11 ADAMS_CAR模块详细实例教程(整车仿真分析篇)

11整车仿真 (234)
11.1整车装配模型 (234)
11.2整车仿真 (235)
11.3后处理曲线读取 (237)
11.4动画演示 (237)
11.4录制动画演示 (241)
11.5整车仿真调试 (241)
附例 (242)
233
《整车仿真分析篇》
11整车仿真
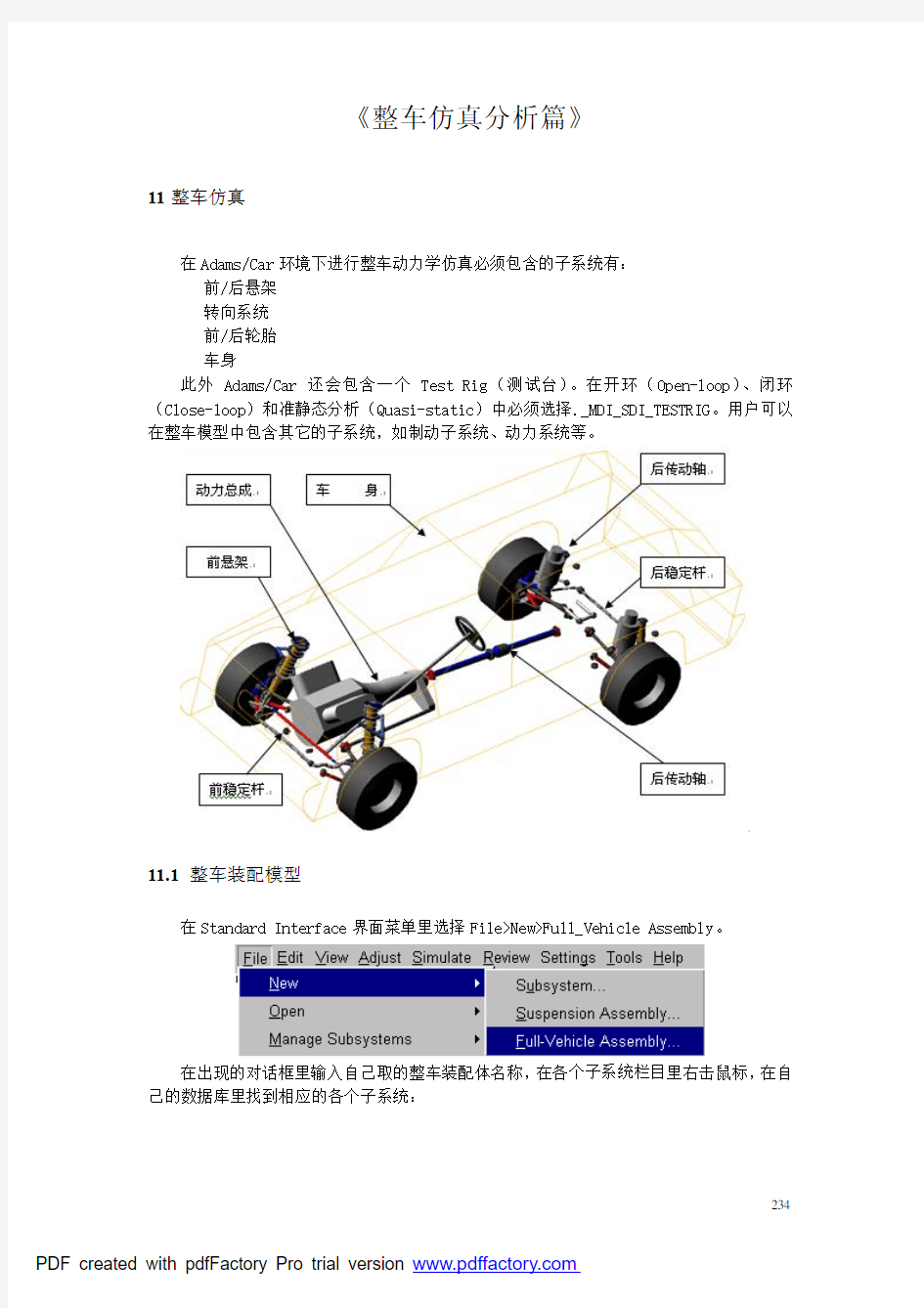
在Adams/Car环境下进行整车动力学仿真必须包含的子系统有:
前/后悬架
转向系统
前/后轮胎
车身
此外Adams/Car还会包含一个Test Rig(测试台)。在开环(Open-loop)、闭环(Close-loop)和准静态分析(Quasi-static)中必须选择._MDI_SDI_TESTRIG。用户可以在整车模型中包含其它的子系统,如制动子系统、动力系统等。
11.1整车装配模型
在Standard Interface界面菜单里选择File>New>Full_Vehicle Assembly。
在出现的对话框里输入自己取的整车装配体名称,在各个子系统栏目里右击鼠标,在自己的数据库里找到相应的各个子系统:
234
235
点击OK ,如图所示:
本例分析以双移线仿真为例,没有添加动力总成部分。
11.2整车仿真
从菜单选择Simulation>Full_Vehicle Analysis>Course Events>ISO Lane_Change 。
设定对话框如图所示:
点击OK,如果运算成功的话信息窗口如下:
236
11.3后处理曲线读取
方法和步骤请参照悬架分析篇
11.4动画演示
动画演示有两种方式:
Review>Animation Controls
1)从菜单选择Array
设定动画控制如下:
237
点击播放按钮,可以观看动画演示。
2)从后处理窗口去看,并可以保存动画演示为*.avi格式视频。
点击Review>Postprocessing Window或直接按F8,进入后处理窗口。
如图所示在后处理窗口点该下拉菜单,选择Animation。
238
在中心屏幕上右击鼠标,选择Load Animation,选择刚才的仿真x5_iso。
239
点击OK,则仿真x5_iso被载入后处理窗口。
点击中的播放按钮可以播放动画。
240
241
11.4录制动画演示
录制动画之前要先设定工作目录。从后处理菜单栏选择File>Select Directory ,选定自己的ADAMS 工作目录。
在动画控制栏里选择Record 选项,设置按默认值。
点击开始录制,再点击开始播放,动画开始后选择自己想要的截止的时机,再次
按
后录制结束。则该动画即被保存到自己设定的工作目录里。播放演示
11.5整车仿真调试
整车仿真调试需要做很多工作,比悬架仿真要有难度。在此给几点建议:
1) 首先要做好通讯器匹配工作,确保各系统必要的通讯器连接畅通,这是整车仿真成功的关键一步;
2) 最好输入实际的各部件质量和转动惯量,避免使用过小的数值,否则会导致过高的频率引入系统;
3) 衬套和弹簧数据尽量准确,如果先期没有准确数值则要尽量将刚度设置的大一些,能用刚性连接的地方尽量用刚性连接,避免系统出现错误动作,如:转向节固定衬套如果刚度过小则会出现前轮异常扭转;如果控制臂类衬套刚度不合适则会出现悬架大的变形走动;如果弹簧刚度过小则会出现整车坍塌;
4) 避免使用固定副。如果两个或多个部件能合并成一个部件的话就不要使用固定副,否则会增加系统不必要的方程数目;如果必须用固定副则要尽量建在轻质部件的质心处;
5) 避免过大或过小的数字出现在系统中,如e+23,e-20;
6) 不要让积分器越过重要事件,短时事件,如脉冲,可以通过设定最大时间步长HMAX
