ADAMS分析实例-经典超值

ADAMS 分析实例-定轴轮系和行星轮系传动模拟
有一对外啮合渐开线直齿圆柱体齿轮传动.已知ο20,4,25,5021====αmm m z z ,两个齿轮的
厚度都是50mm 。
⒈ 启动ADAMS
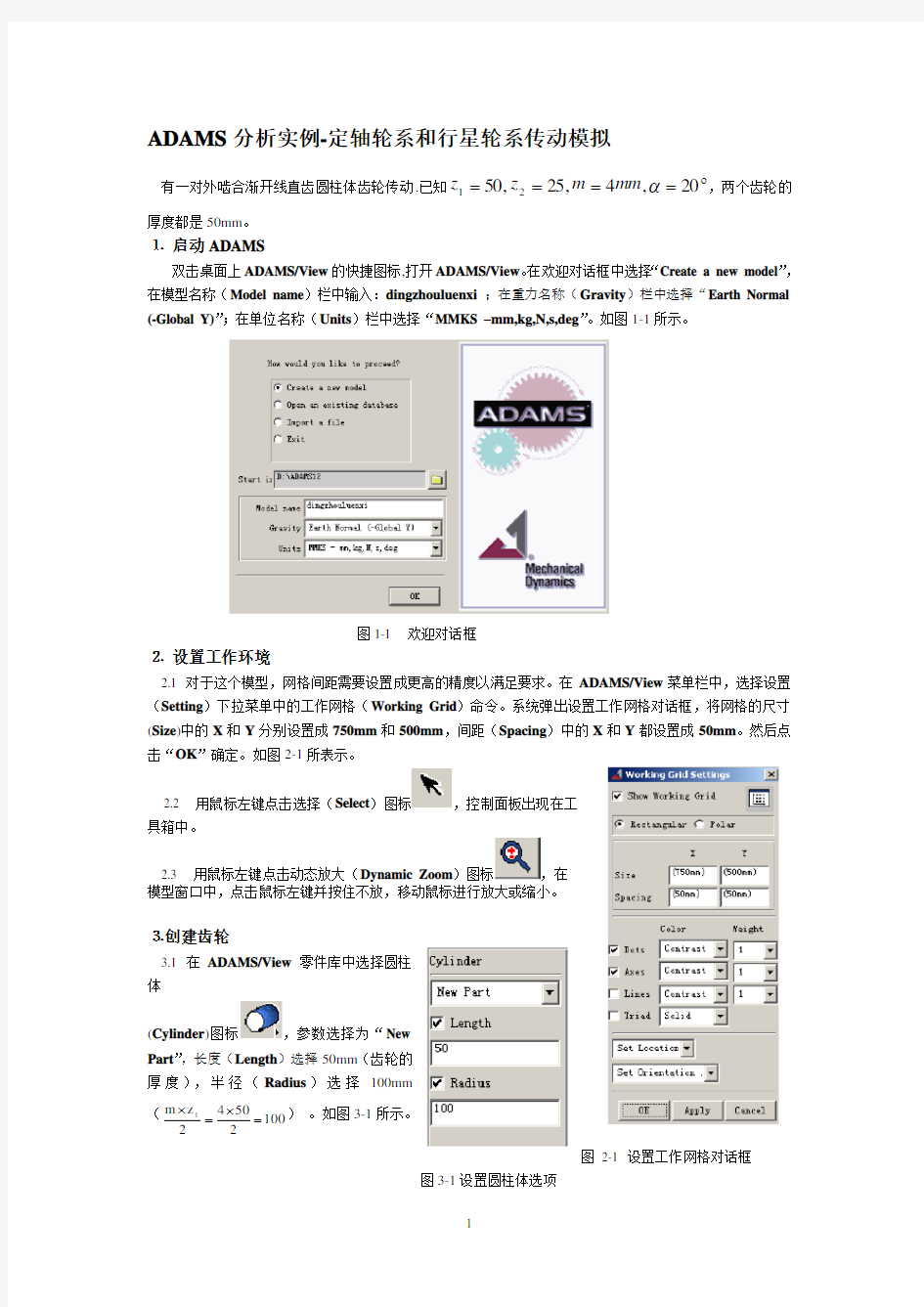
双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。在欢迎对话框中选择“Create a new model ”,
在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。如图1-1所示。
图1-1 欢迎对话框
⒉ 设置工作环境
2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。然后点击“OK ”确定。如图2-1所表示。 2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工
具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮
3.1 在ADAMS/View 零件库中选择圆柱体
(Cylinder )图标
,参数选择为“New
Part ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (1002
5042z m 1=?=?) 。如图3-1所示。
图 2-1 设置工作网格对话框
图3-1设置圆柱体选项
3.2 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。则一个圆柱体(PART_2)创建出来。如图3-2所示。
图3-2 创建圆柱体(齿轮)
3.3 在ADAMS/View 中位置/方向库中选择位置旋转(Position: Rotate …)图标,在角度(Angle )
一栏中输入90,表示将对象旋转90度。如图3-3所示。 在ADAMS/View 窗口中用鼠标左键选择圆柱体,将出来一个白 色箭头,移动光标,使白色箭头的位置和指向如图3-4所示。 然后点击鼠标左键,旋转后的圆柱体如图3-5所示。
3-3 位置旋转选项
图 3-4 圆柱体的位置旋转
图3-5 旋转90后的圆柱体
图3-6设置圆柱体选项
3.4 在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标
,参数选择为“New Part ”,
长度(Length )选择50mm (齿轮的厚度),半径 (Radius )选择50mm (5022542z m 2=?=?),
如图3-6所示。 在ADAMS/View 工作窗口中先用 鼠标左键选择点(150,0,0)mm ,然后选择 点(150,50,0)。则一个圆柱体(PART_3)
创建出来。如图3-7所示。 3-7 创建圆柱体(齿轮)
3.5 在ADAMS/View中位置/方向库中选择位置旋转(Position: Rotate…)
图标,在角度(Angle)一栏中输入90,表示将
对象旋转90度。如图3-3所示。在ADAMS/View
窗口中用鼠标左键选择圆柱体,将出来一个白色箭头
,移动光标,使白色箭头的位置和指向如图3-8所示
。然后点击鼠标左键,旋转后的圆柱体如图3-9所示。
图3-8 圆柱体的位置旋转
图3-9 旋转90后的圆柱体
⒋创建旋转副、齿轮副、旋转驱动
4.1选择ADAMS/View约束库中的旋转副(Joint: Revolute)
图标,参数选择2 Bod-1 Loc和Normal To Grid。在
ADAMS/View工作窗口中先用鼠标左键选择齿轮(PART_2),
然后选择机架(ground),接着选择齿轮上的PART_2.cm,
如图4-1所示。图中显亮的部分就是所创建的旋转副(JOINT_1)
该旋转副连接机架和齿轮,使齿轮能相对机架旋转。
图
4-1 齿轮上的旋转副
4
4.2 再次选择ADAMS/View约束库中的旋转副(Joint:
Revolute)图标,参数选择2 Bod-1 Loc和Normal To
Grid。在ADAMS/View工作窗口中先用鼠标左键选择齿轮
(PART_3),然后选择机架(ground),接着选择齿轮上的
PART_3.cm,如图4-2所示。图中显亮的部分就是所创建的旋
转副(JOINT_2)该旋转副连接机架和齿轮,使齿轮能相对机架旋
转。图4-2 蜗杆上的旋转副
4.3 创建完两个定轴齿轮上的旋转副后,还要创建两个
定轴齿轮的啮合点(MARKER)。齿轮副的啮合点和旋转副必须有相同的参考连杆(机架),并且啮合点Z 轴的方向与齿轮的传动方向相同。所以在本题中,啮合点(MARKER)必须定义在机架(ground)上,机架可以看作机架。
选择ADAMS/View工具箱的动态选择(Dynamic Pick)图标,将两个齿轮的啮合处进行放大,
再选择动态旋转图标,进行适当的旋转。选择ADAMS/View零件库中的标记点工具图标,参数选择如图4-3所示。选择坐标
为(100,50,0),如图4-4所示,
图中显亮的部分就是所创建的啮
合点(MARKER_14)。
图4-3 标记点的选项
图4-4 蜗轮蜗杆的啮合点
4.4 下面将对上面做出的啮合点进行位置移动和方位旋转,使该啮合点位
于两齿轮中心线上,并使啮合点的Z轴方向与齿轮旋转方向相同。在
ADAMS/View窗口中,在两个齿轮啮合处点击鼠标右键,选择--Maker:
MARKER_14→Modify,如图4-5所示。在弹出的对话框中,将Location
栏的值100.0, 50.0, 0.0改为100.0, 25, 0.0(位置移动),将Orientation栏中的值
0.0, 0.0, 0.0修改为0, 90, 0(方位旋转)。如图4-6所示。点击对话框下面的OK
键进行确定,旋转后的啮合点(MARKER_14)如图4-7所示。从图中可以
看出,啮合点的Z轴(蓝色)Z轴的方向与齿轮的啮合方向相同。
图4-5 属性修改对话框
图4-7 旋转后的啮合点图4-6 进行坐标轴的旋转
4.5 选择ADAMS/View约束库中的齿轮副(Gear)图标,在弹出的对话框中的Joint Name栏中,
点击鼠标右键分别选择JOINT_1、JOINT_2。如图4-7所示。在Common Velocity Marker栏中,点击鼠标右键选择啮合点(MARKER_14)。如图4-8
所示,然后点击对话框下面的OK按钮,两个
齿轮的齿轮副创建出来,如图4-9所示
4-7 齿轮副的创建对话框
图4-8 齿轮副的创建要素
图4-9 定轴齿轮的齿轮副
4.6在ADAMS/View驱动库中选择旋转驱动(Rotational Joint Motion)按钮,在Speed一栏中输入360,360表示旋转驱动每秒钟旋转360度。在ADAMS/View工作窗口中,两个齿轮中任选一个作为主动齿轮,本设计中选择左边的齿轮(红色的),用鼠标左键点击齿轮上的旋转副(JOINT_1),一个旋转驱动创建出来,如图4-10所示,图中显亮的部分为旋转驱动。
图4-10 齿轮上的旋转驱动
5仿真模型
5.1 点击仿真按钮,设置仿真终止时间(End Time)为1,仿真工作步长(Step Size)为0.01,
然后点击开始仿真按钮,进行仿真。
5.2 对小齿轮的进行运动分析。因为大齿轮的齿数为501=z ,小齿轮的齿数252=z ,模数mm m 4=,
因此根据机械原理可以知道, 对于标准外啮合渐开线直齿圆柱体齿轮传动,小齿轮的转速为大齿轮的2倍。对小齿轮的旋转副JOINT_2进行角位置分析。在ADAMS/View 工作窗口中用鼠标右键点击小齿轮的旋转副JOINT_2,选择Modify 命令,如图5-1所示,在弹出的修改对话框中选择测量(Measures )图标,如图5-2所示。在弹出的测量对话框中,将Characteristic 栏设置为Ax/Ay/Az Projected Rotation ,将Component 栏设置为Z ,将From/At 栏设置为PART_3.MARKER_5(或者ground.MARKER_6),其他的设置如图5-3所示。然后点击对话框下面的“OK ”确认。生成的时间-角度曲线如图5-4所示。
