DS模型2

迪克西特-斯蒂格利茨模型(Dixit-Stiglitz Model,简称D-S模型)迪克西特-斯蒂格利茨模型概述
新贸易理论和新增长理论是当前经济理论中最热门的研究领域之一,它们的产生和发展在很大程度上则得益于迪克西特-斯蒂格利茨模型的启发,该模型是由迪克西特(A.K. Dixit)和斯蒂格利茨在1977年所发表的《垄断竞争和最优产品的多样性》论文中提出来的。
迪克西特-斯蒂格利茨模型
不论是在国际贸易理论还是在经济增长理论方面,人们日益发现“规模经济”是问题的核心。尽管人们可以在完全竞争的框架下对外部规模经济问题进行研究,但内部规模经济却无法和竞争性的市场结构相兼容。在D-S模型提出以前,由于内部规模经济模型的求解极为复杂、且一般不能求出均衡解(从而更无法进行福利分析和比较),人们不得不借助于外部性、溢出效应和边干边学等似是而非的概念,将研究局限于外部规模经济的分析。不论是经济理论本身还是对经济现实的解释,都要求一种能够对内部规模经济和垄断竞争的市场结构进行严格分析的理论框架,D-S模型则为该问题的解决提供了简洁的基本方法。
迪克西特和斯蒂格利茨在论文中指出,经济学中的一个基本问题是:一个市场解能否导致社会最优的产品数量和产品种类?分配不公、外部效应和规模经济都是导致不完全市场结构、并使得市场均衡解偏离社会最优解的原因。他们的主要目的,是对其中的(内部)规模经济情形进行分析。他们首先构造了著名的迪克西特-斯蒂格利茨效用函数(D-S效用函数,后被引申为D-S生产函数),然后依次在效用函数是不变弹性、可变弹性和非对称性的情形下求出其市场均衡解,并分别在每种情形下对市场均衡解和社会最优解进行了比较。
D-S模型的核心内容体现在消费和生产两个方面:
(1)他们通过构造一个包含产品种类的D-S效用函数,推导出了特定形式的需求函数和张伯伦dd曲线与DD曲线;
(2)他们假定每种产品的生产都具有不变的固定成本和边际成本(这意味着成本函数具有平均成本递减和边际成本不变的性质,从而呈现出内部规模经济的特征),然后结合需求函数和新厂商自由进入的条件,求得每个厂商的均衡产量、均衡价格和产品种类数量。
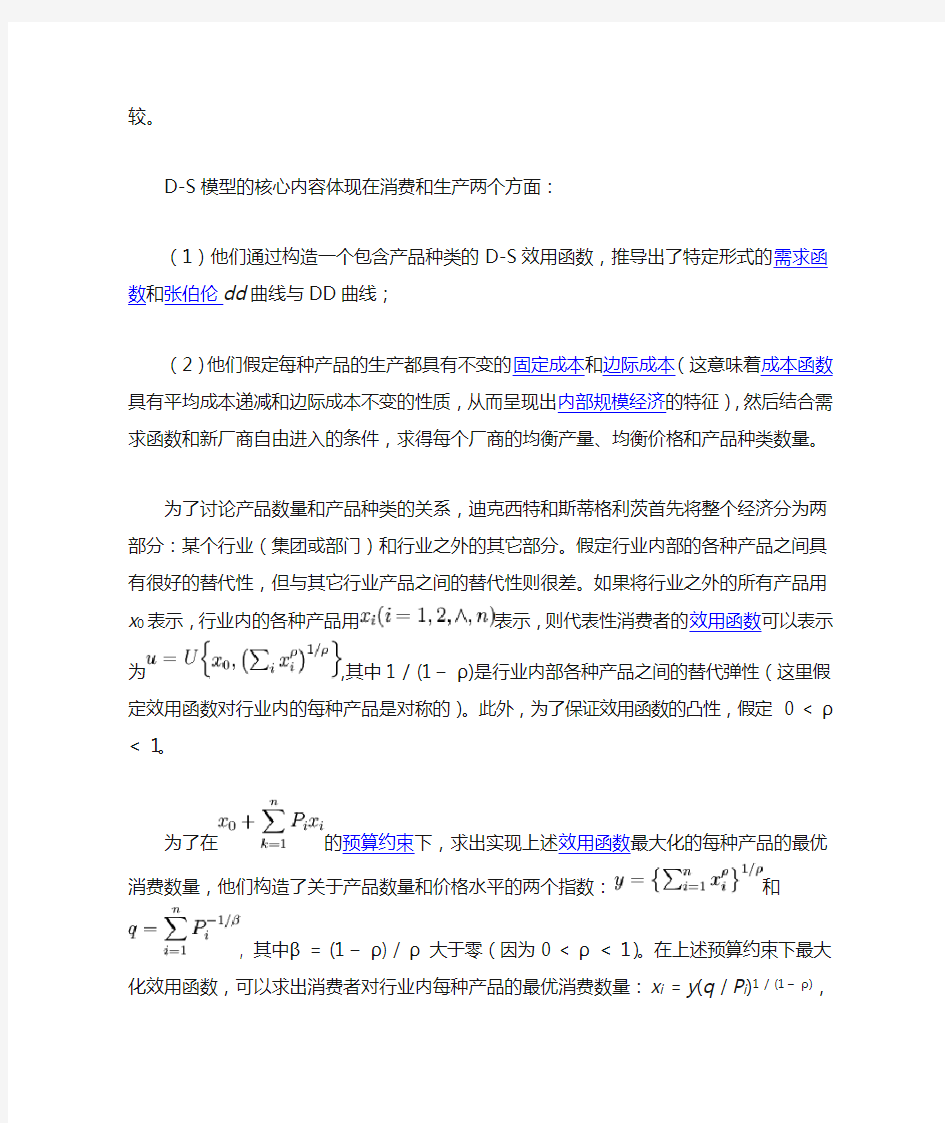
为了讨论产品数量和产品种类的关系,迪克西特和斯蒂格利茨首先将整个经济分为两部分:某个行业(集团或部门)和行业之外的其它部分。假定行业内部的各种产品之间具有很好的替代性,但与其它行业产品之间的替代性则很差。如
果将行业之外的所有产品用x0表示,行业内的各种产品用表
示,则代表性消费者的效用函数可以表示为,其中1 /
(1 ?ρ)是行业内部各种产品之间的替代弹性(这里假定效用函数对行业内的每种产品是对称的)。此外,为了保证效用函数的凸性,假定0 < ρ < 1。
为了在的预算约束下,求出实现上述效用函数最大化的每种产品的最优消费数量,他们构造了关于产品数量和价格水平的两个指数:
和, 其中β = (1 ?ρ) / ρ大于零(因
为0 < ρ < 1)。在上述预算约束下最大化效用函数,可以求出消费者对行业内每种产品的最优消费数量:x i = y(q / P i)1 / (1 ?ρ),这也就是产品x i的需求函数。
在n很大的情况下,可以忽略每种产品的价格p i对价格指数q的影响,这时的需求函数就表现为张伯伦dd曲线,其需求价格弹性为
。然而,如果行业中每种产品的价格都发生变化,那么这些个别的微小效应就会变为不容忽视的较大影响,将p i对q的影响考虑进来后的需求曲线就是张伯伦的DD曲线。一般而言,dd曲线和DD曲线都是向下倾斜的,但dd曲线具有更大的需求弹性。
为了求解市场均衡时的均衡价格、均衡产量和产品种类,必须考察厂商的生产条件。假定每个厂商的成本函数都采取如下形式:C(x i) = a + cx i,其中a
为固定成本,c为不变的边际成本。为了求出市场均衡解,他们采用了利润最大化的两个条件:第一,每个厂商的边际成本等于边际收入;第二,新厂商自由进入,直至净利润恰好为零(即对第n个厂商有(P n?c)x n = a)。由于效用函数和成本函数都是对称的,因此在市场均衡时,每个厂商具有相同的均衡产量、面对同样的均衡价格。因此,根据需求函数和上述两个生产条件,可以求得均衡价格P e = c(1 + β) = c / ρ、均衡产量x e = a / βc和产品种类n。
以上内容是D-S模型的核心,也是新古典贸易理论和新增长理论予以借鉴和应用的主要方面(该模型还包括在各种情形下对市场均衡和社会最优的比较)。概括地讲,该模型的核心假定,一是构造了体现产品种类的D-S效用函数,二是假定厂商具有不变的固定成本和边际成本;求解该模型一般均衡的主要方法,是根据效用函数求出行业内各种产品的需求函数,然后结合利润最大化(边际收入等于边际成本)和自由进入(边际厂商的净收益为零)条件求得均衡产量、均衡价格和产品种类。
D-S模型的主要贡献,是为考虑产品种类的垄断竞争模型提供了简洁的分析框架。正如迪克西特和斯蒂格利茨在论文引言部分所指出的,尽管兰开斯特的产品特性法、霍特林的空间模型法、以及均方差资产选择模型也对产品种类进行了模型化,但这些间接的方法较为复杂,难以进行一般均衡分析和进一步应用。我们可以看到,在新贸易理论以及保罗·罗默(1987,1990)和格罗斯曼与赫尔普曼等人的新增长理论中,D-S模型构成了基本的逻辑起点。
[编辑]
D-S模型与新贸易理论
新贸易理论的出现有现实和理论两方面的原因:从国际贸易的现实方面看,战后发达国家之间的“产业内贸易”日益构成国际贸易的主要方面,而传统的比较利益理论和要素禀赋理论不能对这一现象做出合理的解释(因为在不存在任何比较利益和要素禀赋的情况下,也可以产生大量的国际贸易);从经济理论方面看,D-S模型使得对存在内部规模经济情形下的垄断竞争的市场结构进行一般均衡分析变得简单易行。因此在该模型提出仅仅两年之后,就兴起了以克鲁格曼、埃塞尔和赫尔普曼等人为代表的新贸易理论。其中,克鲁格曼(1979)是对迪克西特-斯蒂格利茨模型最直接、最简洁的应用(只有劳动一种投入);埃塞尔(1982)则在两种投入(劳动和资本)、两个部门(小麦和制造品)的模型中,将D-S
效用函数引申为制造业部门的生产函数;克鲁格曼和赫尔普曼(1985,1989)则对新贸易理论和政策做出了比较系统的概括和总结。
克鲁格曼(1979)是新贸易理论的经典论文,几乎完全是D-S模型在国际贸易理论的直接应用。与D-S模型一样,克鲁格曼假定所有消费者具有相同的、对
称的效用函数,生产者的成本函数(只有劳动一种投入)是l i = a + βx
,其中和分别为劳动投入量和产量。克鲁格曼假定:
i
(1)产量等于消费量,即x i = Lc i;