小于脉冲宽度来解决;尽量使用HMAX来定步长积分;
7)延伸样条曲线使其超过使用范围;
8)避免冗余约束。ADAMS会通过寻找转动枢轴来尝试消除冗余约束,而不去考虑其物理意义;
9)站在物理的立场来理解机械系统;
10)尽量引入阻尼(不能过大)到系统,这样可以消除振动;
11)模型如果要做静平衡,在初始状态所有轮胎应该轻微穿透路面;
12)在仿真不成功时要多看一下出错信息,从中发现错误所在。还有就是要多试探,多实践,从一次次尝试的过程中积累自己的经验,别人的经验自己是不会有深刻体会的。
在此推荐一个不错的网站论坛,上面有别人在使用ADAMS的过程中遇到的各种问题及解决建议,可以去浏览学习一下:https://www.sodocs.net/doc/828148300.html,。
附例:
《XXX整车分析报告》
1、分析说明
XXX后悬架为扭转梁形式,前衬套连线和后轴线形成的平面与地面的夹角分别为2.5deg 、3deg 、3.5deg,项目组提出对其进行悬架性能分析及整车稳态回转分析。本分析对XXX后悬架硬点位置的三种布置方案,分别建立了整车仿真模型并进行稳态回转分析,对各方案的分析结果进行对比。
2、整车模型建立
3、仿真结果
3.1 数据记录
根据GB/T6323.6-94规定,试验中必须测量的变量参数有横摆角速度、前进车速、和车身侧倾角,同时希望测量的变量参数有质心侧偏角、侧向加速度。
242
243
244
3.2 数据处理及结果表达
根据GB/T6323.6-94规定,对试验数据进行计算处理后(见公式2-1,2-2),分别得到车辆转弯半径比、前后轴侧偏角差值、车身侧倾角与侧向加速度的关系曲线,并通过曲线获得中性转向点的侧向加速度、不足转向度U及车身侧倾度。
245
246
247
4、分析结论
?不足转向度一般为0.4-1,车身侧倾度为0.7-1.2deg ,值越低评分越高,XXX 低于此指标;
?从这个试验仿真分析可以得出,XXX 三个方案的车辆都具有不足转向特性;
?三种方案的操稳性能差别不大。
1.4 汽车总体设计整车性能仿真与系统匹配要点
1.4 汽车总体设计整车性能仿真与系统匹配 1.4.1动力性能仿真计算 (1) 计算目的 汽车的动力性是汽车重要基本性能指标之一。动力性的好坏,直接影到汽车在城市和城际公路上的使用情况。因此在新车开发阶段要进行动力性计算,预测今后生产车型是否满足使用要求。使汽车具有良好的动力学性能. (2) 已知参数如表所示
a 设计载荷确定: 该车型设计载荷根据德国标准DIN 70020规定:在空车重量(整备质量)的基础上加上座位载荷。5座位轿车前面加2人、后排加1人,也称为半载作为设计载荷, 重量假定为68kg加上随身物品7kg,重心对于不可调整座位在R点(设计H点)前50mm,可调整作为R点前100mm处。我国标准常常规定满载作为设计工况. 对于该计算车型如采用德国标准, 则具体计算为:1070kg+3*(68kg+7kg)=1295kg b 迎风面积: 根据迎风面积计算公式:A=0.78BH确定,其中:A迎风面积,B车宽,H 车高。对于该车型而言具体计算为:A=0.78*1710mm*1427mm=1.90m2 c 传动效率: 根据该轿车的具体传动系统形式,传动系统的传动效率大体可以由变速器传动效率,单级主减速器传动效率,万向节传动效率组成。 具体计算为:95%(变速器)乘96%(单级主减速器)乘98%(万向节)=89.4%,
