自动控制原理(非自动化)1-3章答案

自动控制原理(非自动化类)教材书后第1章——第3章练习题
1.2 根据题 1.2 图所示的电动机速度控制系统工作原理图
(1) 将a,b 与C,d 用线连接成负反馈系统;
(2) 画出系统框图。
解:1)由于要求接成负
反馈系统,且只能构成
串联型负反馈系统,因
此,控制系统的净输入
电压△U 与U ab 和U cd 之
间满足如下关系:
U U i U
ab
题1.2 图
式中,U ab 意味着 a 点高,
b 点低平,所以,反馈电
压U cd 的c 点应与U ab 的a 点相连接,反馈电压U cd 的d 点应与U ab 的b 点相连接。
2)反馈系统原理框图如图所示。
U i U d n
△U
放大电路电动机负载
-
U ab
测速发电机
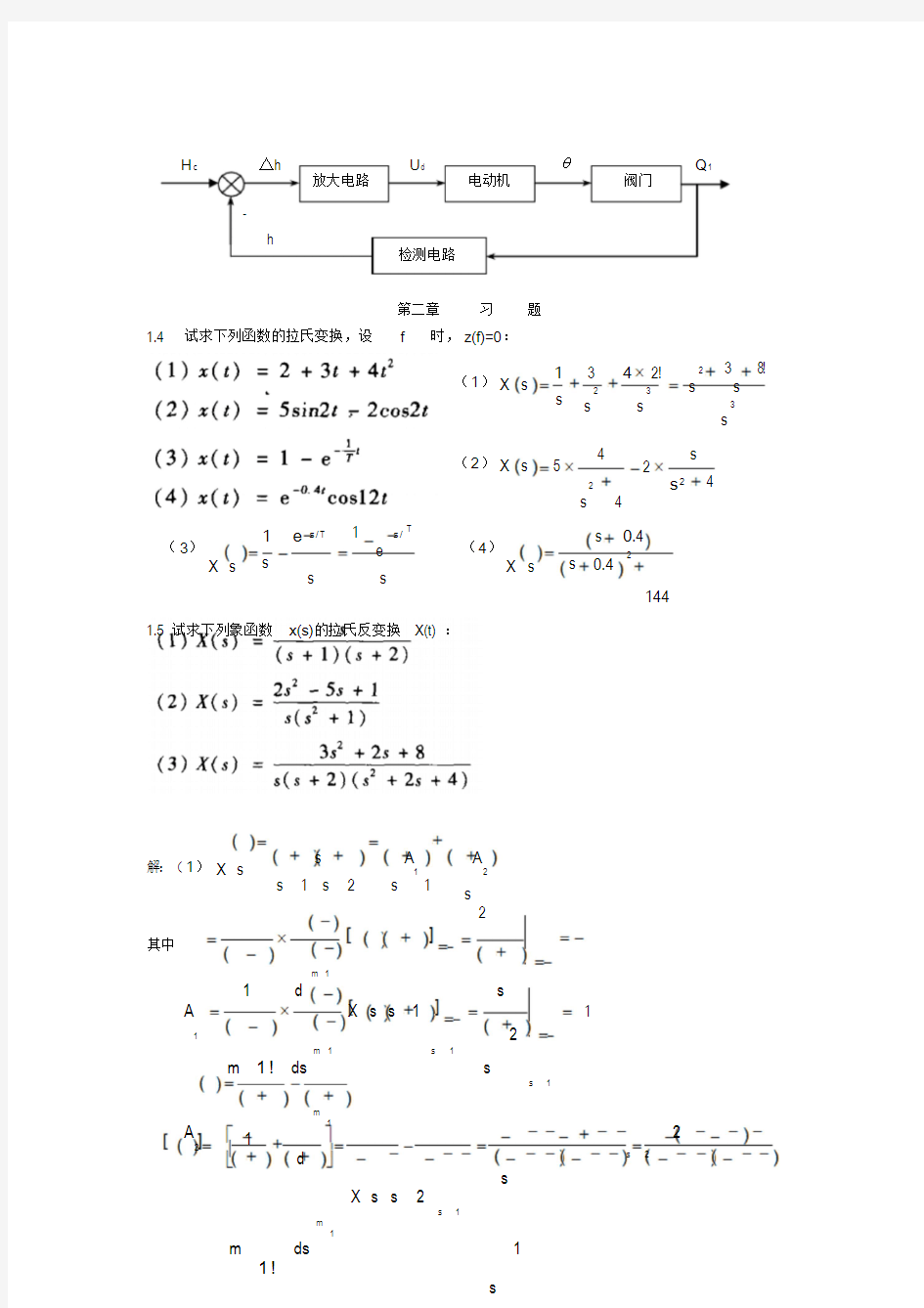
1.3 题1.3 图所示为液位自动控制系统原理示意图。在任何情况下,希望液面高度 c 维持不变,说明系统工作原理并画出系统框图。
题1.3 图
H c △h U d θ
放大电路电动机阀门
Q1 -
h
检测电路
第二章习题
1.4 试求下列函数的拉氏变换,设f (1)X s 1 s 3 2 s 42! 3 s 2 3 8! s s 3 s (2)X s 5 4 2 2 s2 s 4 s 4 (3) X s 1 s e s/ T 1 s/ e s s T (4) X s s s 0.4 0.4 2 144 1.5 试求下列象函数x(s)的拉氏反变换X(t) : 解:(1)X s s 1 s s 2 s A 1 1 A 2 s 2 其中 m 1 1 d s A X s s 1 1 1 2 m 1 s 1 m 1!ds s s 1 A 2 m 1 1 d s X s s 2 s 1 m 1 m ds 1 1! s s 2 2 2 1 X s s 2 s 1 Z X s Z e z 1 2 2 1 2 2e z 1 e z 1 2e e z s 1 s 2 1 e z 1 e z 1 e z 1 e z e z (2)X s 2 2s s 2 s 5s 1 1 2s 2 s 1 2 s 5 1 s 1 2 s 1 2s 2 s 1 5 2 s 1 1 s 2 s s 1 x t 1 cost 5sin t X s s s 2 2 3s2s 8 3s 2s 8 A1 A2 A3 A4 2 2 s 2s4s s2 2 s 1 3 s s 2 s 1 j3 A 1 m 1 1! d ds m m 1 1 X s s 1 s 0 s 2 3s 2 2 s 2s 8 2s 4 s 0 8 8 1 A 2 m 1 1! m d m ds 1 1 X s s 1 s 2 2 3s s 2 s 2s 2s 8 4 s 2 12 4 8 8 2 1.6 已知系统的微分方程为 d 2 y 2 dt t 2 d y dt t 2y t r t 式中,系统输入变量r(f)=6( £),并设,,(O)=) ,(0)=O,求系统的输出y(£)。 Y s 2 s 1 2s 2 R s 1.7 列写题 2.4 图所示RLC 电路的微分方程。其中,u i 为输入变量,u o为输出变量。