44.2383228700 -107.7387539300 4904039.45453654281210.05754471 44.2179071400 -107.7565837300 4901818.50507534279709.46793029 44.2401393100 -107.7418437000 4904249.54401855280969.96486468
高斯—克吕格投影正算公式与envi软件精度比较(表2-3)Lat(纬度)Lon(经度)New X-X New Y-Y
44.2310916700 -107.7474333300 0.0313280402 -0.1237247800 44.2456971200 -107.7353391300 0.0305379294 -0.1199498800 44.2383228700 -107.7387539300 0.0311365407 -0.1217552900 44.2179071400 -107.7565837300 0.0311753405 -0.1266697100 44.2401393100 -107.7418437000 0.0313185500 -0.1216353200
(5)同样在高斯—克吕格投影影像任选五个坐标点对(表2-1),利用高斯—克吕格投影正算公式计算出New Lat,New Lon坐标(表2-4),对Lat与New Lat,Lon与New Lon 进行比较,计算它们之间的误差大小(表2-5),其中所有计算过程也由MATLAB软件完成。
高斯—克吕格投影反算公式计算的采样坐标点对(2-4)
X Y New Lat New Lon 4903259.052900280489.8961000044.2314314800 -107.7474153100 4904849.769500281510.2967000044.2460371900 -107.7353211800 4904039.423400 281210.1793000044.2386632400 -107.7387359800 4901818.473900279709.5946000044.2182474300 -107.7565656900 4904249.512700280970.0865000044.2404793000 -107.7418257100
高斯—克吕格投影反算公式与envi软件精度比较(表2-5)
X Y New Lat-Lat New Lon-Lon 4903259.052900280489.896100000.0003398100 0.0000180200 4904849.769500281510.296700000.0003400700 0.0000179500 4904039.423400 281210.179300000.0003403700 0.0000179500 4901818.473900279709.594600000.0003402900 0.0000180400 4904249.512700280970.086500000.0003399900 0.0000179900 三、监督分类
1.实验目的
使用学习样本和验证样本两套数据,对遥感影像分别采用最小距离法、最大似然法、神经网络法进行监督分类,并对混淆矩阵,总体分类精度,Kappa系数等进行分析,最后对各分类结果制图。
2.实验原理
监督分类:又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程。它就是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中图像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判断函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类,使每个像元和训练样本作比较,按不同的规则将其划分到与其最相似的样本类,以此完成对整个图像的分类。
最小距离分类法:最小距离法是一种基于距离准则的监督分类方法。最小距离分类首先要根据各已知类别的训练区计算各个类别中心的距离,即类别的均值向量,然后对一个待分类样本(像元)计算其到各个已知类别中心的距离,与哪一类的距离最小,就将该样本判归该类。对一个n个特征,k个类别的分类,设各个类别的均值向量为Mi(i=1,2,……,k),待分类像元用X表示,则最小距离法用下述判别函数对像元进行分类:
()2
11
2
1
])([)]()[(∑=-=--=n
j ij j i T
i i m x M X M X X g ;i=1,2,……,k 。若)(m i n a r g 1X g l i k
i ≤≤=,
则l X ω∈,其中:T 表示转置;j x 是模式向量X 的第j 维分量;ij m 是第i 类别均值向量i M 的第j 维分量。
最大似然分类法:在两类或多类判决中,用统计方法根据最大似然比贝叶斯判决准则法建立非线性判别函数集,假定各类分布函数为正态分布,并选择训练区,计算各待分类样区的归属概率,而进行分类的一种图像分类方法。又称为贝叶斯(Bayes )分类法,是根据Bayes 准则对遥感影像进行分类的,亦称基于最小错误概率的Bayes 分类法。
贝叶斯定理:假设B1,B2…互斥且构成一个完全事件,A 伴随它们出现,已知它们分别发生的先验概率P(Bi),i=1,2,…及A 的条件概率P(A|Bi),则可以得到事件A 的后验概率P(Bi|A)。由概率乘法公式:P(AB)=P(A)*P(B|A)=P(B)*P(A|B),可导出贝叶斯定理公式:
)
()
(*)|()|(B P A P A B P B A P =
。
设有s 个类别,用ω1、ω2、…、ωs 来表示,每个类别发生的概率(先验概率)分别为P(ω1)、P(ω2)、…、P(ωs);设有未知类别的样本X ,其类条件概率分别为P(X|ω1) 、 P(X|ω2) 、…、 P(X|ωs);则根据贝叶斯定理可以得到样本X 出现的后验概率为:
∑===
s
i i i i i i i i P X P P X P X P P X P X P 1
)
(*)|()
(*)|()
()(*)|()|(ωωωωωωω,此时,以样本X 出现的后
验概率作为判别函数来确定样本X 的所属类别,其分类准则为:如果
i i s
j i X X P X P ωωω∈==则),|(max )|(1
。通过简化,可以得到直接的分类准则:
i i i 1
i i ),(|max )(|ωωωωω∈==X P X P P X P s
j 则)()(若。这样,就可以通过观测样本X ,
把先验概率P(ωi)转化为后验概率P(ωi|X),并以后验概率最大的原则确定样本X 的所属类别。
人工神经网络分类法:首先通过已知类别样本对网络进行训练,获得正确的连接权值,即学习过程;然后在该组权值下对未知样本进行预测识别。学习功能是神经网络的最重要特点,神经网络的学习是要通过训练样本确定网络中的各权值ij ω,以保证样本的正确分类或识别。以前馈神经网络为例,其学习算法可表达为对权值的修正:i i ij x y ηω=?,其中ij
ω?