同时考虑到,一般情况下采用有级变速器的轿车的传动系统效率在90%到92%之间,对上述计算结果进行圆整,对传动系统效率取为90% d 滚动阻力系数: 滚动阻力系数采用推荐拟和公式进行计算: )19440/1(2 0a u f f +=, 其中: f 取为0.014(良好水泥或者沥青路面), a u 为车速km/h 。 (3) 发动机外特性曲线 i. AJR 发动机 ii AFE 发动机 图1.4.1 发动机外特性曲线 (4) 基本理论概述 汽车动力性能计算主要依据汽车驱动力和行驶阻力之间的平衡关系: j i w f t F F F F F +++= (1.4.1) 表1.4.2 各种受力名称 发 动 发动机
Xmodem协议详解以及源代码剖析
研究 Xmodem 协议必看的 11个问题 Xmodem 协议作为串口数据传输主要的方式之一,恐怕只有做过 bootloader 的才有机会接触一下, 网上有关该协议的内容要么是英语要么讲解不详细。笔者以前写 bootloader 时研究过 1k-Xmodem ,参考了不少相关资料。这里和大家交流一下我对 Xmodem 的理解,多多指教! 1. Xmodem 协议是什么? XMODEM协议是一种串口通信中广泛用到的异步文件传输协议。分为标准Xmodem 和 1k-Xmodem 两种,前者以 128字节块的形式传输数据,后者字节块为 1k 即 1024字节,并且每个块都使用一个校验和过程来进行错误检测。在校验过程中如果接收方关于一个块的校验和与它在发送方的校验和相同时,接收方就向发送方发送一个确认字节 (ACK。由于 Xmodem 需要对每个块都进行认可, 这将导致性能有所下降, 特别是延时比较长的场合, 这种协议显得效率更低。 除了 Xmodem ,还有 Ymodem , Zmodem 协议。他们的协议内容和 Xmodem 类似,不同的是 Ymodem 允许批处理文件传输,效率更高; Zmodem 则是改进的了Xmodem ,它只需要对损坏的块进行重发,其它正确的块不需要发送确认字节。减少了通信量。 2. Xmodem 协议相关控制字符 SOH 0x01 STX 0x02 EOT 0x04 ACK 0x06 NAK 0x15
CAN 0x18 CTRLZ 0x1A 3.标准 Xmodem 协议(每个数据包含有 128字节数据帧格式 _______________________________________________________________ | SOH | 信息包序号 | 信息包序号的补码 | 数据区段 | 校验和 | |_____|____________|___________________|__________|____________| 4. 1k-Xmodem (每个数据包含有 1024字节数据帧格式 _______________________________________________________________ | STX | 信息包序号 | 信息包序号的补码 | 数据区段 | 校验和 | |_____|____________|___________________|__________|____________| 5.数据包说明 对于标准 Xmodem 协议来说,如果传送的文件不是 128的整数倍,那么最后一个数据包的有效内容肯定小于帧长,不足的部分需要用 CTRL- Z(0x1A来填充。这里可能有人会问,如果我传送的是 bootloader 工程生成的 .bin 文件, mcu 收到后遇到0x1A 字符会怎么处理?其实如果传送的是文本文件,那么接收方对于接收的内容是很容易识别的,因为 CTRL-Z 不是前 128个 ascii 码, 不是通用可见字符, 如果是二进制文件, mcu 其实也不会把它当作代码来执行。哪怕是 excel 文件等,由于其内部会有些结构表示各个字段长度等,所以不会读取多余的填充字符。否则 Xmodem太弱了。对于 1k-Xmodem ,同上理。 6.如何启动传输?