解:根据回路电压方程可知 Ri t u L t u C t u i t u L t L di t dt i C t C d u C dt t题2.4 图 2 d u t du t C C LC RC u C t u i 2 dt dt t 1.8 列写题 2.5 图所示RLC 电路的微分方程, 其中,u.为输入变量,u。为输出变量。 解:由电路可知 题2.5 图 i t i t L R i C t u t C R i C t u C R t C du C dt t di t u L t L , dt i C t C du C dt t 2 d u t L du t C C u t u t LC u C t u i L 2 C dt R dt t 1.9 设运算放大器放大倍数很大,输入阻抗很大,输出阻抗很小。求题 2.6 图所示运 算放大电路的传递函数。其中,u i 为输入变量,u o 为输出变量。 解:根据运算放大器的特点有 i t R u t i R 1 i R t i f t i C t 题2.6 图 i t f i t C C du C dt t C du o dt t u o t 1 C t i 1 u t 1 t t i C t dt dt u t dt i C R R C 1 1 1.10 简化题 2.7 图所示系统的结构图,并求传递函数 C (s) / R (s)。 题2.7 图 解:根据梅逊公式得: 前向通道传递函数P K:G1 s G2 s 回路传递函数L K:L G s G s H s H s 1 1 2 1 2 L2 G1 s H1 s (注意到回路中含有二个负号) 特征方程式: 1 G s G s H s H s G s H s 1 2 1 2 1 1 余子式: 1 1 于是闭环传递函数为: s C R s s 1 G 1 s G 2 s G 1 H 1 s s G 2 H 2 s s G 1 s H s 1 1.11 简化题 2.8 图所示系统的结构图,并求传递函数 C (s) / R (s)。 题2.8 图 解:根据梅逊公式得: 前向通道传递函数P K:G1 s G2 s 回路传递函数L K:L G s G s H s H s 1 1 2 1 2 L2 G2 s H 2 s 特征方程式: 1 G s G s H s H s G s H s 1 2 1 2 2 2 余子式: 1 1 于是闭环传递函数为: s C R s s 1 G 1 s G 2 s G 1 H 1 s s G 2 H 2 s s G 2 s H s 2 1.12 简化题 2.9 图所示系统的结构图,并求传递函数 C (s) / R (s)。 题2.9 图 解:根据梅逊公式得: 前向通道传递函数P K:P G s G s 1 1 2 P2 G2 s 回路传递函数L K:L G s 1 2 特征方程式: 1 G s 2 余子式: 1 1; 2 1 于是闭环传递函数为: s C R s s G 2 s 1 G 1 G 2 s s G 2 s 1.13 简化题 2.10 图所示系统的结构图,并求传递函数 C (s) / R ( s)。 题2.10 图 解:根据梅逊公式得: 前向通道传递函数P K:P1 G1 s G3 s P2 G2 s G3 s 回路传递函数L K:L G s G s 1 3 4 L2 G4 s 特征方程式: 1 G s G s G s 3 4 4 余子式: 1 1 G4 s ; 2 1 G4 s 于是闭环传递函数为: s C R s s G 2 s G 3 1 s G 3 G s 1 s G 4 G 3 s s G 4 1 s G 4 s 1.14 简化题 2.11 图所示系统的结构图,并求传递函数 C (s) / R ( s)。 