图5-1旋转副属性修改命令
图5-3测量力对话框的设置
图5-2修改对话框
图 5-4 时间和角度的曲线图
由图5-4可以知道,当大齿轮每秒逆时针转过360度时,小齿轮顺时针转过的角度为720度,符合标准外啮合渐开线直齿圆柱体齿轮传动角速度与齿轮的分度圆半径成反比。
ADAMS 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱
体齿轮传动.已知ο20,4,25,5021
====αmm m z z 。两个齿轮的厚度都是50mm 。
⒈ 启动ADAMS
双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。在欢迎对话框中选择“Create a new model ”,
在模型名称(Model name )栏中输入:xingxingchiluen ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。如图1-1所示。
图1-1 欢迎对话框
⒉ 设置工作环境
2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。然后点击“OK ”确定。如图2-1所表示。
2.2 用鼠标左键点击选择(Select )图标,控制面板出现在
工具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊
创建齿轮
图 2-1 设置工作网格对话框 3.1 在ADAMS/View 零件库中选择圆柱 体(Cylinder )图标
,参数选择为“New
Part ”,长度(Length )选择50mm (齿轮 的厚度),半径(Radius )选择100mm (10025042z m 1=?=?)。如图3-1所示。
图3-1设置圆柱体选项
3.2 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。则一个圆柱体(PART_2)创建出来。如图3-2所示。
3-2 创建圆柱体(齿轮)
3.3 在ADAMS/View 中位置/方向库中选择位置旋转(Position: Rotate …)图标
,在角度(Angle )一栏中输入90,表示将对象旋转90度。如图3-3
所示。在ADAMS/View 窗口中用鼠标左键选择圆柱体,将出来一个白色箭头,移动光标,使白色箭头的位置和指向如图3-4所示。然后点击鼠标左键,旋转后的圆柱体如图3-5所示。
图
3-3 位置旋转选项
图 3-4 圆柱体的位置旋转
图 3-5 旋转90后的圆柱体
3.4 在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标
,参数选择为“New Part ”,
长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择50mm (5022542z m 2=?=?)如
图3-1所示。 在ADAMS/View 工作窗口中先用鼠标左键选择点(150,0,0)mm ,然后选择 点(150,50,0)。则一个圆柱体(PART_3) 创建出来。如图3-6所示。
图3-6 创建圆柱体(齿轮)
3.5 在ADAMS/View中位置/方向库中选择位置旋转
(Position: Rotate…)图标,在角度(Angle)一栏中输
入90,表示将对象旋转90度。如图3-3所示。在ADAMS/View
窗口中用鼠标左键选择圆柱体,将出来一个白色箭头,移动
光标,使白色箭头的位置和指向如图3-7所示。然后点击鼠
标左键,旋转后的圆柱体如图3-8所示。
3-7 圆柱体的位置旋转
图3-8 旋转90后的圆柱体
3.6在ADAMS/View零件库中选择杆件(Link)图标,参数选择为如图3-9所示。在ADAMS/View 工作窗口中先用鼠标左键选择点PART_2.MARKER_1,然后选择点PART_3.MARKER_2。则一个连杆(PART_4)创建出来。如图3-10所示。
图3-10 创建的连杆
⒋创建旋转副、齿轮副、固定副、旋转驱动
4.1在本设计选择左边的齿轮(红色的)为固定齿轮
选择ADAMS/View约束库中的旋转副(Joint: Revolute)
图标,参数选择2 Bod-1 Loc和Normal To Grid。在
ADAMS/View工作窗口中先用鼠标左键选择连杆
(PART_4),然后选择机架(ground),接着选择齿轮上的
PART_4.MARKER_3,如图4-1所示。图中显亮的部分就是
所创建的旋转副(JOINT_1),该旋转副连接机架和连杆,使连
杆能相对机架旋转。图4-1 连杆的旋转副
4.2 再次选择ADAMS/View约束库中的旋转副
(Joint: Revolute)图标,参数选择2 Bod-1 Loc
和Normal To Grid。在ADAMS/View工作窗口中先用鼠
标左键选择齿轮(PART_2),然后选择连杆(PART_4),
接着选择齿轮上的PART_2.cm(或者
PART_2.MARKER_1),如图4-2所示。图中显亮的部分
就是所创建的旋转副(JOINT_2),该旋转副连接连杆和固
定齿轮,使连杆能相对固定齿轮旋转。因为JOINT_1和
JOINT_2重合在一起,所以从图4-2中区分不出来。
图4-2 固定齿轮的旋转副
4.3 再次选择ADAMS/View约束库中的旋转副
(Joint: Revolute)图标,参数选择2 Bod-1 Loc和
Normal To Grid。在ADAMS/View工作窗口中先用鼠标
左键选择齿轮(PART_3),然后选择连杆(PART_4),接
着选择齿轮上的PART_3.cm(或者
PART_3.MARKER_2),如图4-3所示。图中显亮的部分
就是所创建的旋转副(JOINT_3),该旋转副连接连杆和行
星轮,使连杆能带动行星轮旋转。
图4-3 行星轮的旋转副
4.4 创建完两个齿轮和连杆上的旋转副后,还要创建两个齿轮的啮合点(MARKER)。因为行星轮要在固定齿轮上做圆周运动,所以行星轮和固定齿轮的啮合点不是固定不动的,它随着行星轮的运动而不断地变化,因此,可以把啮合点固定在连杆上,因为连杆和行星轮一起做圆周运动,并且两齿轮旋转中心的连线一定经过啮合点。下面我们将把啮合点画在连杆,并且使啮合点Z轴的方向与齿轮的传动方向相同。
选择ADAMS/View零件库中的标记点工具图标,参数选择如图4-4所示。选择连杆(PART_4),在选择连杆上点PART_4.cm,如图4-5所示,图中显亮的部分就是所创建的啮合点(MARKER_11)。
图4-4 标记点的选项
图4-5 固定齿轮和行星轮之间的啮合点
4.5 上面所创建的啮合点不在两个齿轮的分度圆的交线上,下面将对上面做出的啮合点进行位置移动和方位旋转,使该啮合点位于两齿轮交线上,并使啮合点的Z轴方向与齿轮旋转方向相同。在ADAMS/View窗口中,在两个齿轮啮合处点击鼠标右键,选择--Maker: MARKER_14→Modify,如图4-5所示。在弹出的对话框中,将Location栏的值7
5.0, 25.0, -25.0改为100.0, 25.0, -25.0(位置移动),将Orientation栏中的值0.0, 0.0, 0.0修改为0, 90, 0(方位旋转)。如图4-6所示。点击对话框下面的OK键进行确定,旋转后的啮合点
(MARKER_14)如图4-7所示。从图中可以看出,啮合点的Z轴(蓝