是对从输入神经元j u 到输出神经元i u 的连接权值的修正量;η是控制学习速度的系数。
前馈神经网络的一个著名学习算法是反向传播算法(BP ),主要思想是从后向前(反向)逐层传播传输层的误差,以间接算出隐层误差并调整权值。算法分为两个阶段:第一阶段(正向过程)输入信息从输入层经隐层逐层计算各单元的输出值;第二阶段(反向传播过程)输出误差逐层向后计算出隐层各单元的误差,并用此误差修正前层权值。
正向计算:∑==
i
j j
i ij j net f o
o net )(,ω;定义误差函数(均方误差):
∑-=
j
j j y y E 2)?(21
,其中j j o y =?为输出层的计算值,j y 为训练样本的实际值。显然,误差E 是各权值的函数,因此正确的权值应是使E 极小化的权值。算法原理是在误差曲面中寻找最小值。 3.数据来源
本次实验所使用数据为2001年宜昌地区影像,该数据为Aster1-9波段,30米分辨率,投影为WGS-84,UL 纬度为30.82418333,UL 经度为111.21726944。
4.实现过程
(1)打开并显示aster 影像文件,从envi 主菜单中,选择File ——Open Image File 选择yichang2001aster_打开,选择band3,band2,band1进行组合加载显示。
(2)在mapinfo软件中,使用SQL查询语句获取宜昌市主城区数据并将该数据在mapinfo 中转出并保存为.MIF格式的矢量数据。
Envi主菜单下选择Vecto——Open Vector File——Query.MIF——Load Selected,最终将其加载至envi的display窗口。
(3)Envi主菜单——Basic Tools——Region Of Interest---RIO Tool,对不同的地物分别进行采样。
(4)Envi主菜单——Basic Tools——Masking——Build Mask,进入Mask Definition面板,选择Options——Import EVFs,选中Query.MIF文件做掩膜,输出结果如下图所示。
(5)在Envi主菜单——Classification---Supervised——Minnimum Distance(最小距离分类法),进入Classification Input File面板,需要注意的是点击Select Mask Band按钮,选择上一步输出的掩膜文件,然后进行分类。
(6)在envi主菜单——Classification——Post Classification——Confusion Matrix——Using Ground Trut——ROIS,出现Classification Input File面板,选择上一步分类后的数据结果,进入Match Classes Paramters,将验证样本点与训练样本点同类别进行配对。
(7)使用最小距离分类法对宜昌市主城区遥感影像分类获得的Overall Accuracy = (388/401) 96.7581% ,Kappa Coefficient = 0.9603,而混淆矩阵如下表(表3-1)所示。
最小距离法分类混淆矩阵(表3-1)
Class
Unclassified Ground Truth(Pixels) 植被 黄柏河 居民点 裸地 长江上游 长江下游
Total 0 0 0 0 0 0 0 植被 79 0 0 0 0 0 79 黄柏河 0 60 4 0 0 0 64 居民点 0 0 39 0 0 0 39 裸地 0 0 0 36 0 2 38 长江上游 0 0 0 0 81 0 81 长江下游 0 0 0 7 1 93 100 Total
79
60
43
43
81
95
401
(8)使用最小距离法分类后的遥感影像制图输出如下图所示。
(9)在Envi 主菜单——Classification ——Supervised ——Maxinum Likehood (最大似然分类法),后续操作步骤同最小距离法分类法,使用最大似然分类法对宜昌市主城区遥感影像分类获得的Overall Accuracy = (401/401) 100.0000% ,Kappa Coefficient = 1.0000,而混淆矩阵如下表所示。
最大似然法分类混淆矩阵(表3-2)
Class Unclassified Ground
Truth(Pixels) 植被 黄柏河 居民点 裸地 长江上游 长江下游
Total 0 0 0 0 0 0 0 植被 79 0 0 0 0 0 79 黄柏河 0 60 0 0 0 0 64 居民点 0 0 43 0 0 0 39 裸地 0 0 0 0 0 38 长江上游 0 0 0 0 81 0 81 长江下游
0 0 0 7 1 95 100 Total
79
60
43
43
81
95
401
(10)使用最大似然法分类后的遥感影像制图输出如下图所示。
(11)在Envi 主菜单---Classification---Supervised---Neural Net (神经网络法),使用神经网络分类法对宜昌市主城区遥感影像分类获得的Overall Accuracy = (400/401) 99.7506% Kappa Coefficient = 0.9970 ,而混淆矩阵如下表(表3-3)所示。
最大似然法分类混淆矩阵(表3-3)
Class Unclassified Ground
Truth(Pixels) 植被 黄柏河 居民点
裸地 长江上游
长江下游
Total 0 0 0 0 0 0 0 植被 79 0 0 0 0 0 79 黄柏河 0 60 0 0 0 0 64 居民点 0 0 43 0 0 0 39 裸地 0 0 0 0 0 38 长江上游 0 0 0 0 81 1 81 长江下游
0 0 0 7 1 94 100 Total
79
60
43
43
81
95
401
(12)使用神经网络法分类后的遥感影像制图输出如下图所示。
四、遥感影像几何校正与配准
1.实验目的
几何变形分系统性和非系统性两大类。系统性一般由传感器本身引起,有规律可循和可预测性,非系统性几何变形是不规律的,它可以是传感器平台本身的高度、姿态等不稳定因素,也可以是地球曲率及空气折射的变化以及地形的变化等。几何校正与配准,就是消除这些系统性或非系统性的几何形变,一般情况系统性的几何形变在卫星地面接收站已经完成,我们一般做的是消除非系统性的几何形变。
2.实验原理
使用同一地面区域的一幅或多幅图像之间的相同地物互相匹配,即选择一张图像为基准影像,以使各幅图像中的所有同名像元能够重合。
3.数据来源
使用数据为北京同一地区的遥感影像数据,bjtm1280与bjaster1024,分辨率均为15米。bjtm1280文件信息如下左图所示,bjaster1024文件信息如下左图所示。
4.实现过程
(1)打开并显示图像文件
Envi主菜单---File---Open Image File,将bjtm1280(TM影像)与bjaster1024(Aster 影像),并将它们分别显示在Display中。