解:根据梅逊公式得: 前向通道传递函数P K:P G s G s G s 1 1 2 3 P2 G1 s G4 s 回路传递函数L K:L G s G s H s 1 1 2 1 L2 G2 s G3 s H 2 s L3 G1 s G2 s G3 s L4 G1 s G4 s L5 G4 s H 2 s 特征方程式: 1 G1 s G 2 s G 3 s G1 s G2 s H1 s G2 s G3 s H2 s G1 s G 4 s G4 s H2 s 余子式: 1 1; 2 1 于是闭环传递函数为: s C R s s 1 G 1 s G 2 s G 3 s G 1 s G 1 G 2 s s G 2 H 1 s s G s 3 G 2 s G 1 G 3 s s G 4 H 2 s s G 1 s G 4 s G s 4 H 2 s 1.15 简化题 2.12 图所示系统的结构图,并求传递函数 C (s) / R ( s)。 题2.12 图 解:根据梅逊公式得: 前向通道传递函数P K:P1 G1 s G2 s P2 G1 s G3 s 回路传递函数L K:L G s G s G s 1 1 2 4 特征方程式: 1 G s G s G s 1 2 4 余子式: 1 1; 2 1 于是闭环传递函数为: s C R s s G 1 1 s G 2 G 1 s s G 1 G 2 s s G 3 G s 4 s 1.16 简化题 2.13 图所示系统的结构图,并求传递函数 C (s) / R (s)。 解:根据梅逊公式得: 前向通道传递函数P K:P G s G s 1 1 2 回路传递函数L K:L G s G s H s 1 1 2 1 L2 G2 s L3 G1 s 特征方程式: 1 G1 s G2 s G1 s G2 s H1 s 余子式: 1 1 于是闭环传递函数为: s C R s s 1 G 1 s G s 1 G 2 s G 2 G 1 s s G 2 s H s 1 第三章习题 0.5已知系统特征方程如下,试用劳斯判据判别系统稳定性,并指出位于右半s 平面和虚轴上的特征根的数目。 解:(1)根据劳斯判据的必要条件可知,系统特征方程满足系统稳定的必要条件a i>0。是否满足系统稳定的充分条件,需列劳斯表来判定。 5 1 4 2 S 4 1 4 1 S 3 S 0 1 0 2 -1 0 0 S 1 -1 0 0 S 0 0 S 通过劳斯表的第一列可以看出,系统是不稳定的。 解:(2)根据劳斯判据的必要条件可知,系统特征方程满足系统稳定的必要条件a i>0。是否满足系统稳定的充分条件,需列劳斯表来判定。 6 S 1 5 8 4 5 3 9 6 S 4 S 3 S 2 S 1 S S 解:(3)根据劳斯判据的必要条件可知,系统特征方程满足系统稳定的必要条件a i>0。是否满足系统稳定的充分条件,需列劳斯表来判定。 5 1 12 35 S 4 3 20 25 S 3 S 2 S 1 S S 解:(4)根据劳斯判据的必要条件可知,系统特征方程不足系统稳定的必要条件a i>0。因此,系统不稳定。 1.17 已知单位反馈系统的开环传递函数为 G s s 2 2 s s2 s3 3 s 2 9 10 试用劳斯判据判别系统稳定性。