色)Z轴的方向与齿轮的啮合方向相同。
图4-5 属性修改对话框图4-6 进行坐标轴的旋转
图4-7 旋转后的啮合点
4.6 选择ADAMS/View约束库中的齿轮副(Gear)
图标,在弹出的对话框中的Joint Name
栏中,点击鼠标右键分别选择JOINT_2、
JOINT_3。如图4-8所示。在Common Velocity
Marker栏中,点击鼠标右键选择啮合点
(MARKER_11)。如图4-9所示,然后点击对
话框下面的OK按钮,两个齿轮的齿轮副创建
出来,如图4-10所示
图4-8 齿轮副的创建对话框
图4-9 齿轮副的创建要素
图
图4-10 固定齿轮和行星轮的齿轮副
4.7选择ADAMS/View约束库中的固定副(Fixed)图标参数选择2 Bod-1 Loc和Normal To Grid。在ADAMS/View工作窗口中先用鼠标左键选择固定齿轮(PART_2),然后选择机架(ground),接着选择齿轮上的PART_2.cm(或者PART_2.MARKER_1),如图4-11所示。图中显亮的部分就是所创建的固定副(JOINT_4)。
图4-11 施加在固定齿轮上的固定副
4.8在ADAMS/View驱动库中选择旋转驱动(Rotational Joint Motion)按钮,在Speed一栏中输入360,360表示旋转驱动每秒钟旋转360度。在ADAMS/View工作窗口中,两个齿轮中任选一个作为主动齿轮,本设计中选择左边的齿轮(红色的),用鼠标左键点击齿轮上的旋转副(JOINT_1)或者旋转副(JOINT_2),一个旋转驱动创建出来,如图4-12所示,图中显亮的部分为旋转驱动。
图4-12 齿轮上的旋转驱动
5仿真模型
5.1 点击仿真按钮,设置仿真终止时间(End Time)为1,仿真工作步长(Step Size)为0.01,然后点击开始仿真按钮,进行仿真。
5.2 对小齿轮的进行运动分析。对小齿轮的旋转副JOINT_3进行角位置分析。在ADAMS/View 工作窗口中用鼠标右键点击小齿轮的旋转副JOINT_3,选择Modify 命令,如图5-1所示,在弹出的修改对话框中选择测量(Measures )图标,如图5-2所示。在弹出的测量对话框中,将Characteristic 栏设置为Ax/Ay/Az Projected Rotation ,将Component 栏设置为Z ,将From/At 栏设置为PART_4.MARKER_10,(选择该MARKER 点进行测量,将测量出小齿轮相对连杆(PART_4)的相对运动,而连杆的牵连运动已知,最后就能得到小齿轮的绝对运动)其他的设置如图5-3所示。然后点击对话框下面的“OK ”确认。生成的时间-角度曲线如图5-4所示。
图 5-1旋转副属性修改命令
图5-3测量力对话框的设置
图5-2修改对话框
图 5-4 时间和角度的曲线图
在ADAMS 中,以逆时针旋转为正方向。由图5-4可以知道,当杆件每秒逆时针转过360度时,小齿轮逆时针转过的角度为720度,即小齿轮绕大齿轮逆时针公转(牵连运动)360度的同时,其逆时针自转(相对运动)720度,绝对运动(合成运动)=牵连运动+相对运动=360+720=1080。根据机械原理上公式(8-48)
1
2
21z z
H H -=--ωωωω,已知01=ω(与机架固定),360=H ω,501=z ,252=z ,易得10802=ω,
实际结果和理论计算相同。
adams振动分析实例中文版
1.问题描述 研究太阳能板展开前和卫星或火箭分离前卫星的运行。研究其发射振动环境及其对卫星各部件的影响。 2.待解决的问题 在发射过程中,运载火箭给敏感部分航天器部件以高载荷。每个航天器部件和子系统必学设计成能够承受这些高载荷。这就会带来附加的质量,花费高、降低整体性能。 更好的选择是设计运载火箭适配器(launch vehicle adapter)结构。 这部分,将设计一个(launch vehicle adapter)的隔离mount,以在有效频率范围降低发射震动传到敏感部件的部分。关心的敏感部件在太阳能板上,对70-100HZ的输入很敏感,尤其是垂直于板方向的。 三个bushings将launch vehicle adapter和火箭连接起来。Bushing的刚度和阻尼影响70-100HZ范围传递的震动载荷。所以设计问题如下: 找到运载火箭适配器系统理想刚度和阻尼从而达到以下目的: 传到航天器的垂直加速度不被放大; 70-100HZ传递的水平加速度最小。 3.将要学习的 Step1——build:在adams中已存在的模型上添加输入通道和振动执行器来时系统振动,添加输出通道测量响应。 @ Step2——test:定义输入范围并运行一个振动分析来获得自由和强迫振动响应。 Step3——review:对自由振动观察模态振型和瞬态响应,对强迫振动,观察整体响应动画,传递函数。 Step4——improve:在横向添加力并检查传递加速度,改变bushing的刚度阻尼并将结果作比较。添加频域测量供后续设计研究和优化使用。
需创建的东西:振动执行器、输入通道、输出通道 完全非线性模型 打开模型在install dir/vibration/examples/tutorial satellite 文件夹下可将其复制到工作木录。
ADAMS分析实例 超值
ADAMS 分析实例-定轴轮系和行星轮系传动模拟 有一对外啮合渐开线直齿圆柱体齿轮传动.已知ο20,4,25,5021====αmm m z z ,两个齿轮的厚度都是 50mm 。 ⒈ 启动ADAMS 双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。在欢迎对话框中选择“Create a new model ”,在模型名 称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。如图1-1所示。 图1-1 欢迎对话框 ⒉ 设置工作环境 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。然后点击“OK ”确定。如图2-1所表示。 用鼠标左键点击选择(Select )图标,控制面板出现在工 具箱中。 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。 ⒊创建齿轮 在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标 ,参数选择为“New Part ”,长度(Length )选择50mm (齿轮的厚度),半径 ( Radius ) 选 择 100mm (1002 5042z m 1=?=?) 。如图3-1所示。 图 2-1 设 置工作网格对话框 图3-1设置圆柱体选项 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。则一个圆柱体(PART_2)创建出来。如图3-2所示。 图3-2 创建圆柱体(齿轮) 在ADAMS/View 中位置/方向库中选择位置旋转(Position: Rotate …)图标,在角度(Angle )一栏中输入 90,表示将对象旋转90度。如图3-3所示。 在ADAMS/View 窗口中用鼠标左键选择圆柱体,将出来一个白 色箭头,移动光标,使白色箭头的位置和指向如图3-4所示。 然后点击鼠标左键,旋转后的圆柱体如图3-5所示。
ADAMS二次开发及实例
第11章ADAMS二次开发及实例 ADAMS具有很强的二次开发功能,包括ADAMS/View界面的用户化设计,利用cmd语言实现自动建模和仿真控制,通过编制用户子程序满足用户的某些特定需求,甚至可以拓展ADAMS的功能。 本章主要介绍如何定制用户化界面、宏命令的用法和条件循环命令的用法,以及综合以上功能的应用实例。由于用户子程序的主要内容已在第9章进行了详细介绍,因此本章只对所涉及到的用户子程序编译联接操作过程进行简单介绍。 11.1 定制用户界面 ADAMS/View的界面对象都是以层次结构存储在模型数据库中,类似于零件模型的层次结构。所有定制的界面对象都存储在名为GUI的数据库中,该数据库可以很方便地管理所有的标准界面对象。如图11-1所示。