(2)经济实现充分就业,即。结合效用最大化、利润最大化和自由进入的条件,可以求出相对价格p/w、均衡产量x和产品种类n等三个变量(对称性假设保证了每个厂商在市场均衡中具有相同的价格和产量,故可以省略下标)。其中,均衡的相对价格为p / w = β + a / x = β+ / Lc(后一个等号是因为在市场均衡中产量等于消费量),均衡产量为x = a / (p / w?β) ,产品种类为n = L / (a + βx) = L / (a + βLc)(充分就业假设和对称性假设)。
假定存在两个具有相同消费者偏好和生产技术的国家,那么根据传统的贸易理论,克鲁格曼在上述模型中描述的经济不可能产生国际贸易(只有劳动一种投
入,从而排除了要素禀赋差异的可能)。但根据上述模型,国际贸易就像一国人口的增加一样,不仅能够增加均衡产量,而且能够增加产品种类,从而使得每个国家可以从国际贸易中得到好处、并改进每个国家的福利水平。这就为“产业内贸易”现象提供了简洁但令人信服的解释。此外,新贸易理论的另一个重要代表人物埃塞尔在《现代国际贸易理论中的国内和国际规模收益》(1982)一文中,首次将D-S效用函数引申为生产函数,对第二轮新增长理论(垄断竞争框架)的兴起产生了重要的影响。总的看来,就新贸易理论的核心内容和基本政策主张而言,不论是“产业内贸易”、还是战略性贸易政策和相互倾销理论(在克鲁格曼的模型中,贸易结构或国际分工是不确定的),其理论基石都是D-S模型及其对内部规模经济和垄断竞争市场结构的一般均衡分析。
[编辑]
D-S模型与新增长理论
新增长理论的产生虽然比新贸易理论稍晚几年,但它在基本理论方面的经历非常类似于新贸易理论:它同样经历了从完全竞争的分析框架向垄断竞争、从外部性或溢出效应等外部规模经济向内部规模经济的转变过程,它同样得益于D-S 模型的启发。具体地讲,在现代经济增长理论的第一个版本新古典增长理论中,长期经济增长率严重地依赖于技术进步率,但令人遗憾的是,这种技术进步率是外生的。为了寻找经济增长的内生决定因素、并对新古典增长理论难以很好地解释的某些经验事实(如收敛和移民等)做出更合理的解释,20世纪80年代中期兴起了以罗默(1986)和卢卡斯(1988)为代表的第一轮新增长理论。它主要借助于外部规模经济(干中学、外部性和溢出效应等)和完全竞争的市场结构进行理论探索,即在整个经济呈现出规模经济、但个别厂商遵循收益递减(从而与完全竞争的市场结构相容)的框架下进行研究。罗默(1987,1990)、阿洪和豪伊特以及格罗斯曼和赫尔普曼的系列论文或著作,则开始将不完全竞争作为基本的分析框架,发起了以D-S模型为基础的第二轮新增长理论。下面以罗默为例,简要介绍该模型与新增长理论之间内在联系。
罗默(1987,1990)借用了埃塞尔(1982)发展的D-S模型生产函数,在垄断竞争的框架下考察了产品种类导致内生经济增长的内在机制。其中,在罗默所发表的《以专业化引起递增收益为基础的增长》(1987)的论文中,最终产品部门的产出仅是劳动和中间品投入的函数;在《内生技术变迁》(1990)的论文中则将人力资本投入考虑进来。在罗默(1990)的模型中,存在着最终产品、中间产品和研究开发三个部门。最终产品的生产函数为
,其中Y = H Y,Y=L和
Y=x_i分别为人力资本(用于最终产品部门的部分)、简单劳动和中间品投入;研究开发部门的产出(新设计)是人力资本和知识存量的函数
;中间品部门则利用某种资源(如资本)和新设计,生产作为最终产品部门投入的中间品,假定每生产单位的中间品需要η单位的资本。
不必详细推导均衡的求解过程,我们就可以发现该模型的内生增长含义。由于中间品的生产及其在最终产品的生产函数中是对称的,因此均衡条件下每种中间品的产量应该是相同的,记之为。假定研究开发部门决定的中间品种类为
A,那么必有,即。将代入最终品部门的生产函数可
得。该生产函数表明,即使人力资本H
、劳动L和资本K三种投入保持不变(与新古典假设一样,这些投入对产出Y
是一次齐次的),中间品种类N的不断增加就可以导致产出的持续增长和社会福利的不断改善。
上述分析表明,D-S模型及其提供的分析框架在没有增加任何复杂性的情况下,对内部规模经济现象做出了很好的理论解释。目前,它基本上已成为国际贸易理论和经济增长理论研究的标准工具。另外,正是由于迪克西特和斯蒂格利茨的这一创造性贡献,经济学家现在可以将国际贸易和经济增长放在同一个框架下进行分析,并在很大程度上将二者视为相同的经济问题(不外乎产品种类的增加和社会福利的改善)。
三维校园电子地图
三维校园电子地图(上) 访问734次 作者:李纳璺陈金龙阮方舟 1引言 随着计算机技术,特别是计算机图形学、三维仿真技术以及虚拟现实技术的飞速发展,传统的 二维电子地图被注入了新的活力,三维电子地图正成为电子地图发展的一个重要方向。传统的二维 电子地图只能以图形和符号的方式来呈现一张地图,这种方式往往不能直观清晰的表示出地图所在 位置的地理环境;采用三维电子地图的方式,建立场景的仿真模型,把现实场景进行虚拟再现,真实、互动、情节化的特点是虚拟现实技术独特的魅力所在。 如何设计一个仿真度高,并且具备虚拟漫游和智能导航的三维地图引擎,成为三维电子地图研究领域的一个热点问题。本文研究的设计的三维电子地图引擎系统,设计了模型动态加载接口,并具备智能导航和虚拟漫游引擎,实现了三维校园仿真电子地图。它为校园规划建设、游客观光导航、学校对外宣传等方面提供了一个智能化的平台,为广大系统用户提供了极大的便利。开展虚拟校园三维地图仿真引擎系统及相关课题的研究适应了信息社会发展的趋势,具有重要的理论和现实意义。 本文对从DirectX技术着手,采用Microsoft Visual C#编程语言结合三维图形开发包(Managed DirectX SDK August 2007)在.net框架中构建的三维校园电子地图程序。该程序实现了桂林电子科技大学的(东区)的三维校园电子地图的功能。除此之外,在可视化的基础上实现了一些虚拟现实的交互操作和空间分析,如:校园景物的查看、校园路径导航、三维动态漫游校园等;给需要了解桂林电子科技大学校园地理信息的用户提供了极大方便。 2 本课题研究的内容 本课题是一个使用Managed DirectX的三维图形技术实现的一个三维校园电子地图程序,该程序是在.net框架下建立完成,开发语言为当今最流行的高级语言Microsoft Visual C#。它是以桂林电子科技大学东校区为实景,进行了校园虚拟仿真,建立了具备观光浏览与智能导航为一体的多媒体三维校园电子地图程序。 本课题主要是研究了三维建模技术在程序中的导入技术、三维模型的优化、虚拟现实技术、Floyd 算法实现的智能导航技术、Alpha混合与Alpha测试技术、三维场景中的光照技术、XML技术、用户交互控件技术等等。这些技术将全部应用到三维校园电子地图程序当中,最终展示出集视觉、听觉、用户智能交互于一体的校园仿真三维地图。 3 开发环境与相关技术简介 3.1 Managed DirectX与托管代码版DirectX 9.0语言支持 (1) Managed DirectX DirectX 是一系列低级的应用程序接口(APIs),它用于创建游戏和其他高执行效率的多媒体程序。它包括对高效的2D和3D图形、音效和音乐、输入设备、力反馈设备、多媒体流和多人游戏的网络通信程序。三维校园电子地图程序的三维环境漫游引擎的构建就是使用Managed DirectX 9.0的图形 处理技术来完成的。 (2) 托管代码版DirectX 9.0语言支持 在DirectX 9.0下,开发者在使用托管代码的时候,能够利用DirectX的多媒体功能和硬件加速。托管代码版DirectX 9.0允许访问大多数原始的非托管DirectX功能。下面是被DirectX 9.0和DirectX 9.0 SDK支持的托管代码语言:
Jack 人体仿真及建模软件介绍
人机功效评价解决方案 Jack 人体仿真及建模系统 Jack是一个人体建模与仿真软件解决方案,帮助各行业的组织提高产品设计的工效学因素和改进车间的任务。jack最初是由宾夕法尼亚大学的人类模型和模拟中心(Center for Human Modeling and Simulation at the University of Pennsylvania)开发,目前是西门子PLM旗下的一员。使 用Jack可以: 1、建立一个虚拟的环境 2、创建一个虚拟人 3、定义人体大小和形状 4、把人放在环境中 5、给人指派任务 6、分析人体如何执行任务 从jack获得的信息可以帮助您设计更安全、更符合人体工程学的产品、工作场所和更快的流程和使用更低的成本。 第1步:建立一个虚拟的环境 除了人体建模之外,jack还是是一个功能强大的互动性、 实时视景仿真解决方案。您可以导入CAD数据或从草图
开始建立模型,在周围的环境中移动物体,交互式地改变相机的视图和创建特殊效果,以提高您“现场”的真实性。 导入CAD模型-jack可以导入基于VRML,IGES,立体(STL)的和inventor (iv)文件格式的3D 图形数据。此外,软件提供了减小CAD数据的功能来优化模型,用于实时仿真。OpenGL Optimizer的使用可以在不损害视频保真度的情况下相当程度的减少模型的棱角。 在jack中创建几何图形-jack允许您从草图开始建立模型,用于概念设计。您可以创建简单的几何图形,如立方体、球、圆柱、圆锥和圆环。熟练操作后,您可以合并这些简单的图形成为更加复杂的部件,如机械工具和车辆。jack还提供了一套基本的工具(锤子,钳子,梯子,棘轮,锯,螺丝刀和扳手)。 给您的环境一个真实的外观-jack的视图,纹理映射和照明功能,帮助您赋予您的虚拟环境更有说服力的外观。 在jack中可以很容易地改变视图,通过鼠标按钮可以基于一个参考点,水平或垂直或放大“相机”。此外,您也可以将视图参考点定位到指定的对象上,为某些对象加上相机,如人的眼睛,并建立剖视图。使用纹理映射,基础的图像文件,如云彩、公路、工厂内部或机器的控制面板可用于增加视觉细节场景,而不会增加额外的几何形状。jack的经典照明能力,可以帮助您突出环境中的区域和加强场景的真实感。
毕业设计虚拟校园三维模型设计制作
目录 摘要 (2) 前言 (4) 1.论文的选题背景与研究意义 (5) 1.1选题的背景 (5) 1.2论文的研究意义 (5) 2.当前虚拟现实系统的主要问题与发展方向 (5) 2.1虚拟现实系统中场景建模的问题 (5) 2.2虚拟现实系统中场景绘制的主要问题 (6) 2.3虚拟现实系统今后的发展方向 (7) 3.虚拟校园系统的三维建模 (7) 3.1场景的建模技术 (7) 3.1.1基于图形绘制的建模技术 (7) 3.1.2基于图像的建模绘制技术 (8) 3.1.3基于图形与图像的混合建模技术 (9) 3.2层次细节模型生成和绘制 (9) 3.3系统的建模方法 (10) 4.建模设计与数据表现 (11) 4.1三维建模的原则 (11) 4.2实体建筑的构建 (12) 4.2.1构建实体建筑的基本原理 (12) 4.2.2实体建筑的构建 (12) 5.建模中常见的问题 (16) 5.1过分强调细节 (16) 5.2实体拼接组合的位置关系不正确 (16) 5.3存在冗余多边形 (17) 结束语 (18) 参考文献 (19) 致谢 (20)
摘要 随着计算机技术、通信技术及其他相关技术的飞速发展,虚拟现实的仿真技术也日益成为当前研究的热点。通常传统的校园三维立体图内容单一,缺乏实体感,实用价值受到限制,而虚拟校园是将虚拟现实技术引入到“数字校园”的研究中,为校园的规划和设计提供了一种全新的手段。虚拟校园三维模型不仅能自然、真实、形象地表达现实世界的对象,而且拓展了现实校园的时间和空间维度,从而扩展其功能。 本文在分析了虚拟现实(Virtual Reality)技术的概念、基本特征及其在国内外发展应用情况的基础上,结合校园的具体情况,构建了基于Web的VCS虚拟校园系统采用图形与图像混合建模技术,实现了VCS虚拟校园系统的三维建模,并对虚拟世界中复杂物体建模技术进行了探索,总结出了树木、花草等复杂对象建模的一般方法,分析并解决了几何体的纹理映射问题,极大地减少了场景制作的工作量。 关键词:虚拟校园,三维建模,
仿真软件promodel实验教程全解
第一章promodel简介 promodel 是一套功能相当强且容易使用的数据及图型导向系统仿真软件,它提供模块(module)的观念及操作方式让使用者可弹性的设计多种生产系统并进行仿真及分析。从小型化工厂(small job shops),大型工厂生产(large mass production)及先进的柔性弹性制造系统(flexible manufacturing system)皆可容易的规划及模拟。 Promodel系统中提供使用者人性化的操作接口环境。只要利用鼠标或键盘根据功能项目选择所需的构建工具(location & resource)、工作组件(part)及操作设定(operations),就可以不需撰写任何程序(此乃相对于一些高阶仿真语言如SLAM等而言),而完成一系统仿真的环境。另外软件更提供使用者可测试追踪(trace)系统内每个操作步骤、每个工作站、工作母机执行的情形。因此使用者在开发中即可方便的进行测试与除错,并于完成是可动态的撷取其所需点的使用情形。 因此,哪怕系统大到2000格操作机、工作站及几千几百的操作流程都能在极短的时间内完成开发、测试的工作或根据统计的数据调整系统内各资源的工作量及操作速度等设定参数,以达到系统所设定目标之最佳化。 在定义整个系统的输入输出因子、组装、包装、加工等作业流程,甚至流程的逻辑及运作优先规则时,都能借着设定参数或利用条件变量而弹性调整,也可以利用外在的程序语言控制,来改变系统的状态。