(2)启动几何校正模块
envi主菜单---Map---Registration---Select GCPs:Image to Image,打开几何校正模块。选择显示Aster文件的Display为基准图像(Base Image),显示TM文件的Display为待校正图像(Warp Image),点击OK,进入采集地面控制点。
(3)采集地面控制点。
在两个Display中移动方框位置,寻找明显的地物特征点作为输入GCP,然后在Zoom 窗口中,打开定位十字光标,将十字光标移到相同点上。在Ground Control Points Selection 对话框中,单击Add Point,将当前找到的点收集,用同样方法继续寻找其余的点。当选择一定数量的控制点之后(至少3个),可以利用自动找点功能,选择Option---Automatically Generate Points,选择一个匹配波段。
(4)选择校正参数输出结果。
在Ground Control Points Selection对话框中,选择Option---Warp File,选择校正文件(TM 文件),进入Registration Parameters面板,具体参数如下图所示。
envi遥感图像处理之分类
ENVI遥感图像处理之计算机分类 一、非监督分类 1、K—均值分类算法 步骤:1)打开待分类得遥感影像数据 2)依次打开:ENVI主菜单栏—〉Classification—>Unsupervised—>K—Means即进入K均值分类数据文件选择对话框 3)选择待分类得数据文件 4) 选好数据以后,点击OK键,进入K-Means参数设置对话框,进行有关参数得设置,包括分类得类数、分类终止得条件、类均值左右允许误差、最大距离误差以及文件得输出等参数得设置 5)建立光谱类与地物类之间得联系:在新窗口中显示分类结果图: 然后,打开显示窗口菜单栏Tools菜单—>Color Mapping—〉Class ColorMapping…进入分类结果得属性设置对话框,在这里,可以进行类别得名称,显示得颜色等,建立了光谱类与地物类之间得联系。 设置完成以后,点击菜单栏Options-〉Save Chang es 即完成光谱类与地物类联系得确立 6) 类得合并问题:如果分出得类中,有一些需要进行合并,可按以下步骤进行:选择ENVI主菜单Classfaction-〉Post Classfiction—>bine Classes,进入待
合并分类结果数据得选择对话框 点击OK键,进入合并参数设置 对话框,在左边选择要合并得 类,在右边选择合并后得类,点击 Add bination键即完成一组合 并得设置,如此反复,对其她需 合并得类进行此项操作,点击 OK,出现输出文件对话框,选择 输出方式,即完成了类得合并得 操作. 至此,K—均值分类得方法结束。 2、 ISODATA算法 基本操作与K—均值分类相似。 1)进行分类数据文件得选择(依次打开:ENVI主菜单栏—>Cl assification—>Unsupervised—>IsoData即进入 ISODATA算法分类数据文件选择对话框,选择待分类得数据 文件) 2)进行分类得相关参数得设置(点击OK键以后,进入参数设置 对 话 框 , 可 以 进行分类得最大最小类数、 迭代次数等参数得设置) 3)如此,光谱类得划分到此结 束。 4)参瞧K—均值分类得第5-6步,进行光谱类与地物类联系得建立以及类得合并等操作至此,使用ISODATA算法进行分类完成。 二、监督分类 本实验说明以最大似然法为例,进行监督分类得讲解说明。 步骤:1)打开待分类得遥感影像数据文件2)进行训练样本得选取:在窗口中打开一张影像,选择主窗口菜单栏Tools键—〉RegionOf Interest—〉ROI Tools…(或就是在主窗口上单击右键,在弹出得快捷菜单栏中选择ROI To
ENVI遥感图像处理方法
《ENVI遥感图像处理方法》科学出版社2010年6月正式出版 上一篇/ 下一篇 2010-05-26 15:02:30 / 个人分类:ENVI 查看( 643 ) / 评论( 5 ) / 评分( 0 / 0 ) 从上个世纪六十年代E.L.Pruitt提出“遥感”这个词至今,遥感已经成为人类提供了从多维和宏观角度去认识宇宙世界的新方法与新手段。目前,遥感影像日渐成为一种非常可靠、不可替代的空间数据源。ENVI (The Environment for Visualizing Images)是由遥感领域的科学家采 用交互式数据语言IDL(Interactive Data Language)开发的一套功能强大的遥感图像处理软件。ENVI以其强大的图像处理功能,尤其是与ArcGIS 一体化集成,使得众多的影像分析师和科学家选择ENVI来处理遥感图像和获得图像中的信息,从而全面提升了影像的价值。ENVI已经广泛应用于科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防&安全、地球科学、公用设施管理、遥感工程、水利、海洋、测绘勘察和城市与区域规划等众多领域。与此形成鲜明对比的是,目前关于ENVI 的中文教程非常少,给广大用户学习软件和应用软件带来诸多不便。 针对上述情况,在ESRI中国(北京)有限公司的大力支持下,根据多年遥感应用研究和软件操作经验,历时一年半编著完成本书。全书按照遥感图像处理流程由浅到深逐步引导读者掌握ENVI软件操作。各个章节相对独立,读者可视个人情况进行选择阅读。全书分为17章,第1、2、3章介绍了ENVI软件的基础知识,可作为ENVI软件入门,也可作为参考内容;第4、5、6、7、8章介绍了遥感图像处理一般流程,包
遥感影像分类envi
遥感课程教学实验之二: 遥感影像分类 实验二遥感影像的分类遥感影像的监督分类 ?实验目的
理解计算机图像分类的基本原理以及监督分类的过程,学会利用遥感图像处理软ENVI 件对遥感图像进行分类的方法。 ?实验内容 1、遥感图像分类原理。 2、遥感图像监督分类。 3、最大似然法分类 ?实验条件 电脑、ENVI4.5软件。厦门市TM遥感影像。 ?实验步骤 1、启动ENVI软件,从文件菜单打开多波段影像文件,从可用波段列表中装载彩色或假色 影像,显示遥感影像。 2、从主图像窗口的工具Tools →Region of Interest →ROI Tools; 3、在自动打开的ROI Tools窗口中,设定ROI_Type 为“Polygon”(多边形),选定样本采 集的窗口类型,用Zoom(缩放窗口)进行采集。。
4、在选定的窗口如Zoom用鼠标左键画出样本区域,在结束处击鼠标右键二次,样本区域 被红色充填,同时ROI Tools窗口中显示采集样本的信息。采集新的样本点击“New Region”,重新上述步骤进行多个地物样本采集。。 5、从ENVI主菜单中,选 Classification > Supervised > Maximum Likelihood;或在端元 像元采集对话框 Endmember Collection中选择 Algorithm >MaximumLikelihood 进行最大似然法分类。