图11-1 界面对象的层次结构 最上层的界面对象是窗口和对话框。如果主要建模窗口起名为main的话,其数据库全名应为.gui.main。 尽管窗口和对话框看起来很相似,但它们却是很不相同的。窗口通常是在用户工作的时候在屏幕上停留一段时间,而对话框通常是在用户输入数据或是进行访问控制时才会出现。窗口有工具条和菜单栏,窗口和对话框也包含其他的界面对象如按钮,标签等等。 大多数用户化操作涉及到创建对话框或者修改标准对话框。但若不用创建一个完整的用户化界面时,则通常只用修改菜单条和工具栏。
ADAMS所包含界面对象属性如表11-1所示。
在大多数情况下,用户定制界面是指制作用户自己的菜单和对话框。
通常可使用菜单编辑器和对话框编辑器来定制界面,通过它们可以很快地访问并改变大多数界面对象和功能。下面就这两方面的内容作简单介绍。11.1.1 定制菜单 1。菜单编辑器 通过以下菜单路径可以调出菜单编辑器窗口: Main menu==》Tools==》Menu==》Modify…… 菜单编辑器窗口如图11-2所示: 图11-2 菜单编辑窗口 在菜单编辑器窗口中显示的是ADAMS菜单文件,菜单文件是按照一定的语法书写的解释性程序文件,在默认情况下,菜单编辑器窗口里显示的是描述ADAMS标准菜单的菜单文件,通过按照一定的语法规则修改该菜
adams应用实例
牵引制动系统性能的问题 机车车辆的牵引制动性能是关系到车辆运行安全与否的一个重要因素。机车车辆的牵引制动系统的牵引制动性能除了要考虑牵引电机、传动系统、制动系统之外,还要考虑轮轨接触的影响。通过MSC.ADAMS/Rail可以对机车车辆的牵引制动性能进行精确的仿真。利用ADAMS/Rail的模板建模方式可以很方便的建立牵引制动系统的模板,然后建立牵引制动子系统,再与转向架和车体等其它子系统组装成整车模型。在ADAMS/Rail中可以定义轮轨之间非线性的摩擦特性,随着蠕滑率的变化而变化的摩擦系数是进行牵引或制动性能分析至关重要的特性。同时,还可以定义随着轨道长度方向变化的摩擦系数,这样可以分析钢轨表面干燥/潮湿的影响。下面是这方面的应用实例。 实例1:Voith Turbo是德国铁道车辆传动系统的一级供应商,主要开发、制造并组装机械、液压及电动系统。他们提供铁道动车的驱动系统,可使机械系统运转更有效,使车辆运营速度更高,更舒适,并节省能源,减少噪音。(摘自:https://www.sodocs.net/doc/338595044.html,) Voith Turbo公司的分析部门需要研究驱动系统和动车系统之间在牵引或制动时的相互耦合作用,如在牵引/制动时的轴系的谐振问题。ADAMS/Rail、ADAMS/Flex、ADAMS/Exchange使得Voith Turbo实现了在其产品开发流程内虚拟产品开发的技术。ADAMS/Rail的模版建模方式使得Voith Turbo能够将其建立的驱动系统模型与其他的供应商提供的车辆模型(包括转向架和车身子系统)联合起来建立一个包含驱动系统的整车模型,非常容易测试配臵不同驱动系统的车辆的动力学性能。其意义在于可以对驱动系统的谐振和稳定性进行研究,并进行优化,以使驱动系统的悬挂装臵所受的冲击加速度不超过许可的范围。 上图所示为考虑传动系统的整车模型在通过湿滑轨面启动时牵引电机的输出扭矩随着仿真时间的变化过程,通过仿真发现了由于轨面的湿滑而导致输出扭矩的振动现象,这一现象是由于机车经过湿滑轨面时产生了打滑现象,引起了传动系统的扭振,所以电机的输出扭矩出现了上下的波动。
Aview使用入门要求
英文资料翻译:ADAMS/View 使用入门
欢迎浏览 MDI 的网址
https://www.sodocs.net/doc/338595044.html,
目 录
目
弹簧挂锁设计问题介绍 1 总论 1 你将学习的内容 1 你将创建的模型 2 设计要求 3 弹簧挂锁的工作原理 3 第二章 建 模 总论 5 建造曲柄和手柄 5 启动 ADAMS/View 并建立一个新的数据文件 熟悉 ADAMS/View 的界面 6 设置工作环境 7 创建设计点 8 建造曲柄(pivot) 9 重新命名曲柄(pivot) 9 建造手柄(handle) 9 用转动副连接各个构件 9 模拟模型的运动 10 观察参数化的效果 10 建造钩子(Hook)和连杆(Slider) 10 建造钩子和连杆 11 用铰链连接各构件 12 模型运动仿真 12 存储你的数据文件 12 第三章 测试初始模型 总论 13 生成地块(Ground Block) 14 加一个 Inplane 虚约束 14 加一个拉压弹簧 15 加一个手柄力 16 弹簧力的测试 16 角度测试 17 生成一个传感器 18 存储模型 18 模型仿真 18 第四章 验证测试结果 总论 20 输入物理样机试验数据 20 用物理样机试验数据建立曲线图 21 编辑曲线图 22 用仿真数据建立曲线图 22 存储模型 23 第一章
录
6
═════════════════════════════════════════════════════ ADAMS/View 使用入门练习 i
目 录
细化模型 总论 24 建立设计变量 24 重新设置设计变量的值 25 第六章 深化设计 总论 26 人工做一次的方案研究 26 运行 Design Study 26 检查方案研究结果 28 第七章 最优化设计 总论 30 调整设计变量 30 运行最优化设计程序 31 第八章 设计过程自定义 总论 34 建立设计变量 34 制作自定义的对话框 34 给对话框填充内容 34 给滑动条赋予命令 35 测试对话框 36 存储对话框 36 修改手柄力值 36 结束语 37 第五章
═════════════════════════════════════════════════════ ADAMS/View 使用入门练习 ii
ADAMS-Vibration模块在悬置系统振动性能分析中的应用知识讲解
ADAMS/Vibration模块在悬置系统振动性能分析中的应用 作者:Simwe 来源:MSC发布时间:2012-05-04 【收藏】【打印】复制连接【大中小】我来说两句:(2) 逛逛论坛 一、动力总成悬置系统的建模 1) 动力总成的主要参数 a) 动力总成的质量 b) 质心位置 c) 动力总成的转动惯量、惯性积 d) 发动机的参数,如发动机在怠速、最大扭矩、额定转速工况下的转速、输出扭矩等。 2) 悬置系统的主要参数 a) 悬置点坐标 b) 悬置刚度 c) 阻尼
d) 安装角度。 图1 动力总成质量特性参数输入 图2 ADAMS动力总成悬置系统示意图 根据动力总成和悬置系统的质量特性参数、几何特性参数、力学特性参数输入,在ADAMS/view中建立动力总成悬置系统虚拟样机模型。 二、动力总成悬置系统的分析 评价悬置系统性能主要从系统的避频、解耦、限位、隔振率等几个方面考察。分为时域、频域下激励信号输入分析。 1) 悬置系统固有频率分析 在ADAMS/Vibration模块下对动力总成悬置系统进行振动模态分析。
图3 模态分析对话框 经仿真分析得到动力总成刚体六阶模态固有频率,如下表所示。表中第二列为系统无阻尼固有频率,它是把系统看作保守系统的前提下得到的,即系统没有阻尼;第三列为系统的阻尼比,也叫相对阻尼系数,即系统阻尼系数与临界阻尼的比值。 图4 模态分析固有频率分布表 根据发动机隔振理论,发动机激振频率与系统固有频率之比大于√2,才能起到隔振的效果;不平路面的激励频率是客观存在,一般小于2.5HZ。 2) 悬置系统振动模态能量解耦分析 能量解耦法是从能量的角度来解释发动机总成悬置系统的振动解耦。如果发动机总成悬置系统作某个自由度的振动,而其他自由度是解耦的,那么系统的振动能量只集中在该自由度上。从能量角度来说,耦合就是沿着某个广义坐标方向的力(力矩)所作的功,转化为系统沿多个广义坐标的动能和势能。 采用能量法解耦的依据是, 当系统在作某个方向的振动而和其它方向解耦时, 则能量只集中于该自由度方向上。