例如:在仿真整个工厂的生产流程中:人员、机器、物料、无人搬运车(AGV)、夹具、机器手臂(robot)、输送带(conveyor),都能利用系统提供的传输模块以设定其速度、容量、加速度、运作顺序、方向等。 在规划设定好系统后,于仿真执行前,promodel会先行测试系统,检查各相关工作站输入、输出是否平衡。假如有忘记设定的容量、速度等,系统都能自动帮使用者假设并询问意见,如果不满意可以再修改。真正在模拟的时候又可随时观察各资源(resource)使用情形。使用者可追踪系统运作流程,随时中断仿真,并藉系统仿真后,所产生的运作过程统计数据,统计各工作站、资源使用率等。此外promodel也提供简单且易读的统计图、统计报表文件,因而可方便的了解全部资料利用的情形。一些常见的promodel应用包括:1.产能规划 2.瓶颈分析 3.厂房布置 4.生产排程 5.“日本JIT”系统规划 6.生产周期分析 此外promodel 又可让设计者藉调整工作站数量、速度、输入方式、输出方式(如:批次),以作整体系统的各种可能状况下的评估,以作为将来真正建造设计时的参考,使用及分析弹性相当宽广。 Promodel 不仅应用于生产领域,它可以用于仿真任何一种离散时间流程系统。例如:港口、供应链系统、分销系统以及其他一些物流系统。
软件质量模型的六大特性个子特性
软件质量模型的六大特性27个子特性 一、功能性: 1、适合性:软件是否提供了相应的功能 2、准确性:软件提供的功能是否正确(用户需要的) 3、互操作性:产品与产品之间交互数据的能力,例如word对其他文档的支持能力 4、保密安全性:允许经过授权的用户和系统能够正常的访问相应的数据和信息,禁止未授权的用户访问....... 5、功能性的依从性:国际/国家/行业/企业标准规范一致性 二、可靠性:产品在规定的条件下,在规定的时间内完成规定功能的能力 1、成熟性:软件产品为避免软件内部的错误扩散而导至系统失效的能力(主要是对内错误的隔离),exception等的处理 2、容错性:软件防止外部接口错误扩散而导致系统失效的能力(主要是对外错误的隔离) 3、易恢复性:系统失效后,重新恢复原有的功能和性能的能力。 4、可靠性的依从性 三、易用性:在指定使用条件下,产品被理解、学习、使用和吸引用户的能力 1、易理解性:软件交互给用户的信息时,要清晰,准确,且要易懂,使用户能够快速理解软件。 2、易学性:软件使用户能学习其应用的能力。 3、易操作性:软件产品使用户能易于操作和控制它的能力。 4、吸引性: 5、易用性的依从性: 四、效率性:在规定台条件下,相对于所用资源的数量,软件产品可提供适当性能的能力 1、时间特性:平均事务响应时间,吞吐率,TPS(每秒事务数). 软件处理特定的业务请求所需要的响应时间。 2、资源利用性:CPU 内存磁盘IO 网络带宽队列共享内存. 软件处理特定的业务请求所消耗的系统资源。 3、效率依从性: 五、软件维护性:"四规",在规定条件下,规定的时间内,使用规定的工具或方法修复规定功能的能力 1、易分析性:分析定位问题的难易程度 2、易改变性:软件产品使指定的修改可以被实现的能力 3、稳定性:防止意外修改导致程序失效 4、易测试性:使已修改软件能被确认的能力 5、维护性的依从性 六、软件可移植性:从一种环境迁移到另一种环境的能力 1、适应性:适应不同平台 2、易安装性:被安装的能力 3、共存性:软件产品在公共环境中与其它软件分享公共资源共存的软件。 4、易替换性: 软件产品在同样的环境下,替代另一个相同用途的软件产品的能力。 5、可移植性的依从性:
网络三维虚拟校园仿真平台构建
Computer Science and Application 计算机科学与应用, 2018, 8(1), 114-122 Published Online January 2018 in Hans. https://www.sodocs.net/doc/539955205.html,/journal/csa https://https://www.sodocs.net/doc/539955205.html,/10.12677/csa.2018.81015 Construction of Web 3D Virtual Campus Simulation Platform Dabei Zhou1, Lian Duan1,2*, Meihua Huang1, Meiqi Feng1 1School of Geography and Planning, Guangxi Teachers Education University, Nanning Guangxi 2The Key Laboratory of the Ministry of Education of the Beibu Gulf Environment Evolution and Resources Utilization, Guangxi Teachers Education University, Nanning Guangxi Received: Jan. 6th, 2018; accepted: Jan. 23rd, 2018; published: Jan. 30th, 2018 Abstract Based on the technologies such as 3D visualization, computer network and so on, the establish-ment and publishment of campus indoor and outdoor integration 3D virtual simulation platform have been achieved. Through the 2D campus plan of the Guangxi Teachers Education University, combined with remote sensing image data, 3D scene is modeled according to the real campus scene layout. Campus 3D scene construction, based on CGA (Computer Generated Architecture) rule language of City Engine, has achieved the rapid generation of building models and automatic texture mapping, as well as the rapid construction of indoor scenes and pedestrians, cars, dynamic water, landmark buildings and other special models. At the same time, the