若系统不稳定,指出位于右半s 平面和虚轴上的特征根的数目: 解:(1)由题中单位反馈系统的开环传递函数可知系统的闭环特征方程 D s 5 s4 s3 s2 s s 2 9 10 2 0 根据劳斯判据的必要条件可知,系统特征方程满足系统稳定的必要条件a i >0。是否满足系统稳定的充分条件,需列劳斯表来判定。 5 1 9 1 S 4 2 10 2 S 3 8 0 0 S 2 80 0 0 S 1 160 0 0 S S 0 通过劳斯表的第一列可以看出,系统是稳定的。 3.3 已知单位负反馈控制系统的开环传递函数为 G s s 2 s 2 K n v 2 2 n s n 当ωn=90/s,阻尼比ζ=0.2 时,试确定K v 为何值时系统是稳定的。解:由题可知,单位负反馈控制系统的闭环特征方程为 3 s 2 2 2 2 n s s K n n v 0 3 2 即s 36s 8100s 8100K 0 v 3 1 8100 0 S 2 S 36 8100K v 0 1 S (36- K v)×8100 0 0 0 8100K v 0 0 S 由劳斯判据可知 36- K v>0;K v>0 36> K v>0 3.4 已知反馈系统的开环传递函数为 G s s K 0.6s 1 0.5 s 1 确定系统稳定时的K 值范围。 解:由题中反馈系统的开环传递函数可知系统的闭环特征方程 D s 3 s s K 2 0.55s 0.6 D s 3 s s K 2 s 12 20 20 令s=j ω,则有 D s j 3 j K 2 12 20 20 3 2 20 0 0, 20 1 2, 3 2 20K 12 0 K 0, K 120 0 10 已知反馈控制系统的传递函数为G s , H s 1 K n s s s 1 ,试确定闭环 系统临界稳定时K h 的值。 解:由题可知,反馈系统的开环传递函数为 G s H s 10 1 s s K n 1 s 可知系统的闭环特征方程 D s 2 K s s 10 1 n 10 0 列劳斯表 2 S 110 0 1 S (10K n- 1)0 0 0 10 0 0 S 系统特征方程满足系统稳定的条件是 K 0.1 n - 60t- 1.2 e- 10t 3.6 已知系统的单位阶跃响应为c(t)=l+0.2 e 。试求: (1) 系统的传递函数; (2) 系统的阻尼比ζ和自然振荡频率ωn。 解:(1)由单位阶跃响应可知 C s 1 s 0.7 s 1 60 0.6 s 1 10 2 s 70s 600 s s 2 0.2s 60 s 2s 10 2 1. 2s 72s 600 1 600 s 60 s 10 s s 60 s 10 R s s C R s s s 600 60 s 10 600 2 s s 70 600 (2)设:600 24.5/s n ;70/2 n 1.43 3.7 在零初始条件下,控制系统在输人信号r(t)=l( t)+t1( t)的作用下的输出响应为c(t )= t 1(t), 求系统的传递函数,并确定系统的调节时间t s。 解:由题可知 C s 1 2 s R s 1 s 1 2 s s 2 s 1 系统的传递函数为 s C R s s s 1 1 由传递函数的参数可知,T=1。所以,t s=(3~4) T= (3~4)秒。 