ADAMS入门详解与实例-第03章 添加约束
第3章添加约束 ∑本章主要内容 (1)定义运动副 (2)创建运动副 (3)添加驱动 ∑本章重点 (1)定义运动副 (2)创建运动副 一个系统通常由多个构件组成,各个构件之间通常存在某些约束关系,即一个构件限制另一个构件的运动,这种约束关系成为运动副或铰链。要模拟系统真实的运动情况,需要根据实际情况抽象出相应的运动副,并在构件之间定义运动副,并在构件间定义运动副。要使系统运动起来,需要在运动副上添加驱动和载荷,以及在构件之间施加载荷。驱动的本质也是一种约束,只不过这种约束是约束两个构件按照确定的规律运动,而运动副约束两个构件的运动规律是相对静止的,系统根据运动副建立的约束方程的右边等于零,而根据驱动建立的约束方程的右边等于驱动规律。 3.1 定义运动副 运动副关联两个构件,并限制两个构件之间的相对运动。定义运动副时,一般都需要选择两个构件,即使在只选择一个构件的情况下,也需要将另一个构件默认为大地,而且是第一个构件相对于第二个构件运动。 在ADAMS/View中的运动分为低副(Joints)、高副(Higher Pair Constraints)和基本副(Joint Primitives)3类。如图3-1所示。 图3-1 运动副及驱动的按钮 3.1.1 低副的定义 低副通常具有的物理意义的约束副其两构件通过面接触而构成的运动副。 在ADAMS中低副分为旋转副、滑移副、圆柱副、球绞副、平面副、万向节(胡克副)、螺杆副、齿轮副、耦合副和固定副。其中齿轮副和耦合副是复合副,是在低副的基础上,将两个低副的运动关联起来的运动副,其余的都是非复合副。两个构件在空间中有6个相对自由度,即3个平面自由度和3个旋转自由度,在两个构件之间加了约束副后。运动副所关联的两个构件之间相对自由就有所减少,表3-1所列是低副约束关系的说明。 表3-1 低副的约束关系
ADAMS仿真实例
A Report Submitted in Partial Fulfillment of the Requirements for SYDE 461
Contents Contents ii Table of Figures iv 1Project Summary 1 1.1 Problem statement (1) 1.2 Phase 1 goals (2) 2Design Process 4 3Results Achieved 8 3.1 PCB modifications (8) 3.2 Mechanical issues resolved (9) Limit switches (10) Hip motor encoders (11) 3.3 Gait research (12) 3.4 ADAMS simulation (13) 3.5 Communication testing (15) 4Future Plans 17
5Tentative Schedule 19 Appendix A C3 Meeting Minutes 22 C3 meeting #1 (22) C3 meeting #2 (25) C3 meeting #3 (29)
Table of Figures Figure 1: Black-Box System (4) Figure 2: Detailed System Diagram (5) Figure 3: Limit Switch Placement (10) Figure 4: Hip motor encoder (11) Figure 5: ADAMS model of Hexplorer (14)
ADAMS的入门例子---凸轮机构的建模
ADAMS 的入门例子---凸轮机构的建模 前面已经分别举例说明了连杆机构, 齿轮机构的建模,本篇列举一个凸轮机构建模的例 (1)准备。 打开ADAMS 新建模型,并更换模型窗口背景为白色。 * 广買 L, JR ■匚¥疊5 礁 *3 * Pmr" II J Dn.EipkailHn | Pluima | Smutrinn | 础皿’[ % -』丿 C 吨fn 轴C4E (2)创建凸轮。 这里用封闭的样条曲线创建凸轮。 选择样条曲线按钮。 子。 卜」冲 匚半:H 叭 *■潘 fiodn Cww^xi I Unlicna ' Fenn 淞庐看卞 匸3S [ 血偉 _ PiTiqim , [MOt>eLj 二 蛮苛了 [' fHSUfffl iFftSffl 1 h ea4m 4 CwvHrlns -P Motons ¥ -I- fivrnenrfi H UMrSUm. L VwAblEX h 兀* £r?EB h GA h 匸EH SftlDms -■ 卜 口叭曲事 ■+ MOdiar || StJrch * U. bl . I
] Mviiwf | Fmet | ] DewflftEiptoiaticin ] PI岬审| I 丿0UI c d 丐3莎口^护* L2L P J ?Q f o?(ur>i $圖;1,Fiexa^lt Carnirutnan Soolfiifiia 注意细节窗口,选中CLOSED. Gecmet y: Spline Ne>Af Pan H ? ?■ ■ H ■ .... ■、 F SCbsed^ 'i iiirnii imiiin-iiB! Create by picking: | Poirts ▼ 然后在屏幕中点击8个点,形成凸轮的轮廓。在点到8个点后,右键结束创建。注意第一个点是从坐标原点开始的,这样做的目的是为了方便创建后面的推杆。 推杆用一根线段来表示。选择下图所示的按钮,它是用于创建多条连续线段的。 UHiiif CwwiKiDH ■ iWflUflflB I Fnrctt | Elwnnrrif | Dcugn | Phigjn i|| ih ? * o a o 仮)沿y ? 2国由}cP m £4刖4 Fl"i曲B诃hH 匚如祖叫亡ti# F圈K E 注意细节视图,选择是ONE LINE。就是说创建一条直线。 然后在模型窗口中从坐标原点向上拉出一条线段,长短任意。
基于ADAMS车辆随机振动的模拟仿真研究
10.16638/https://www.sodocs.net/doc/338595044.html,ki.1671-7988.2017.08.032 基于ADAMS车辆随机振动的模拟仿真研究 彭永旗 (长安大学汽车学院,陕西西安710064 ) 摘要:论文以某轿车为研究对象,基于机械系统动力学仿真软件ADAMS/CAR建立包括前后悬架子系统、转向子系统和前后轮胎子系统的车辆整车模型。运用ADAMS/CAR路面建模器建立B级随机路面模型,通过ADAMS/CAR/Ride对整车模型在所建立的随机路面上进行模拟仿真研究,以底盘的加权加速加速度均方根为评价指标,对其进行平顺性评价。 