multi-source spa-tio-temporal data such as camera and campus management system are connected into 3D campus platform so that the display and inquiry of the attribute information of teaching buildings and se-curity multimedia information can be achieved. In addition, the campus can be displayed in dif-ferent directions through functions such as automatic roaming. Keywords GIS, 3D Modeling, Virtual Campus, CityEngine 网络三维虚拟校园仿真平台构建 周大北1,段炼1,2*,黄梅花1,冯美琪1 1广西师范学院,地理科学与规划学院,广西南宁 2广西师范学院,北部湾环境演变与资源利用教育部重点实验室,广西南宁 收稿日期:2018年1月6日;录用日期:2018年1月23日;发布日期:2018年1月30日 *通讯作者。
三维虚拟校园模型构建研究
龙源期刊网 https://www.sodocs.net/doc/539955205.html, 三维虚拟校园模型构建研究 作者:刘燕秦建波洪智风 来源:《数字技术与应用》2011年第06期 摘要:虚拟校园的设计能够提供全方位、多方式、自由控制的场景漫游;为校园规划设计创建逼真的虚拟场景;多种校园规划设计方案的比较;不同阶段、不同时期校园发展的变化比较;满足公众参与校园规划方案的需求;实施展示规划设计方案;形成标准的三维校园信息平台,为校园管理服务。在构建虚拟校园的过程中,模型构建是基础,是建立三维虚拟校园的关键。本文以聊城大学虚拟校园的实景为研究对象,以建立聊城大学虚拟校园为目的,探讨各类三维虚拟校园模型的构建。 关键词:虚拟校园模型虚拟现实技术 中图分类号:TP3 文献标识码:A 文章编号:1007-9416(2011)06-0046-02 1、引言 三维虚拟校园作为虚拟城市建设的一部分,正倍受重视,将校园风貌用虚拟仿真实现,既可以为学校树立良好的形象,提高学校的知名度,宣传校园文化,让来访者足不出户就可浏览校园风光和有关介绍信息,体验身临其境的感受,又可以作为校园规划的辅助工具,提高校园管理的现代化水平,将其与学校的有关信息相结合后,可以提供给师生一个三维可视化的校园展示与查询环境,把学校建设成超越时空的虚拟大学。 模型构建是对校园实体对象按虚拟校园的可视化、漫游等要求进行构建的过程。在虚拟校园系统中,模型根据空间分布特性分为两大类:一类是以场为基础的对象,如地形、土壤种类分布等,这类对象在空间上连续分布,称为地形对象;另一类是以离散实体为特性的对象,如建筑物、树、电话亭、路灯等,这类对象以独立的个体存在,称为地物对象。模型构建是生成三维虚拟校园的第一步。 2、前期准备工作 建模的前期工作主要为对模型数据的搜集整理、材质及模型单位的统一。首先可以从学校相关部门如档案馆、基建处等获取校园的图纸资料,如学校的平面图,地形图文件、大比例尺航摄相片或卫星遥感图,建筑单体及校园规划的工程图纸文件;反映学校真实的景观纹理图内容包括建筑物、道路、水面、树木、草地、水体等等,需要注意选择不同的分辨率和精确度的数据和图片。在本项目中,采用了实地测量的方法进行数据的统计、记录。对每一栋楼体进行实地测量,获得数据,然后在CAD中对楼体进行平面图及立面图的绘制。
物流系统建模与仿真软件简介
一、物流系统建模与仿真软件简介 由于物流系统变得越来越复杂并且内部关联性越来越强。仿真是公司检验其物流系统及决策是否真的高效的唯一可用技术了。在设计一个新的工厂或系统,对已由系统添加新设备或重新优化,仿真都是非常必要的。同时仿真还用来提供直觉的和经验的决策支持。在当今市面上,仿真可用使用专用软件来实现。由于存在着如此多的仿真软件,如何正确的选择软件至关重要。下面列举出典型的系统仿真软件[3]。 软件名称简介 (1)20-sim 20-sim是由Twente大学控制实验室开发的运行于Windows系统下的建模与仿真软件。作为著名软件包TUTSIM的后续产品,它完全支持图形建模,让用户在直观和友善的方式对动态系统进行设计和分析,同MATLAB和Simulink可以方便的进行建模与仿真的交互。使用20-sim,我们可以仿真动态系统(例如电力、机械、水动力系统或它们的组合系统)的各种行为。 (2)arena该软件可以用来模拟服务、制造、运输、物流、供应链和其它系统。(3)Automod该软件提供了真实的三维虚拟现实动画,使得仿真模型非常用以理 解;提供了高级的特征让用户可以仿真复杂的活动,如机器人、设 备工具、生产线等的运动和转动。该软件还为用户提供了一套基于 专家系统的物料搬运系统,它是根据工业自动化的真实运行经验开 发的。这些包括输送链、自动存储和检索系统,桥式起重机等。(4)Awesim Awesim提供生产系统动态模型的仿真机。动画使用图形界面构建, 用户可以对交互式仿真进行特定的控制。 (5)Easy5由波音公司开发的用来模拟和仿真包含水力、风力、机械、热、电 子和数字等子系统的动态系统软件包。包括了一整套控制系统建 模、分析和设计功能。 (6)Idef该软件是一种流程图析软件,可以非常容易的适用流程图来绘制和 表述流程。它能够提供比传统流程图更多的信息。流程中包含的流 程、流程约束、人和其他资源能够被整合到一起。 (7)Intrax该软件能够提供许多被建模和仿真实际流程的管理决策。它能够被 用来执行战略(同战略视图,同步价值链视图相符合的现实),流 程改善(工序改善、生产力改善、节约循环时间),同步价值链(动 态视觉,同步约束)和日常运作(可对比的运作替代方案,短期变 化影响力的检验)等的模拟和仿真。 (8)Manufacturing Engineering 该软件提供离散仿真功能来解决制造问题和设计制造方案。它在广阔的应用领域中预测产出率,人工和其他的绩效。 (9)Matlab该软件是组合的数字计算、高级图形技术和可视化、高级编程语言 的集成计算机算环境。Simulink式用来对动态系统进行建模、仿真 和分析的交互式工具。它可以构建图形化的结构图,模拟动态系统, 评估系统绩效和精炼设计。 (10)Modsim该软件可以用来仿真像港口,铁路网和航空管制等的管理模型。还 可以用来仿真制造系统。 (11)Promodel该软件可以对制造系统、仓储系统和物流系统的评估、规划或重新 设计进行仿真。典型应用包括精益制造的实施,周期事件的降低, 设备投资决策,产出率和能力分析,识别和排除瓶颈,资源分配等。