3.8 设单位反馈系统的开环传递函数为 G s s 1 s 1 试求:系统的上升时间t r 、超调时间t P、超调量σ%和调节时间t s。解:由题可知 s 1 2 s s 1 其中,2 n 1;n 1,1/2 n 0.5 t r n arccos 2 1 1 0.8 2 0.7 0.3 s t P n 2 1 1 2 2. 3.8s 2 1 1. 81 % e e 16.3% t s 3 n 3 0.5 6 s 5% t s 4 n 4 0.5 8 s 2% 3.9 要求题 3.9 图所示系统具有性能指标:σ%=10%,t P=0.5s。确定系统参数K 和A,并计算t r ,t s。 解:由题可知 2 ln ln 2 2 ln 0.1 0.1 ln 2 0.1 2.3 3.895 0.6 n 2 t 1 0.5 1 P 2 0.6 7.854/s 又因为 K s 1 s K s s 1 As s 1 1 2 s 1 K KA s K 2 2 其中K 7.854 61.685/s;2 n 1 KA,A 2 n 1 /K0.1366 n t r n arccos 2 1 1.18 0.9 1 2 0.8 0.4 s t s 3 n 3. 3 3.9 0.6 s 5% t s 4 n 4 0.6 3.10s 2% 0.2题3.10 图所示控制系统,为使闭环极点为s1,2=- l±j,试确定K 和α的值,并确定这时系统阶跃响应的超调量。 题3.9 图题3.10 图 0.2l 设典型二阶系统的单位阶跃响应曲线如题 3.11 图所示 (1)求阻尼比ζ和自然振荡频率ωn; (2)画出等效的单位反馈系统结构图; (3)写出相应的开环传递函数。 解:由响应曲线图可知:t P=0.3 秒,σ%=25% ,又因为超调量为阴尼比的单值函数,且 2 1 % e 100% 于是有 2 ln ln 2 2 2 ln 2.4 ln 0.25 3.896 0.7 0.7 又由于t,得 P 2 1 n n 2 t 1 0.3 1 P 2 7.8550.3 0.92 11.426 1/ 秒 2 n (2)s 2 s 2 n 2 s n 2 n 1 s s 2 s s 2 n 2 n n (3)系统结构框图为 R(s) E (s) C (s) 2 n s s 2 - n 1.19 单位负反馈控制系统的开环传递函数为 G s s 100 s 10 试求: (1)位置误差系数K P,速度误差系数K v 和加速度误差系数K a; (2)当参考输入r(t)=l+ t +a t。时,系统的稳态误差终值。 解:(1)首先,将传递函数做规范化处理 G s s 100 s 10 s 1 10 s/ 10 由系统开环传递函数可知,该系统为一型系统。所以有 k P 10 lim G s lim s / 0 s 0 s s 1 10 k v 10 lim sG s lim s s 0 s s s/ 1 10 10 k a 10 2 2 lim s G s lim s s 0 s s s 1 /10 (2)当 2 r t 1 t at 时,由该系统为一型系统。所以,系统的稳态误差为 e ss e 1 1 1 2! a 1 1 2!a k P k v k a 1 10 0 1.20 单位负反馈系统的开环传递函数为 G s s 5 s 1 (1)求输入信号为r1(t )=0.1 t 时系统的稳态误差终值; 2 时系统的稳态误差终值。(2)求输入信号为r2(t )=0.01 t