关键词:随机振动;仿真;平顺性;ADAMS 中图分类号:U462.2 文献标识码:A 文章编号:1671-7988 (2017)08-93-03 Simulation and analysis of Vehicle under random vibration input Peng Yongqi ( University of changan automobile institute, Shaanxi Xi 'an 710064 ) Abstract:This paper takes a car as the research object. The multi-body dynamic model of a commercial vehicle is established in which suspensions tires and the vehicle body the steering system are considered. Through the road-builder of the software ADAMS/CAR establish the B random vibration ride and simulation the model through the ADAMS/ CAR/Ride in this B random vibration road. Based on the weighted acceleration root mean square value of the chassis, the ride comfort evaluation is carried out. Keywords: random vibration; simulation; ride comfort; ADAMS CLC NO.: U462.2 Document Code: A Article ID: 1671-7988 (2017)08-93-03 引言 随着经济的发展,人们的生活水平也越来越好,汽车也逐渐走进了千家万户,人们从刚开始对车要求具有良好的动力性和经济性逐渐开始注重车的舒适性,因此,汽车的车辆系统动力学性能越来越值得深入的研究[1]。汽车的平顺性主要是来自路面的随机振动激励的响应,也叫做乘坐舒适性[2]。因此,如何得到一个好的整车模型和真是的随机振动路面模型城为了车辆平顺性评价的关键。 随着计算机技术的迅猛发展,虚拟样机技术也随之发展开来。ADAMS集建模、仿真、运算和分析的机械系统仿真软件,自开发以来,其在汽车、机械和航空领域得到广泛应用。本论文以某小型轿车为研究对象,基于机械系统动力学仿真软件ADAMS/CAR建立包括前后悬架子系统、转向子系统和前后轮胎子系统的车辆整车模型。运用ADAMS/CAR路面建模器建立B级随机路面模型,通过ADAMS/CAR/Ride对整车模型在所建立的随机路面上进行模拟仿真研究,以底盘处的加权加速加速度均方根为评价指标,对其进行平顺性评价。 1、整车仿真模型的建立 汽车是一个由成千上万的零部件组装而成,结构复杂。本论文根据随机振动的平顺性要求,对其进行简化模型,得到了一个包含前后悬架子系统、转向子系统和前后轮胎子系统的车辆整车模型。 作者简介:彭永旗,就读于长安大学。
ADAMS基础知识讲解
新手上路:ADAMS 基础知识讲解(图文并茂) 经过不知道多少个日夜,终于出来一个雏形了,由于时间问题,内容还不全,以后将不断完善,请大家多多支持! 内容大纲如下: 软件介绍 学习书籍 3.软件安装问题 4.常见基础问题 一般问题 有关齿轮副 有关凸轮副 蜗轮蜗杆模拟 有关行星齿轮传动 5.常用函数 函数总体介绍 样条函数:akispl,cubspl 函数 函数 与bistop函数 和sforce函数 ,acf的应用 与CAD数据转换 其他CAD软件 相关 和ADAMS联合仿真篇
一、软件介绍篇 ADAMS是Automatic Dynamics Analysis of Mechanical System缩写,为原MDI公司开发的著名虚拟样机软件。1973年Mr. Michael E. Korybalski取得密西根大学爱娜堡分校(University of Michigan,Ann Arbor)机械工程硕士学历后,受雇于福特汽车担任产品工程师,四年后(1977)与其它等人于美国密执安州爱娜堡镇创立MDI公司(Mechanical Dynamics Inc.)。密西根大学对ADAMS发展具有密不可分的关系,在ADAMS未成熟前,MDI与密西根大学研究学者开发出2D机构分析软件DRAMS,直到1980年第一套3D机构运动分析系统商品化软件,称为ADAMS。2002年3月18日公司并购MDI公司,自此ADAMS并入MSC 产品线名称为(本文仍简称ADAMS)。 ADMAS软件由若干模块组成,分为核心模块、功能扩展模块、专业模块、接口模块、工具箱5类,其中核心模块为ADAMS / View——用户界面模块、ADAMS / Solver——求解器和ADAMS/Postprocessor——专用后处理模块。 ADAMS / View是以用户为中心的交互式图形环境,采用PARASOLID作为实体建模的内核,给用户提供了丰富的零件几何图形库,并且支持布尔运算。同时模块还提供了完整的约束库和力/力矩库,建模工作快速。函数编辑器支持FORTRAN/77、FORTRAN/90中所有函数及ADAMS独有的240余种各类函数。使用ADAMS / View能方便的编辑模型数据,并将模型参数化;用户能方便地进行灵敏度分析和优化设计。ADAMS / View有自己的高级编程语言,具有强大的二次开发功能,用户可实现操作界面的定制。 ADMAS/Solver是ADAMS产品系列中处于心脏地位的仿真“发动机”,能自动形成机械系统模型地动力学方程,提供静力学、运动学和动力学的解算结果。ADMAS/Solver有各种建模和求解选项,可有效解决各种工程应用问题,可对由刚体和柔性体组成的柔性机械系统进行各种仿真分析。用户除输出软件定义的位移、速度、加速度和约束反力外,还可输出自己定义的数据。ADMAS/Solver具有强大的碰撞求解功能,具有强大的二次开发功能,可按用户需求定制求解器,极大满足用户的不同需要。 ADAMS/Postprocessor模块主要用来输出高性能的动画和各种数据曲线,使用户可以方便而快捷地观察、研究ADAMS的仿真结果。该模块既可以在ADAMS / View环境中运行,也可脱离ADAMS / View环境独立运行。 ADAMS是世界上应用广泛且最具有权威性的机械系统动力学仿真分析软件,其全球市场占有率一直保持在50%以上。工程师、设计人员利用ADAMS软件能够建立和测试虚拟样机,实现在计算机上仿真分析复杂机械系统的运动学和动力学性能。 利用ADAMS软件,用户可以快速、方便地创建完全参数化的机械系统几何模型。既可以是在ADMAS软件中直接建造的几何模型,也可以是从其它CAD软件中传过来的造型逼真的几何模型。然后,在几何模型上施加力、力矩和运动激励。最后执行一组与实际状况十分接近的运动仿真测试,所得的测试结果就是机械系统工作过程的实际运动情况。过去需要几星期、甚至几个月才能完成的建造和测试物理样机的工作,现在利用ADAMS软件仅需几个小时就可以完成,并能在物理样机建造前,就可以知道各种设计方案的样机是如何工作的。
adams振动分析实例
Getting Started Using ADAMS/Vibration Overview ADAMS/Vibration, part of the MSC.ADAMS? suite of software, performs frequency-domain analyses. ADAMS/Vibration is a plugin to the interface products ADAMS/Aircraft, ADAMS/Car, ADAMS/Engine, ADAMS/Rail, and ADAMS/View. It can also be used standalone with an ADAMS/Solver model. Using ADAMS/Vibration, you can study forced vibrations within your MSC.ADAMS models. You can also use the results from ADAMS/Vibration in noise/vibration/harshness (NVH) studies to predict the impact of vibrations in automobiles, trains, planes, and so on. ADAMS/Vibration can run in two modes: interactive and batch. This guide focuses on using ADAMS/Vibration in our MSC.ADAMS interface products, such as ADAMS/View (interactive mode). For information on batch mode analysis, refer to the ADAMS/Vibration online help. This guide includes the following sections: ■Introducing the Problem,3 ■Building the Model,9 ■T esting the Model,19 ■Reviewing the Model,23 ■Improving Y our Design,39 ■Optimizing the Model,45