6、在出现Classification Input File 对话框中,选择输入影像文件,出现 Maximum Likelihood Parameters 对话框。 7、输入常规的分类参数。 设定一个基于似然度的阈值(Set Prpbability Threshold):如不使用阈值,点击“None” 按钮。要对所有的类别使用同一个阈值,点击“Single Value”按钮,在“Probability Threshold”文本框中,输入一个0 到1 之间的值。似然度小于该值的像元不被分入该类。 要为每一类别设置不同的阈值: ●在类别列表中,点击想要设置不同阈值的类别。 ●点击“Multiple Values”来选择它。 ●点击“Assign Multiple Values”按钮。 ●在出现的对话框中,点击一个类别选中它,然后在对话框底部的文本框中输入阈值。为每 个类别重复该步骤。 最后给定输出结果的保存方式:文件或内存,当影像较大时建设保存到文件中,以免因内存不够而出错运算错误。 点击“OK”计算机开始自动分类运算。 8、在可用波段列表中显示分类图像。 ?实验总结
利用ENVI软件进行遥感图像的融合和增强实习报告
遥感图像处理实习报告实验内容:影像融合与增强 班级:测绘1102班 学号: 1110020213 姓名: 指导老师:陈晓宁、黄远程、竞霞、史晓亮 西安科技大学 测绘科学与技术学院 二零一三年一月 实习三影像融合与增强
一、实习内容: 1.掌握ENVI中各种影像融合方法,并比较各方法的优缺点; 2.熟悉ENVI图像增强操作; 3.本实习的数据源为上节已经过校正的资源三号多光谱和全色影像。 二、实习目的: 1.了解和认识各种图像融合方法的原理、内容及要点; 2.熟悉、熟练操作ENVI软件中各种图像融合的方法、步骤并学会加以比较; 3.学习利用ENVI软件进行各种图像增强处理操作; 4.学会定性、定量分析比较图像融合的差异。 三、实习步骤: 1.图像融合: 三波段融合: HSV和Color Normalized (Brovey)变换: 1)从ENVI主菜单中,选择File → Open Image File,分别加载校正后的资源三号多光谱与全色影像到可用波段列表Available Bands List中; 2)选择多光谱3,2,1波段(可以根据需要选择)对应R,G,B,点击Load RGB将多光谱影像加载到显示窗口display#1; 3)在ENVI的主菜单选择Transform → Image Sharpening → HSV; 4)在Select Input RGB Input Bands对话框中,选择Display #1,然后点击OK。 5)从High Resolution Input File对话框中选择全色影像,点击OK。 6)从HSV Sharpening Parameters对话框中,选择重采样方法,并输入输出路径和文件名,点击OK。即可完成HSV变换融合; 与上述方法类似,选择Transform → Image Sharpening → Color Normalized (Brovey),使用Brovey进行融合变换。 多光谱融合: Gram-Schmidt、主成分(PC)和color normalized (CN)变换
利用ENVI软件进行遥感图像的融合和增强实习报告
遥感图像处理实习报告 实验内容:影像融合与增强 班级:测绘1102班 学号:13 姓名: 指导老师:陈晓宁、黄远程、竞霞、史晓亮 西安科技大学 测绘科学与技术学院 二零一三年一月 实习三影像融合与增强
一、实习内容: 1.掌握ENVI中各种影像融合方法,并比较各方法的优缺点; 2.熟悉ENVI图像增强操作; 3.本实习的数据源为上节已经过校正的资源三号多光谱和全色影像。 二、实习目的: 1.了解和认识各种图像融合方法的原理、内容及要点; 2.熟悉、熟练操作ENVI软件中各种图像融合的方法、步骤并学会加以比较; 3.学习利用ENVI软件进行各种图像增强处理操作; 4.学会定性、定量分析比较图像融合的差异。 三、实习步骤: 1.图像融合: 三波段融合: HSV和Color Normalized (Brovey)变换: 1)从ENVI主菜单中,选择File → Open Image File,分别加载校正后的资源三号多光谱与全色影像到可用波段列表Available Bands List中; 2)选择多光谱3,2,1波段(可以根据需要选择)对应R,G,B,点击Load RGB将多光谱影像加载到显示窗口display#1; 3)在ENVI的主菜单选择Transform → Image Sharpening → HSV; 4)在Select Input RGB Input Bands对话框中,选择Display #1,然后点击OK。 5)从High Resolution Input File对话框中选择全色影像,点击OK。 6)从HSV Sharpening Parameters对话框中,选择重采样方法,并输入输出路径和文件名,点击OK。即可完成HSV变换融合;
第1章 感图像处理软件ENVI基本操作
第1章感图像处理软件ENVI基本操作 实验目的:掌握遥感图像处理软件基本界面信息和数据文件的打开方法 主要内容: (1)遥感图像处理软件ENVI界面总体介绍; (2)ENVI软件能识别的图像类型介绍 (3)各种图像文件的打开 重点:ENVI能识别的文件类型 第1节ENVI软件简介 遥感图像处理软件主要有ENVI,PCI ,ERDAS,ERMAPPER等。ENVI 软件(The Environment for Visualizing Images)由美国Research Systems,Inc.公司(RSI)的产品。由遥感领域的科学家采用IDL(Interactive Data Language)开发的一套功能强大的遥感图像处理系统. IDL是进行二维或多维数据可视化、分析和应用开发的理想工具。 ENVI是一个完整的遥感图像处理平台,其软件处理技术覆盖了图像数据的输入/输出、定标、图像增强、纠正、正射校正、镶嵌、数据融合以及各种变换、信息提取、图像分类、基于知识的决策树分类、与GIS的整合、DEM及3维信息提取、雷达数据处理、3维立体显示分析,提供了专业可靠的波谱分析工具和高光谱分析工具。 其主要应用领域:科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防和安全、地球科学、公用设施管理、遥感工程、水利、海洋、测绘勘察和城市与区域规划等。 IDL 是集科学数据分析、可视化表达和跨平台应用开发等功能为一体的第四代可视化计算机语言。它是面向矩阵的、完全支持对数组的直接操作,具有快速分析超大规模数据的能力,速度比传统语言如C、C++等有很大的提升。它包括了高级图像处理能力、交互式二维和三维图形技术、面向对象的编程、OpenGL 硬件图形加速功能、集成的数学分析与统计软件包、完善的信号分析和图像处理功能、灵活的数据输入输出方式、跨平台的图形拥护界面工具包、连接ODBC 兼容数据库、支持远程服务器访问数据以及具有多种外部程序连接方式。它成为数据分析和可视化的首先工具。 其主要应用领域:海洋科学、气象、遥感工程、医学、空间物理、地球科学、测试技术、信号处理、科研教育、天文学、商业等领域。