仿真模型
(5)调查、搜集有关资料。系统动力学模型被认为是真实系统的“实验室”,要想通过模型模拟和剖析真实系统,获取更丰富、更深刻的信息,进而寻求解决问题的途径,“实验室”的建立是至关重要的。而要建好“实验室”,就必须在认真调查研究的基础上,花大力气搜集、完备各种资料。毫无疑问,为使模型更真实地反映系统,收集的资料应越多越好。但是,要强调的是,资料搜集工作必须紧紧围绕着研究目的进行,如果偏离了研究目的,即使资料再多也是徒劳的,而且还会给资料的筛选带来许多困难。 3-2-2-2构建模型 模型的构建,是系统动力学研究、解决问题的关键性的一个步骤。系统动力学模型的建造,一般包括如下两个相互联系的工作环节。 (1)分析系统结构。在需要研究的问题已经明确、系统中的重要变量与参考模式已经确定、资料搜集工作也已基本完成之后,就要研究系统及其组成部分之间的相互关系、系统中的主要变量与其它有关变量之间的关系、分析系统的结构。为了使建模工作一开始就能把握整个研究过程的方向,建模者首先要分析系统整体与局部的关系,然后分析变量与变量之间的关系,最后把这些关系转化成反映系统结构的因果关系图或流图。 因果关系图,是反映变量与变量之间因果关系的示意图。其中,变量之间相互影响作用的性质用因果关系键来表示。因果关系键中的正、负极性分别表示了正、负两种不同的影响作用。因果关系键把若干个变最串联后又折回源发变量,这样便形成了一个反馈回路。对于反馈回路,也有正、负极性之区别。如果沿着某一反馈回路绕行一周后,各因果关系键的累计效应为正,则该回路为正反馈回路,反之则为负反馈回路。正反馈具有自我强化的作用机制,负反馈则具有自我抑制的作用机制。 因果关系图虽然能够描述系统反馈结构的基本方面,但不能反映不同性质变量的区别。譬如,状态变量是系统动力学中最重要的变量,它具有积累效应。正是由于状态变量的积累效应,才使系统动力学模型的计算机模拟成为可能。为了进一步揭示系统变量的区别,分别用不同的符号代表不同的变量,并把有关的代表不同变量的各类符号用带箭头的线联结起来,便形成了反映系统结构的流图。 系统动力学认为,系统中包含连续的、类似流体流动与积累的过程。我们可以将这个过程用流图来表示。例如,图3.2是一个表示系统中兔子数量变化的流图。流图中的未成年兔和成年兔是状态变量,表示其是一个积累变量;兔出生率、成熟率和兔死亡率均为速率变量,随着时间的推移,它们使相应的状态变量的值增或减;图中云状的符号表示源与漏,两者都是抽象的概念,代表输入与输出状态的一切物质,在这里,它们表示此模型不考虑小兔的来源与老兔的去向,把它们都放到界限之外。 18 对于复杂的流图,回路中还存在其他变量,这些变量能够帮我们建立状态变量、速率变量等变量之间的联系,我们称其为辅助变量。 (2)建立DYNAMO方程。在DYNAMO模型中,主要有六种方程,其标志符号分别为:L状态变量方程; R速率方程;
MATLAB软件应用及仿真设计
电气专业方向综合课程设计任务书
目录 1.单相半波可控整流系统 (1) 1.1晶闸管的仿真 (1) 1.1.1晶闸管模型 (1) 1.1.2晶闸管参数及其设置 (1) 1.2单相半波可控整流电路的仿真 (2) 1.2.1电路图及工作原理 (2) 1.2.2建立仿真模型 (2) 1.2.3模型参数简介与设置 (3) 1.2.4 仿真结果 (5) 2.晶闸管三相桥式整流系统的仿真 (9) 2.1电路图及工作原理 (9) 2.2建立仿真模型 (9) 2.3模型参数简介与设置 (10) 2.4仿真结果 (12) 3.降压斩波电路(Buck变换器) (14) 3.1可关断晶闸管(GTO)的仿真 (14) 3.1.1可关断晶闸管模型 (14) 3.1.2可关断晶闸管参数及其设置 (14) 3.2 Buck变换器的仿真 (15) 3.2.1电路图及工作原理 (15) 3.2.2建立仿真模型 (15) 3.2.3模型参数简介与设置 (16) 3.4 仿真结果 (17) 4.升压斩波电路(Boost变换器) (18) 4.1绝缘栅双极型晶体管(IGBT)的仿真 (18) 4.1.1绝缘栅双极型晶体管模型 (18) 4.1.2绝缘栅双极型晶体管参数及其设置 (18)
4.2 Boost变换器的仿真 (19) 4.2.1电路图及工作原理 (19) 4.2.2建立仿真模型 (19) 4.2.3模型参数简介与设置 (19) 4.3仿真结果 (20) 5.相位控制的晶闸管单相交流调压器带系统的仿真 (21) 5.1电路图及工作原理 (21) 5.2建立仿真模型 (21) 5.3模型参数设置 (21) 5.4 仿真结果 (22) 6.课程设计总结 (24) 参考文献 (25)
容错控制
容错控制知识 一知识点 1冗余:多余的重复或啰嗦内容,通常指通过多重备份来增加系统的可靠性。 2冗余设计:通过重复配置某些关键设备或部件,当系统出现故障时,冗余的设备或部件介入工作,承担已损设备或部件的功能,为系统提供服务,减少宕机事件的发生。 3冗余设计常用方法有硬件冗余、软件冗余(主要指解析冗余)、功率冗余。 3.1硬件冗余方法是通过对重要部件和易发生故障的部件提供备份,以提高系统的容错性能。软件冗余方法主要是通过设计控制器来提高整个控制系统的冗余度,从而改善系统的容错性能。硬件冗余方法按冗余级别不同又可分为元件冗余、系统冗余和混合冗余。元件冗余通常是指控制系统中关键部件(如陀螺仪和加速度计等)的冗余。 (l)静态“硬件冗余” 例如设置三个单元执行同一项任务,把它的处理结果,如调节变量相互比较,按多数原则(三中取二)判断和确定结构值。采用这种办法潜伏着这样的可能性: 有两个单元同时出错则确定的结果也出错,不过发生这种现象的概率极小。 (2)动态“硬件冗余” 即在系统运行之初,并不接入所有元件,而是留有备份,当在系统运行过程中某元件出错时,再将候补装置切换上去,由其接替前者的工作。这种方法需要注意的问题是切换的时延过程,最好能保持备份元件与运行元件状态的同步。 3.2软件冗余又可分为解析冗余、功能冗余和参数冗余等,软件冗余是通过估计技术或软件算法来实现控制系统的容错性, 解析冗余技术是利用控制系统不同部件之间的内在联系和功能上的冗余性,当系统的某些部件失效时,用其余完好部件部分甚至全部地承担起故障部件所丧失的作用,以将系统的性能维持在允许的范围之内。 冗余技术在某种程度上能提高DCS 本身的可靠性和数据通信的可靠性, 但对于整个闭环系统来讲,系统中还包含传感器,变送器,和执行器等现场设备,他们往往工作在恶劣的环境下,出现故障的概率也比较高,软硬件冗余一般无能为力,我们要采用容错控制来提升系统稳定性。 4 容错控制指控制系统在传感器,执行器或元部件发生故障时,闭环系统仍
基于SketchUp的三维校园模型绘制方法探讨