【Adams应用教程】第11章ADAMS二次开发及实例
第11章 ADAMS二次开发及实例 ADAMS具有很强的二次开发功能,包括ADAMS/View界面的用户化设计,利用cmd语言实现自动建模和仿真控制,通过编制用户子程序满足用户的某些特定需求,甚至可以拓展ADAMS的功能。 本章主要介绍如何定制用户化界面、宏命令的用法和条件循环命令的用法,以及综合以上功能的应用实例。由于用户子程序的主要内容已在第9章进行了详细介绍,因此本章只对所涉及到的用户子程序编译联接操作过程进行简单介绍。 11.1 定制用户界面 ADAMS/View的界面对象都是以层次结构存储在模型数据库中,类似于零件模型的层次结构。所有定制的界面对象都存储在名为GUI的数据库中,该数据库可以很方便地管理所有的标准界面对象。如图11-1所示。 图11-1 界面对象的层次结构
机械系统动力学分析及ADAMS应用 最上层的界面对象是窗口和对话框。如果主要建模窗口起名为main的话,其数据库全名应为.gui.main。 尽管窗口和对话框看起来很相似,但它们却是很不相同的。窗口通常是在用户工作的时候在屏幕上停留一段时间,而对话框通常是在用户输入数据或是进行访问控制时才会出现。窗口有工具条和菜单栏,窗口和对话框也包含其他的界面对象如按钮,标签等等。 大多数用户化操作涉及到创建对话框或者修改标准对话框。但若不用创建一个完整的用户化界面时,则通常只用修改菜单条和工具栏。 ADAMS所包含界面对象属性如表11-1所示。 表11-1 ADAMS所包含界面对象属性
第11章ADAMS二次开发及实例 在大多数情况下,用户定制界面是指制作用户自己的菜单和对话框。通常可使用菜单编辑器和对话框编辑器来定制界面,通过它们可以很快地访问并改变大多数界面对象和功能。下面就这两方面的内容作简单介绍。 11.1.1 定制菜单 1。菜单编辑器 通过以下菜单路径可以调出菜单编辑器窗口: Main menu==》Tools==》Menu==》Modify…… 菜单编辑器窗口如图11-2所示: 图11-2 菜单编辑窗口 在菜单编辑器窗口中显示的是ADAMS菜单文件,菜单文件是按照一定的语法书写的解释性程序文件,在默认情况下,菜单编辑器窗口里显示的是描述ADAMS标准菜单的菜单文件,通过按照一定的语法规则修改该菜单文件,就可以得到用户化的菜单。
Nastran生成adams柔性体mnf文件的方法
Nastran生成柔性体mnf文件的方法 (北京诺思多维科技有限公司内部资料https://www.sodocs.net/doc/338595044.html,,forengineer@https://www.sodocs.net/doc/338595044.html, 未经授权,严禁传播) Nastran软件只是有限元求解器,需要前处理软件生成提交给Nastran计算的模型文件,前处理软件有很多,不论用哪个前处理,输出的Nastran模型文件格式都相同。Nastran原来由多家公司所共同开发,所以有多个Nastran版本,如NEi Nastran、CSA/NASTRAN、UAI/NASTRAN、MSC NASTRAN、SAS/NASTRAN、COSMIC NASTRAN、VR/Nastran和NX/NASTRAN,其中就计算精度和计算速度来讲,NEi Nastran都要领先于其他版本的Nastran和有限元求解器。Nastran的求解功能如下所示: ●LINEAR STATIC(线性静力分析) ●PRESTRESS STATIC(线性预应力静力学分析) ●NONLINEAR STATIC(非线性静力学分析) ●MODAL(模态分析) ●MODAL COMPLEX EIGENVALUE(复特征值分析) ●LINEAR PRESTRESS MODAL(线性预应力模态分析) ●NONLINEAR PRESTRESS MODAL(非线性预应力模态分析) ●LINEAR PRESTRESS COMPLEX EIGENVALUE(线性预应力幅特征值分析) ●NONLINEAR PRESTRESS COMPLEX EIGENVALUE(非线性预应力复特征值分析) ●LINEAR BUCKLING(线性屈曲分析) ●NONLINEAR BUCKLING(非线性屈曲分析) ●DIRECT FREQUENCY RESPONSE(直接法频率响应分析) ●MODAL FREQUENCY RESPONSE(模态法频率响应分析) ●LINEAR PRESTRESS FREQUENCY RESPONSE(线性预应力频率响应分析) ●NONLINEAR PRESTRESS FREQUENCY RESPONSE(非线性预应力频率响应分析) ●DIRECT TRANSIENT RESPONSE(直接法瞬态响应分析) ●MODAL TRANSIENT RESPONSE(模态法瞬态响应分析) ●NONLINEAR TRANSIENT RESPONSE(非线性瞬态响应分析) ●LINEAR PRESTRESS TRANSIENT RESPONSE(线性预应力瞬态响应分析) ●NONLINEAR PRESTRESS TRANSIENT RESPONSE(非线性预应力瞬态响应分析) ●LINEAR STEADY STATE HEAT TRANSFER(线性稳态热传递分析) ●NONLINEAR STEADY STATE HEAT TRANSFER(非线性稳态热传递分析) ●NONLINEAR TRANSIENT HEAT TRANSFER(非线性瞬态热传递分析) Nastran的模型文件是文本文件,可以用文本编辑软件,如记事本、写字板等打开进行编辑,对Nastran 的详细使用可以参考本书作者所著的《Nastran快速入门与实例》一书。Nastran的模型文件有标准的格式,通常由3部分组成,如图5-40所示
ADAMS 柔性体运动仿真分析及运用