envi遥感图像处理之图像增强
ENVI遥感图像处理之图像增强 一、对比度增强 1、快速拉伸 步骤:打开数据—>加载图像到窗口—>图像主窗口Enhance菜单进入图像增强 的菜单选项。 原始显示的影像: 进行线性拉伸后的影像:进行高斯拉伸后的影像:
说明:本 菜单栏中包含的图像 快速拉伸的功能还有 0-255的线性拉伸(这 应该是实际的遥感影 像的灰度值,而刚开 始说的那个原始影像 实际上已经经过了 2%的线性拉伸的)、均 衡化拉伸、均方根拉 伸等。 2、交互式拉伸 步骤:选择图像主窗口中的Enhance菜单—>Interactive Stretching进入交互式拉伸的界面 在Stretch_Type菜单下可以选择交互拉伸的类型,有线性拉伸、分段线性拉伸等。 可以在Stretch旁边的文本框中直接输入拉伸的图像的灰度范围,亦可以在input histogram 窗体中用鼠标左键拖动两条竖直虚线进行拉伸范围的选择。 原始图像:
交互式线性拉伸后的图像: 分段线性拉伸后的影像:
高斯拉伸后的影像: 3、直方图匹配 步骤:进行直方图匹配之前必须打开两个窗口显示两个波段或两幅影像。 在两窗口中显示两幅遥感影像—>在待匹配的遥感影像主窗口中选择Enhance菜单—>选择Histogram matching…进入直方图匹配的对话框—>选择匹配到的窗口和匹配的方式,点击OK完成直方图的匹配。 匹配前直方图: 待匹配影像直方图:匹配到影像直方图:
匹配后的直方图: 匹配的交互式对话框: 匹配前影像:匹配后影像:
二、空间增强 1、锐化 步骤:打开窗口主菜单中的Enhance菜单—>选择Filter选项—>Sharpen即可对图像进行锐化。 锐化前影像:锐化后影像: 2、平滑 步骤:打开窗口主菜单中的Enhance菜单—>选择Filter选项—>Smooth(后面的3*3、5*5等代表的是模板的大小)即可对图像进行平滑。
ENVI遥感图像处理
一总述 1 遥感图像处理的目的 遥感的目的是为了获得地物的几何属性和物理属性.但是由于受到大气,目标,传感器等纵多因素的影响,原始的遥感影像中除了有目标地物的信息以外还包含有大气,传感器的运行状态等信息,如果我们只是利用原始的遥感影像,将不能提取出所感兴趣的有效信息, 所以为了实现遥感的最终目的,提取所需的信息,我们必须对遥感影像进行处理. 2 ENVI简介 目前已经开发了一些进行遥感图像处理的软件,例如ENVI,PCI,ERDAS等.现在就简单介绍一下ENVI. ENVI是由美国RSI公司开发的一套功能齐全的遥感图像处理系统,是处理、分析并显示多光谱数据、高光谱数据和雷达数据的高级工具。其完全是由IDL开发,方便灵活,可扩展性强,并可用IDL进行二次开发。现在最高版是4.4版本的. 我们来大概熟悉一下ENVI的主菜单: 可以看出ENVI的主菜单中主要有以下一些工具: 基本工具,分类,空间变换,滤波,波谱工具,制图工具,矢量工具,地形分析,雷达工具 来看一下主菜单中的FILE菜单, 通过选择Open Image File可以打开ENVI 图像文件或其它已知格式的二进制图像文件。ENVI 自动地识别和读取下列类型的文件:TIFF、GeoTIFF、GIF、JPEG、BMP、SRF、HDF、PDS、MAS-50、NLAPS、RADARSAT 和A VHRR 。数据仍保留它原有格式,必要的信息从数据头文件中读取。ENVI也直接读取其它几种文件类型(参见“O pen External File”)。 注意: 若你得到“File does not appear to be a valid Radarsat file” 这样一个错误消息,使用File > Open External File 来选择正确的数据类型。 当ENVI 第一次打开一个文件,它需要关于文件特征的特定信息。通常,这些信息存储在与图像文件同名的一个独立的文本头文件,但是文件扩展名为.hdr 。若文件打开时没有找到ENVI头文件,你必须在Header Information 对话框中输入一些基本的参数. 另外一些数据格式没有.hdr 文件也能自动打开。这些格式包括:TIFF、GeoTIFF、GIF、JPEG、BMP、SRF、HDF、PDS、MAS-50、NLAPS、RADARSAT 和A VHRR 。(ENVI 头文件中含有丰富的信息,例如: ENVI description = { Create New File Result [Tue Oct 19 15:47:45 2004]} samples = 2000 lines = 2000 (图像的大小) bands = 7 header offset = 0 file type = ENVI Standard data type = 4 interleave = bsq (存储方式)
ENVI实验心得
ENVI实验心得姓名: 学号: 班级: 专业:
ENVI——完整的遥感图像处理平台ENVI(The Environment for Visualizing Images)是美国Exelis Visual Information Solutions 公司的旗舰产品。它是由遥感领域的科学家采用交互式数据语言IDL(Interactive Data Language)开发的一套功能强大的遥感图像处理软件。它是快速、便捷、准确地从影像中提取信息的首屈一指的软件解决方案。今天,众多的影像分析师和科学家选择ENVI 来从遥感影像中提取信息。ENVI已经广泛应用于科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防&安全、地球科学、公用设施管理、遥感工程、水利、海洋、测绘勘察和城市与区域规划等领域。 通过本次实验,我学习了ENVI软件的简单使用方法,了解了ENVI软件的一些常用功能。通过利用ENVI软件处理遥感图像,更加深入地学习了遥感方面的基础知识,对遥感应用的研究有了更深层次的理解。 比如,三个波段复合而成的彩色图像含有的信息要多于单波段的图像,而且彩色图像更加直观、鲜明,所以图像复合及假彩色处理是遥感图像处理的常用手段。另外,利用遥感图像可以对图像内场景进行分类,显示出不同类别地物在空间的分布情况。这也就是遥感可以应用于地物探测、识别的原因。 同时通过对ENVI软件的不断熟悉和操作,让我学到很多,ENVI 作为对遥感学习的初步入门软件,熟练地掌握是必须具备的技能,在学习中,我遇到了很多困难,看到很多未知的,不解的知识,还有自