基于SketchUp的三维校园模型绘制方法探讨 发表时间:2014-11-25T10:41:22.437Z 来源:《价值工程》2014年第5月中旬供稿作者:赵哲 [导读] 当前,国内高校日益重视校园生活的数字化、信息化管理[1],随着虚拟校园的建设,对三维实体的图形图像处理及模型建立的研究也越发重视。 赵哲 ZHAO Zhe;王晓轩 WANG Xiao-xuan (广东工业大学华立学院,广州 511325) (Huali College,Guangdong University of Technology,Guangzhou 511325,China) 摘要:绘制建筑物模型的前提是构建绘图思维,利用立面绘图简约建模、立面绘图精确建模、几何组件建模和分层叠置建模的绘图方法,可将SketchUp平台提供的绘图命令较好的融合。本文结合三维校园模型的建立过程,探讨这几种绘图方法在实际操作中的应用,通过实例展现不同的绘图思维和方法所制作的模型效果。 Abstract: The premise of building construction is drawing thinking. By the method of drawing elevation drawing simple modeling, accurate modeling, drawing geometry facade component modeling and layered modeling, the SketchUp platform provides the drawing commands. Based on the process of 3D campus model, application of the mapping method in the actual operation of the model, show the effect drawing thinking and different methods of examples. 关键词: SketchUp;绘图思维;绘图方法 Key words: SketchUp;drawing thinking;drawing method 中图分类号:TP391 文献标识码:A 文章编号:1006-4311(2014)14-0182-02 引言 当前,国内高校日益重视校园生活的数字化、信息化管理[1],随着虚拟校园的建设,对三维实体的图形图像处理及模型建立的研究也越发重视。本文基于广东省大学生创新训练项目阶段性成果,以广东工业大学华立学院为例,在未获取CAD等图集数据情况下,探讨利用SketchUp软件,在建模过程中的绘图思维和方法。 1 立面绘图法 1.1 简约模型绘图方法 1.1.1 绘图思维构建目前诸如房地产楼盘、城市建筑群等具有快速建模要求的模型展示,普遍采用简约建模,也称为建立粗模。简约模型绘图思维,是根据模型使用的实际情况构建,例如在短时间内绘制整个校园建筑物模型,绘图思维是以高度不一的规则几何体表示实体模型外壳,通过纹理映射对几何体进行贴图处理。这种模型绘图思维简单,在大规模的三维模型建立中使用广泛。 1.1.2 绘图数据类型在缺少校园图集数据的情况下,建模数据一般采用相对数据。校园主体建筑物简约建模的主要数据包括建筑物楼高、长度和宽度值,以及建筑物全景图片。 1.1.3 绘图关键技术立面绘图法中,简约模型绘制的实质就是通过多个面域的创建,快速建模。建立高度不同的立面,利用SketchUp 推拉工具,在同一场景中实现多个规则几何体的建立,如图1所示。然后将处理过的建筑物全景图片对建筑物进行纹理贴图。 1.2 精确模型绘图方法 1.2.1 绘图思维构建任何一个常规的建筑物体,都是以其四个面给予人们第一视觉印象,立面绘图法的精确模型绘图思维,是通过对建筑物四个立面进行单独的绘制,最后拼合面域,构成闭合的整体。这种思维模式,适用于立面简洁,面上线状清晰的建筑物。 1.2.2 绘图数据类型校园主体建筑物精确建模的主要数据包括建筑物楼高、长度和宽度值、建筑物全景图片以及建筑物立面特色构件的尺寸和图片。通过对特色构件的图集数据采集,能够逼真还原建筑物立面效果的展示。 1.2.3 绘图关键技术以广东工业大学华立学院第一饭堂建模为例,通过对建筑实景的观察,饭堂的面域基本呈前后对称,左右对称,立面构件简单,立面给人以简洁的视觉印象,建模中只需构建两个立面。 以侧立面为例,根据饭堂高度和宽度的相对数据值,构建面域,面域成组;根据建筑物全景图,对整个立面进行多面域的划分;根据特色构件(指窗体和承重柱),可以在划分后的面域上直接进行绘图,如图2所示。 要强调的是,目前利用SketchUp平台进行三维数字校园的建设处于探索阶段,特别是基于GIS软件对SketchUp模型的导入并不是很方便,在SketchUp平台中,采用立面绘图法,常规的绘图思维是每一个面域构建一个组,方便后期修改,但是这样的做法会使得GIS软件对模型信息的读取不全面,导致模型在GIS软件中出现构件分离,建议在立面绘图时,对于简洁立面,可以进入面域组进行编辑。一个侧立面的绘制基本完成后,通过镜像就可以在SketchUp平台中完成饭堂两个侧立面的绘制。类似的方法,可以完成饭堂前后立面的绘制,将四个立面进行面域拼接,最终完成一个精确的饭堂外观模型。 2 几何组件绘图法 2.1 绘图思维构建由于建筑物一般为对称的平面形式,立面门窗也比较统一,类型简易,外墙饰面材质变化较少,可将建筑物拆分为几个部分进行建模[2]。与利用平面图集数据进行建模的方法不同,几何组件绘图法绘图思维是将建筑物拆分成2个或者2个以上的几何构件,分别建立成组,利用组件简化重复形状的构建[3],然后进行拼合,完成建筑物的模型制作。这种绘图思维,可以形象的比喻成“堆积木”,适用于绘制对象复杂,构成组件较多的模型制作,特别是建筑物的主体构件,一般又由小构件组成,使用几何组件绘图法可以较快捷地完成主体构件的绘制。 2.2 绘图数据类型校园主体建筑物几何组件建模的主要数据与前面提到的几种绘图数据最大的不同,是几何组件绘图需要对建筑物进行分解,不同的绘图人员有不同的空间思维,通过这种无形的空间几何数据来完成“积木”的堆叠。 2.3 绘图关键技术对于走廊、阳台、护栏、门厅等区域,只要配合已有的简单几何知识,再进行一些细致的处理即可,就可以得到一栋建筑物的初始模型[4]。以广东工业大学华立学院学生活动中心的主体构件为例,如图3所示。通过对实体建筑的分解,在SketchUp中建立多个几何构件,通过“堆积木”的方式完成主体构件绘制。 3 分层叠置绘图法 3.1 绘图思维构建一般的建筑物除首层以外,2层以上楼层建筑风格基本一致,对于需要绘制内部构造的建筑物,分层叠置绘图思维
GeoDict软件仿真流1