ADAMS 柔性体运动仿真分析及运用 焦广发,周兰英 (北京理工大学机械与车辆工程学院100081) 摘要介绍了ADAMS柔性体基本理论及在ADAMS中生成柔性体的几种方法,并构建机械系统仿真模型.通过一个实例验证了ADAMS 柔性体运动仿真分析的实效. 关键词:ADAMS 柔性体运动仿真继电器 Application of ADAMS flexible body kinetic simulation Jiao guangfa Zhou lanying (Beijing institute of technology ,school of mechanical and vehicular engineering , Beijing 100081 ) Abstract Introduced the basic theory of ADAMS flexible body and some methods of adding flexible bodies to a model to study the dynamic characteristics of the mechanical system1,constructed mechanical system simulation model1 Tested the validity of the ADAMS flexible kinematical simulation through an example1. Key words :ADAMS Flexible body Kinetic simulation relay ADAMS全称是机械系统自动动力学分析软件,它是目前世界范围内最广泛使用的多体1系统仿真分析软件,其建模仿真的精度和可靠性在现在所有的动力学分析软件中也名列前茅.机械系统动力学仿真分析是机械设计的重要内容,过去分析时建立的模型,其构件都是属于刚体,在作运动分析时不会发生弹性变形.而实际上,在较大载荷或加、减速的情况下,机构受力后会有较大的变形和位移变化,产生振动.ADAMS的分析对象主要是多刚体,但ADAMS提供了柔性体模块,运用该模块可以实现柔性体运动仿真分析,以弹性体代换刚体,可以更真实地模拟出机构动作时的动态行为,同时还可以分析构件的振动情况[1]. 一、ADAMS柔性体理论及生成柔性体的几种方法 ADAMS柔性模块是采用模态来表示物体弹性的,它基于物体的弹性变形是相对于连接物体坐标系的弹性小变形,同时物体坐标系又是经历大的非线性整体移动和转动这个假设建立的.其基本 基金项目:北京市重点学科建设(XK100070424);北京理工大学基金(0303E10) 作者简介:焦广发(1982—),男,河北人,硕士,主要研究方向为动力学仿真,有限元分析和表面涂层技术. 思想是赋予柔性体一个模态集,采用模态展开法,用模态向量和模态坐标的线性组合来表示弹性位移,通过计算每一时刻物体的弹性位移来描述其变形运动.ADAMS柔性模块中的柔性体是用离散化的若干个单元的有限个结点自由度来表示物体的无限多个自由度的.这些单元结点的弹性变形可近似地用少量模态的线性组合来表示. ADAMS提供了四种生成柔性体的方法,对于外形简单的构件,可以采用直接生成柔性件的方法,即拉伸模式;对于外形复杂的构件,可以采用先建刚性件, 再进行网格划分的模式, 即构件网格模式(Solid). 1) 拉伸法生成柔性体:首先要确定拉伸中心线,再定义截面半径、单元尺寸、材料属性等,最后定义好柔性体跟其它构件的连接点即外连点,就可以生成柔性体.模型生成柔性件的同时生成模态中性文件,该模态中性文件中包含了柔性件的质量、质心、转动惯量、频率、振型以及对载荷的参数因子等信息.将模型中原有的刚体件上的运动副修改在柔性件上,使柔性件与模型上的其它构件连接起来,同时删除无效的刚性件.这样可以使模型保持原有的自由度,从而实现柔性构件的运动仿真运算.
工程案例—机器人Adams虚拟实验详细步骤(精)
一.ADAMS软件简介 虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动力学进行仿真的商用软件,由美国MDI (Mechnical Dynamics Inc.)开发,在经历了12个版本后,被美国MSC公司收购。ADAMS集建模、计算和后处理于一体,ADAMS有许多个模块组成,基本模块是View模块和Postprocess模块,通常的机械系统都可以用这两个模块来完成,另外在ADAMS中还针对专业领域而单独开发的一些专用模块和嵌入模块,例如专业模块包括汽车模块ADAMS/Car、发动机模块ADAMS/Engine、火车模块ADAMS/Rail、飞机模块ADAMS/Aircraft等;嵌入模块如振动模块ADAMS/Vibration、耐久性模块ADAMS/Durability、液压模块ADAMS/Hydraulic、控制模块ADAMS/Control和柔性体模块ADAMS/AutoFlex等[3]。 1.1ADAMS软件概述 ADAMS是以计算多体系统动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件,利用它可以建立复杂机械系统的运动学和动力学模型,其模型可以是刚体的,也可以是柔性体,以及刚柔混合体模型。如果在产品的概念设计阶段就采取ADAMS 进行辅助分析,就可以在建造真实的物理样机之前,对产品进行各种性能测试,达到缩短开发周期、降低开发成本的目的。 ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems)该软件是美国MDI公司(Mechnical Dynamics Inc.)开发的虚拟样机分析软件。目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。根据1999年机械系统动态分析软件国际市场份额的统计资料,ADAMS 软件销售总额近八千万美元、占据了51%的份额。 ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,
ams振动分析实例中文版
a m s振动分析实例中文 版 公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
1.问题描述 研究太阳能板展开前和卫星或火箭分离前卫星的运行。研究其发射振动环境及其对卫星各部件的影响。 2.待解决的问题 在发射过程中,运载火箭给敏感部分航天器部件以高载荷。每个航天器部件和子系统必学设计成能够承受这些高载荷。这就会带来附加的质量,花费高、降低整体性能。更好的选择是设计运载火箭适配器(launch vehicle adapter)结构。 这部分,将设计一个(launch vehicle adapter)的隔离mount,以在有效频率范围降低发射震动传到敏感部件的部分。关心的敏感部件在太阳能板上,对70-100HZ的输入很敏感,尤其是垂直于板方向的。 三个bushings将launch vehicle adapter和火箭连接起来。Bushing的刚度和阻尼影响70-100HZ范围传递的震动载荷。所以设计问题如下: 找到运载火箭适配器系统理想刚度和阻尼从而达到以下目的: 传到航天器的垂直加速度不被放大; 70-100HZ传递的水平加速度最小。 3.将要学习的 Step1——build:在adams中已存在的模型上添加输入通道和振动执行器来时系统振动,添加输出通道测量响应。 Step2——test:定义输入范围并运行一个振动分析来获得自由和强迫振动响应。 Step3——review:对自由振动观察模态振型和瞬态响应,对强迫振动,观察整体响应动画,传递函数。 Step4——improve:在横向添加力并检查传递加速度,改变bushing的刚度阻尼并将结果作比较。添加频域测量供后续设计研究和优化使用。
相关文档
- ADAMSVibration振动分析模块教程
- ADAMS分析实例-经典超值
- 基于ADAMS啮合齿轮振动的检测与分析
- 最新ADAMS-Vibration-振动分析模块教程课件ppt
- adams振动分析实例中文版
- ADAMS分析实例-经典超值
- MSC.ADAMS在机车车辆设计中的应用实例
- Adams振动仿真心得
- 工程案例—机器人Adams虚拟实验详细步骤
- adams振动分析实例中文版
- ADAMS分析实例 经典超值
- adams振动分析实例中文版
- ADAMS-Vibration-振动分析模块教程PPT课件
- ADAMS分析实例-经典超值
- adams振动分析实例
- adams分析实例经典超值
- 基于ADAMS的制动抖动现象仿真分析
- adams振动分析实例中文版
- ams振动分析实例中文版
- ADAMS全面教程