己原先掌握的知识的困惑,很庆幸,我能够和同学交流体会,去图书馆,上网查询,让我体会到学习的乐趣,相信随着对遥感越来越多的接触,我会学到更多,相信这次实习在我将来求知的路上会起到不小的促进作用。并且我总结了一些ENVI的优势。, ENVI具有以下几个优势: 1.先进、可靠的影像分析工具——全套影像信息智能化提取工具, 全面提升影像的价值。 2.专业的光谱分析——高光谱分析一直处于世界领先地位。 3.随心所欲扩展新功能——底层的IDL语言可以帮助用户轻松 地添加、扩展ENVI的功能,甚至开发定制自己的专业遥感平台。 4.流程化图像处理工具——ENVI将众多主流的图像处理过程集 成到流程化(Workflow)图像处理工具中,进一步提高了图像处理的效率。 5.与ArcGIS的整合——从2007年开始,与ESRI公司的全面合 作,为遥感和GIS的一体化集成提供了一个最佳的解决方案。
ENVI遥感图像处理实习指导手册
ENVI遥感图像处理实习指导手册
实习一 ENVI软件基本功能菜单的认识与掌握 1.学时:4 2.目的和要求:认识和熟悉ENVI软件的基本功能菜单,根据菜单的功能分类学习和掌握。 第一部分 ENVI基础 1 通用的图像显示概念 ENVI中的图像显示由一组三个不同的图像窗口组成:主图像窗口、滚动窗口和缩放窗口。ENVI 图像显示的一个例子如图1-1所示。一个显示组的单个图像窗口可以被缩放和放置在屏幕的任何一处。多个图像的显示可以通过从ENVI的window下拉菜单下的选择Start New Display window来启动,或通过点击可用波段列表内的“New Display”。 图1.1 ENVI的显示窗口 (1)主图像窗口 主图像窗口由一幅以全分辨率显示的图像的一部分组成。该窗口在第一次载入一幅图像时自动地被启动。窗口的起始大小由在envi.cfg配置文件中设置的参数控制。它也能动态地被缩放。ENVI允许装载多个主图像窗口及相应的的滚动和缩放窗口。 (2)主图像窗口内的功能菜单 在主图像窗口中,功能菜单条包括5个下拉菜单:File,Overlay,Enhance,Tools,Window。这些菜单共同排列在显示窗口的菜单栏中,使用这些菜单来访问普通的显示操作和交互功能。
(3)滚动窗口 滚动窗口是一个以二次抽样的分辨率显示整幅图像的显示窗口。滚动窗口位置和大小最初在envi.cfg文件中被设置并且可以被修改。只有要显示的图像比主图像窗口以全分辨率能显示的图像大时,才会出现滚动窗口。可以动态地将其缩放到任何大小直至全屏。当练习这一选项时,重采样系数会自动改变以适用于新的图像大小。重采样系数出现在滚动窗口标题栏的括号内。对于滚动窗口中被再次重采样的大图像,可以缩放到区域内,并减少重采样系数。可能出现多个滚动窗口,每个窗口对应于一个已载入的主图像窗口。 (4)缩放窗口 缩放窗口是一个小的图像显示窗口,它以用户自定义的缩放系数使用像元复制来显示主图像窗口的一部分。缩放窗口的大小、位置和系统默认的缩放系数最初在envi.cfg文件中被设置,并且可以被用户修改。缩放窗口提供无限缩放能力,缩放系数出现在窗口标题栏的括号中。缩放窗口能动态地调整大小,直至屏幕中可利用的尺寸。可以显示多个缩放窗口, 每个窗口对应于一个已载入的主显示窗口。 (5)调整窗口大小 许多ENVI窗口能动态调整大小直至全屏。这包括图像显示、矢量窗口及所有除散布图和动画窗口之外的辅助窗口。窗口大小的调整通过用鼠标指针点住它的一角并拖到所需要的图像大小来实现。(6)当前活动显示 每次只有一幅显示的图像(主图像、滚动和缩放窗口的组合)是”激活”的。激活的显示是下一幅图像将被载入的那个显示组。通过在现有波段列表中输入适当的显示数,来设置活动显示。请注意:没有必要为了将一个功能应用到一个显示而激活该显示,并且使用这些功能不会激活显示。 (7)辅助窗口 ENVI图像显示可以有很多相关的辅助窗口。这些窗口典型地由ENVI的交互显示功能来启动,并且可以包括X、Y、Z及任意的剖面、直方图、散点图、表面图(透视图)和动画窗口。它们都各自附属于一个特定的图像显示组。多个显示可以有各自独立的辅助窗口组。 (8)矢量显示列表 矢量显示列表由一个矢量窗口及与之相关的“Vector Window Params” 对话框组成。一个矢量显示组的例子如图1-2所示。同图像显示窗口一样,矢量窗口可以调整大小及放置于屏幕任何位置。(8)显示窗口中的快捷菜单 在一个显示窗口中点击右键,从显示的菜单中选择所需的选项。通过窗口中的任何一个快捷菜单,都可以访问许多显示窗口栏中的交互功能
ENVI遥感图像处理方法
ENVI遥感图像处理方法 部门: xxx 时间: xxx 制作人:xxx 整理范文,仅供参考,可下载自行修改
《ENVI遥感图像处理方法》科学出版社2018年6月正式出版上一篇 / 下一篇2018-05-26 15:02:30 / 个人分类:ENVI 查看( 643 > / 评论( 5 > / 评分( 0 / 0 > 从上个世纪六十年代E.L.Pruitt提出“遥感”这个词至今,遥感已经成为人类提供了从多维和宏观角度去认识宇宙世界的新方法与新手段。目前,遥感影像日渐成为一种非常可靠、不可替代的空间数据源。ENVI (The Environment for Visualizing Images>是由遥感领域的科学家采用交互式数据语言IDL(Interactive Data Language>开发的一套功能强大的遥感图像处理软件。ENVI以其强大的图像处理功能,尤其是与ArcGIS一体化集成,使得众多的影像分析师和科学家选择ENVI来处理遥感图像和获得图像中的信息,从而全面提升了影像的价值。ENVI已经广泛应用于科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防&安全、地球科学、公用设施管理、遥感工程、水利、海洋、测绘勘察和城市与区域规划等众多领域。与此形成鲜明对比的是,目前关于ENVI的中文教程非常少,给广大用户学习软件和应用软件带来诸多不便。 b5E2RGbCAP 针对上述情况,在ESRI中国<北京)有限公司的大力支持下,根据多年遥感应用研究和软件操作经验,历时一年半编著完成本书。全书按照遥感图像处理流程由浅到深逐步引导读者掌握ENVI软件操