GeoDict软件仿真流程简介 中国北方车辆研究所卢进军整理 2012年4月 GeoDict软件仿真过程包括下述几步: 1.明确仿真条件:确定仿真模型边界条件,如流速、粒子直径和质量分布 等,建模之前应该明确。了解仿真介质的化学特性,例如粒子与仿真介质的粘结力等。 2.构建模型,即构建过滤介质或者过滤单元的几何模型,并对模型进行几 何编辑。 3.计算气体流场:获得初始压力降、透析度等过滤材料技术参数。 4.加粒子(应用FilterDict模块)计算粒子的运动与分布:计算粒子通过过程 及分布状态。 5.计算模型过滤效率及压力降。 6.通过计算结果改变模型参数,改进几何模型,重新进行2~5步。 具体流程如下图1所示:
图1 仿真流程图 下面分步骤进行说明: 1.明确仿真条件 基于我们专业的特点,在进行过滤材料仿真计算之前,应该明确一些仿真模型边界条件,如进口或出口流速、粒子直径和质量分布等仿真输入,这样在仿真过程中才能够做到有的放矢。同时针对该软件的特点,作为微观仿真过滤材料的工具,我们在仿真计算前也应该适当了解仿真介质的化学特性,例如粒子与仿真介质的粘结力、粒子在这种材料的透过率等。 2.构建模型 在培训中,我们主要学习了GeoDict两种基本建模方法,它是由两种模型来实现的,第一种方法是直接纤维建模,通过FiberGeo模块来实现。其建模界面如下图2所示: FiberGeo模块是建立在设计人员对纤维材料形成过程与结构构造非常了解的基
础上的,主要适用于纤维材料开发人员,而我们专业定位不在这一点上,故这种建模方法我们一般不采用。 第二种建模方法是我们主要采用的方法,GeoDict有一个模块是模块是ImportModule,该模块可以导入图片文件,例如.jpg文件,如下图3所示,而这里的图片文件就可以是我们用电镜拍摄的过滤介质单元的电镜照片,例如图4所示。 图3 ImportModule中导入图片
正向仿真模型与反向软件ADVISOR的集成开发
2007年(第29卷)第10期 汽 车 工 程A uto m otive Eng i neer i ng 2007(V o.l 29)N o .10 2007197 正向仿真模型与反向软件ADV IS OR 的集成开发 原稿收到日期为2006年7月25日,修改稿收到日期为2006年11月24日。 曾小华1 ,王庆年2 ,李 胜3 ,王伟华 2 (11吉林大学,汽车动态模拟国家重点实验室,长春 130025; 21吉林大学汽车工程学院,长春 130025; 31一汽解放青岛汽车厂,青岛 266043) [摘要] 混合动力汽车仿真软件A DV IS OR 是一种反向仿真软件,介绍在ADV ISOR 2002平台下如何通过修改进行正向仿真软件的开发,并嵌入到其GU I 平台下进行仿真。仿真结果表明,在ADV ISOR 平台下可以进行正向模型的仿真,这对实际混合动力控制策略的开发具有重要意义。 关键词:ADV I SOR;混合动力汽车;控制策略;正向仿真 D evel op m ent of For w ard S i m ulati on M ode l i n ADV IS OR2002 Zeng X iaohua 1 ,W ang Q ingnian 2 ,L i Sheng 3 &W ang W eihua 2 11J ili n Un i v e rsit y,S t a t e K e y La boratory of Au to m obile Dyna m ic a lS i mu l a tion,Changchun 130025; 21Colle g e of Auto m obile Eng i neering,Jilin Universit y ,Chang c hun 130025; 31Q i ngdao Au to Fa ctory o f FAW J i efang,Qingd ao 266043 [Abstract] A sche m e for u tilizing t h e reverse soft w are ADV ISOR to conduct for w ar d si m ulati o n is presented i n this paper .Spec ificall y ,t h e for w ard si m u lation m odules i n ADV ISOR2002are m odified and then e m bedded into its graphic user i n terface (GU I)p latfo r m so that the for w ard si m u lati o n can be perfor m ed.The resu lts show that the sche m e is feasi b le ,hav ing great sign ificance for the developm en t of rea l contro l stra tegy for hybrid electric veh icle . K eyw ords :ADV ISOR ;Hybrid electric vehicle ;Contro l strategy ;For w ard si m ulation 前言 混合动力汽车在节能和降低排放方面的优越性在国内外引起了一个新的研究热潮 [1-2] 。其中仿真 软件的开发尤为重要,国外已经开发出很多仿真软件,其中ADV I SOR 是一种比较优秀的车辆研究分析工具。它可用于车辆传动方案的性能分析 [3] 。 ADV I SOR 软件也有其自身的缺点,如它只适合于单轴驱动车辆的仿真。由于ADV ISOR 软件代码开放的特点,文献[4]已对其进行二次开发,以嵌入双轴驱动模块库用来补充对四轮驱动汽车的仿真。另外ADV ISOR 是一反向仿真软件,和实际课题的控制思想有很大的差别,因此文献[5]开发了一正向仿真模块,并同时开发了用来嵌入该仿真模块的GU I 平台C H E V 2002,从而对整车进行性能仿真。C H E V2002和ADV I SOR 相比,其代码不够开放,不 易增加多种模块,并且它只是用加速踏板和制动踏 板作为输入,不能对各种工况进行仿真。因此,文中利用ADV I SOR 本身的代码开放性及其操作方便的特点,对原正向仿真模块进行修改,并嵌入到ADV I -SOR 平台中,让其参与各种工况的仿真,同时能够对控制策略进行考察研究,而这种控制策略与实际调试整车及试验台架的控制策略相同,所以具有重要的实际意义。 1 正向和反向仿真软件的特点 目前混合动力汽车仿真有两种基本方法,即后向仿真(backw ard -fac i n g veh icle si m u lation)和前向仿真(for w ard -faci n g veh icle si m u l a ti o n),分别如图1和图2所示。国内也称后向仿真为/逆向0或/反向0仿真,称前向仿真为/正向0仿真 [6] 。 国内应用最为普遍的混合动力汽车性能反向仿