作。各个章节相对独立,读者可视个人情况进行选择阅读。全书分为17章,第1、2、3章介绍了ENVI软件的基础知识,可作为ENVI 软件入门,也可作为参考内容;第4、5、6、7、8章介绍了遥感图像处理一般流程,包括图像几何校正、图像融合、图像镶嵌、图像裁剪、图像增强等预处理,图像分类、矢量处理、制图和三维可视化等图像基本处理,这5章又可独立阅读;第9、10、11、12章为专业操作,包括正射校正、面向对象图形特征提取、地形分析、遥感动态监测;第13、14章是光谱分析和高光谱处理方面的内容,包括辐射定标与大气校正、高光谱与光谱分析技术;第15章介绍了ENVI非常灵活的波段运算和波谱运算;第16章介绍了ENVI基本的雷达图像处理功能;第17章介绍了ENVI的二次开发功能。部分章节设有一些完整实例,包括耕地信息提取、林冠状态遥感动态监测、森林开采监测、农业用地变化监测等。书中所有的操作和实例数据都在随书DVD光盘中,可参照书中内容一步步练习。 p1EanqFDPw 全书的编写力求实现内容科学准确、系统完整、通俗易懂,让初学者能快速掌握ENVI软件的操作和应用,同时对专家级用户也具有一定的参考价值。可作为ENVI软件用户的学习指南,对其他从事遥感应用研究的专业人员,以及测绘/遥感/地理信息系统/地理学等相关专业也具有一定的参考价值。全书不仅包括了ENVI主模块的全部功能,还介绍了大气校正模块 遥感图像预处理实习 姓名徐丹学号8 成绩日期 实习内容:遥感图像的裁剪、镶嵌与几何校正 1、在实际的工作中,为何经常需要对影像进行裁剪与镶嵌操作在ENVI软件平台如何实现影像的裁剪与镶嵌,以一示例详细叙述裁剪与镶嵌的具体操作步骤。 由于遥感卫星是在一个预先设计的轨道上运行,星载传感器沿着轨道在地面上的轨迹按一定宽度垂直于运行方向进行扫描,在实际工作中有时需要分析的地区并不完全处在同一幅图像内,这时候需要把多景相邻遥感图像拼接成一个大范围无缝的图像,即图像镶嵌,而图像剪裁的目的则是将研究之外的区域去除。 一、图像裁剪: (1)规则分幅裁剪 a)在主菜单中,选择File ——Open Image File,打开裁剪图像。 b)在主菜单中,选择File——Save File as——ENVI Standard,弹出New File Builder对话框。 c)在New File Builder对话框中,单击Import File按钮,弹出Create New File Input File对话框。 d)在Create New File Input File对话框中,选中Select Input File列表中的裁 剪图像,单击Spatial Subset按钮。 e)在Select Spatial Subset对话框中,单击Image按钮,弹出Subset By Image 对话框。 f)在Subset By Image对话框中,可以通过输入行列数确定剪裁尺寸并按住 鼠标左键拖动图像中的红色矩形框确定剪裁区域,或直接用鼠标左键按红色边框拖动来确定剪裁尺寸以及位置,单击OK按钮。 g)在Select Spatial Subset对话框中可以看到剪裁区域信息,单击OK按钮。 h)在Create New File Input File对话框中,可以通过Spectral Subset按钮选 择输出波段子集,单击OK按钮。 i)选择输出路径及文件名或者选择Memory直接在窗口上显示,单击OK 按钮,完成规则分幅裁剪过程。 ENVI遥感图像配准 一、实验目的: 1、掌握ENVI软件的基本操作和对图像进行基本处理,包括打开图像,保存图像。 2、初步了解图像配准的基本流程及采用不同校准及采样方法生成匹配影像的特点。 3、深刻理解和巩固基本理论知识,掌握基本技能和动手操作能力,提高综合分析问题的能力。 二、实验原理 (1)最邻近法 最邻近法是将最邻近的像元值赋予新像元。该方法优点是输出图像仍然保持原来图像的像元值,简单,处理速度快。缺点就是会产生半个像元位置偏移,可能造成输出图像中某些地物的不连贯。适用于表示分类或某种专题的离散数据,如土地利用,植被类型等。 双线性内插方法是使用临近4个点的像元值,按照其距内插点的距离赋予不同的权重,进行线性内插。该方法具有平均化的滤波效果,边缘受到平滑作用,而产生一个比较连贯的输出图像,其缺点是破坏了原来的像元值,在后来的波谱识别分类分析中,会引起一些问题。 示意图: 由梯形计算公式: 故 同理 最终得: 三次卷积内插法是一种精度较高的方法,通过增加参与计算的邻近像元的数目达到最佳的重采样结果。使用采样点到周围16邻域像元距离加权计算栅格值,方法与双线性内插相似,先在 Y 方向内插四次(或 X 方向),再在 X 方向(或 Y 方向)内插四次,最终得到该像元的栅格值。该方法会加强栅格的细节表现,但是算法复杂,计算量大,同样会改变原来的栅格值,且有可能会超出输入栅格的值域范围。适用于航片和遥感影像的重采样。 作为对双线性内插法的改进,即“不仅考虑到四个直接邻点灰度值的影响,还考虑到各邻点间灰度值变化率的影响”,立方卷积法利用了待采样点周围更大邻域内像素的灰度值作三次插值。其三次多项式表示为: 我们可以设需要计算点的灰度值f(x,y)为: 科技信息 1.ENVI 软件简介 ENVI 全称是 The Environment for Visualizing Images , 是美国 ITT VIS (ITT Visual Information Solutions 公司的旗舰产品, 是由遥感领域的科学家采用交互式数据语言 IDL(InteractiveData Language 开发的一套功能强大的遥感影像处理软件。它是快速、便捷、准确地从影像中提取信息的首屈一指的软件工具。 目前, 众多的影像分析师和科学家选择 ENVI 软件从遥感影像中提取信息。ENVI 软件已经广泛应用于科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防安全、地球科学、公用设施管理、遥感工程、水利、海洋、勘察测绘和城市规划等领域。 2. 影像校正 由于遥感器本身的内部结构、外部因素 (卫星的姿态、轨道、地球的运动和形状等等原因都可能引起影像的几何变形, 这叫几何失真。为了纠正这些影像变形, 所以要对影像进行几何纠正。而进行几何纠正通常是利用影像配准来实现的, 也就是在同一区域里利用基准影像 (或者地图对另一幅影像的校准, 以使两幅影像中的同名像元配准。由此也可以清楚地看到影像配准的目的,就是使得我们能够获得比较准确的影像中的每一个像元所对应的地面的位置,这样在进行定性遥感中才能使得影像之间具有可比性,在定量遥感中才能使得我们能够确定具体目标。 在影像校正过程中, 首先是要选择所谓的地面控制点 (GCP , 这也是影像校正最关键、工作量最大的一步。原则上 GCP 点的分布要求均匀, 并且数量要多, 这样校正的可靠性才比较高。选择的 GCP 点一定是要在影像上容易辨识的, 地面上最好可以实测, 具有较固定的特征, 不会随时间的变化而变化的点。 本文实际采用某区域遥感得到的 SPOT 影像和 TM 影像,分别为 SPOTA 、TMA 、 SPOTB 、 TM B , 以所要分析的影像为例, 是选用 SPOT 影像为基准, 校正 实验:遥感图像的辐射定标 1.实验目的与任务: (1)了解辐射定标的原理; (2)使用ENVI软件自带的定标工具定标 (3)学习使用波段运算进行辐射定标。 2.实验设备与数据: 设备:遥感图像处理系统 数据:焦作2004年3-7和4-8数据 【备注:当 ENVI 第一次打开一个文件,它需要关于文件特征的特定信息。通常,这些信息存储在与图像文件同名的一个独立的文本头文件,但是文件扩展名为.hdr 。若文件打开时没有找到 ENVI头文件,你必须在 Header Information 对话框中输入一些基本的参数. 另外一些数据格式没有 .hdr 文件也能自动打开。这些格式包括:TIFF、 GeoTIFF、GIF、 JPEG、 BMP、 SRF、 HDF、 PDS、 MAS-50、 NLAPS、RADARSAT 和 AVHRR 。 关于ENVI的一些基本知识,我们就介绍到这里,如果想了解更多的,请参考用户手册和ENVI 中的HELP.】。下面是关于ENVI的一些具体应用. 3 辐射定标的过程 拿到一幅原始图像,我们先要进行辐射定标,目的是把图像上的DN值转为辐亮度或者是反射率(即辐射定标).另外通过大气纠正,我们可以消除一些大气的干扰(即大气校正). 本实验主要学习辐射定标。辐射定标的结果可以是表观辐亮度(L),也可以是表观反射率(ρ)。大气校正部分,感兴趣的同学可以自己去关注6S或者其它大气校正的软件。 一般有两种方式:第一种:利用计算公式,在ENVI中利用band math(波段运算)计算辐亮度或者反射率;第二种:利用ENVI自带的对TM的定标工具,进行定标,获取辐亮度或者反射率。 第一种方法:利用计算公式,通过ENVI的波段运算进行定标: IDL基本操作介绍 课题名称:遥感图像处理及ENVIIDL操作实践任课教师: 目录 一、IDL简介 (3) 1.I DL特殊符号说明 (3) 1.1.大写 (3) 1.2.注释符 (3) 1.3.续航符 (3) 2.IDL语法基础 (3) 2.1.变量 (3) 2.2.数组 (5) 3.IDL编程基础 (6) 3.1.定义和编译程序 (6) 3.2.命名和编译源文件 (7) 3.3.程序控制语句 (7) 二、IDL基本操作介绍 (9) 1.题目及要求 (9) 2.解决方案 (9) 2.1数据说明 (9) 2.2二进制文件读取 (10) 2.3各像元的线性变化趋势及显著性概率计算 (12) 2.4有效物候区返青期平均变化趋势统计 (14) 2.5制图输出线性变化趋势 (17) 三、总结 (26) 一、IDL简介 IDL(Interactive Data Language)交互式数据语言是进行二维及多维数据可视化分析及应用开发的理想软件工具。作为面向矩阵、语法简单的第四代可视化语言,IDL 致力于科学数据的可视化和分析,是跨平台应用开发的最佳选择。它集可视、交互分析、大型商业开发为一体,为用户提供了完善、灵活、有效的开发环境。IDL为用户提供了可视化数据分析的解决方案,既可以让科学研究人员交互式浏览和分析数据,又为程序员提供了快速程序原型开发并跨平台发布的高级编程工具。IDL使科学家无需写大量的传统程序就可直接研究数据。IDL被广泛应用于地球科学、医学影像、图像处理、软件开发、大学教学、实验室研究、测试技术、天文、信号处理、防御工程、数学分析、统计等诸多领域。 1.IDL特殊符号说明 在IDL程序中,当在命令行中输入命令时,IDL将会识别大量的特殊字符。下面介绍几种较为重要的特殊符号。 1.1.大写 IDL 对字母的大小写并不敏感,但与操作系统打交道的命令(例如:UNIX 操作系统对IDL 所打开的文件名的大小写敏感)和执行字符串比较命令时除外。 1.2.注释符 在IDL 命令中,分号“;”(英文半角符号)表示注释内容的开始,分号右边的任何文本都被视为是注释,IDL 解释器将忽略它。例如: pro test ;A simple program print,"Hello World !",$ "LYT";This line prints a message end 1.3.续航符 IDL 中的续行符是表示美元的符号“$” 。这表示IDL 语句延续到下一语句行(见上例)。 2.IDL语法基础 2.1.变量 envi遥感图像监督分类 监督分类,又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程。它就是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类。使每个像元和训练样本作比较,按不同的规则将其划分到和其最相似的样本类,以此完成对整个图像的分类。 遥感影像的监督分类一般包括以下6个步骤,如下图所示: 详细操作步骤 第一步:类别定义/特征判别 根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统;对影像进行特征判断,评价图像质量,决定是否需要进行影像增强等预处理。这个过程主要是一个目视查看的过程,为后面样本的选择打下基础。 启动ENVI5.1,打开待分类数据:can_tmr.img。以R:TM Band 5,G: TM Band 4,B:TM Band 3波段组合显示。 通过目视可分辨六类地物:林地、草地/灌木、耕地、裸地、沙地、其他六类。 第二步:样本选择 (1)在图层管理器Layer Manager中,can_tmr.img图层上右键,选择"New Region Of Interest",打开Region of Interest (ROI) Tool面板,下面学习利用选择样本。 1)在Region of Interest (ROI) Tool面板上,设置以下参数: ROI Name:林地 ROI Color: 2)默认ROIs绘制类型为多边形,在影像上辨别林地区域并单击鼠标左键开始绘制多边形样本,一个多边形绘制结束后,双击鼠标左键或者点击鼠标右键,选择Complete and Accept Polygon,完成一个多边形样本的选择; 3)同样方法,在图像别的区域绘制其他样本,样本尽量均匀分布在整个图像上; 4)这样就为林地选好了训练样本。 注:1、如果要对某个样本进行编辑,可将鼠标移到样本上点击右键,选择Edit record是修改样本,点击Delete record是删除样本。 2、一个样本ROI里面可以包含n个多边形或者其他形状的记录(record)。 3、如果不小心关闭了Region of Interest (ROI) Tool面板,可在图层管理器Layer Manager上的某一类样本(感兴趣区)双击鼠标。 (2)在图像上右键选择New ROI,或者在Region of Interest (ROI) Tool面板上,选择工具。重复"林地"样本选择的方法,分别为草地/灌木、耕地、裸地、沙地、其他5类选择样本; (3)如下图为选好好的样本。ENVI遥感图像处理实验二——图像常规处理2
ENVI遥感图像配准实验报告
利用ENVI软件处理遥感影像(精)
ENVI+遥感图像的辐射定标
遥感图像处理及ENVI IDL操作实践分解
envi遥感图像监督分类与非监督分类
相关文档
- ENVI遥感影像处理
- 3-ENVI遥感图像预处理
- ENVI遥感影像处理
- ENVI遥感图像配准实验报告
- envi遥感图像处理之分类
- 第1章 感图像处理软件ENVI基本操作
- ENVI实验心得
- 遥感图像处理基本流程与envi基础
- 遥感图像处理及ENVI IDL操作实践分解
- 利用ENVI软件进行遥感图像的融合和增强实习报告
- envi遥感图像处理之分类
- (完整word版)ENVI遥感图像处理方法
- 遥感影像分类envi
- ENVI遥感影像处理
- ENVI遥感图像处理
- ENVI遥感图像处理方法
- ENVI+遥感图像的辐射定标
- 遥感影像分类envi
- ENVI遥感图像处理基础
- ENVI遥感图像处理实习指导手册