汽车碰撞模拟分析流程
ANSYS 汽车碰撞分析流程Flow Chart of Auto Impact Analysis Prepared By 史志远 Date: Nov.1, 2004
汽车碰撞模拟分析流程 一、碰撞安全性试验介绍: 在汽车模拟分析的过程中,提高汽车碰撞安全性的目的是在汽车发生碰撞时确保乘员生存空间、缓和冲击、防止发生火灾等等。但是从碰撞事故分析中可知,汽车碰撞事故的形态也千差万别,所以对汽车碰撞安全性能的评价也必须针对不同的碰撞形态来进行。按事故统计结果,汽车碰撞事故主要可分为正面碰撞、侧面碰撞、追尾碰撞和翻车等几种类型。但随着公路条件的改善,正面碰撞和侧面碰撞形态成了交通事故中最常见的碰撞形式。 按照碰撞试验的目的区分,现在碰撞试验大体可以分为三类: 1)由政府法规要求的强制性试验:例如FMVSS208、ECE R94法规规定的正面碰撞 试验,FMVSS214、ECE R95法规规定的侧面碰撞试验等等; 2)由汽车制造厂自己制定的碰撞试验方法:例如用于提出改善汽车碰撞安全性的新 措施等等; 3)为消费者提供信息的试验:例如美国、欧洲等国家实施的新车评价程序(NCAP), 汽车安全法规中规定了达到政府规定的最低安全性能要求,NCAP以更高的车速 进行正面碰撞试验,以展示汽车产品的碰撞安全性能。 由于法规试验是政府强制实施的,所以,汽车碰撞试验法规是人们关注的热点。下表列出了一些美国FMVSS, 欧洲ECE的汽车被动安全性法规的试验项目。
二、人体伤害评价指标: 在碰撞试验或碰撞模拟分析的过程中,都使用了标准的碰撞试验假人,通过测量假人的响应计算出伤害的指标,用于定量的评价整车及安全部件的保护效能。 1) Hybrid III假人家族的伤害评价基准值: 下表列出了正面碰撞试验用的Hybrid III假人家族的伤害评价基准值。Hybrid III第50百分位男性假人是目前生物保真性最好的正面碰撞试验假人,另外,为了评价汽车对不同身材乘员的安全保护性能,按比例方法开发了第95百分位男性的大身材假人和第5百分位女性的小身材假人。 2)侧面碰撞假人的伤害评价基准值: 下表所示为目前使用的用于侧面碰撞用的假人SID, EuroSID-1的伤害评价基准值:
汽车整车动力性仿真计算
汽车整车动力性仿真计算 1 动力性数学模型的建立 汽车动力性是汽车最基本、最重要的性能之一。汽车动力性主要有最高车速、加速时间t 及最大爬坡度。其中汽车加速时间表示汽车的加速能力,它对平均行驶车速有着很大影响,而最高车速与最大爬坡度表征汽车的极限行驶能力。根据汽车的驱动力与行驶阻力的平衡关系建立汽车行驶方程,从而可计算汽车的最高车速、加速时间和最大爬坡度。其中行驶阻力(F t )包括滚动阻力F R 、空气阻力F Lx 、坡度阻力F St 和加速阻力F B 。 根据图1就可以建立驱动的基本方程,各车节之间的连接暂时无需考虑。而车辆必须分解为总的车身和单个车轮。节点处只画出了x 方向的力;z 方向的力对于讨论阻力无关紧要,可以忽略。 图1 (a )车辆,车轮和路面;(b )车身上的力和力矩; (c )车轮上的力和力矩;(d )路面上的力 如果忽略两个车节间的相对运动,根据工程力学的重心定理,汽车(注脚1)和挂车(注 脚2)的车身运动方程为: ∑=++--=+n j j Lx X αG G F x m m 12121sin )()( (1)
其中1G 和2G 是车节的车身重量,1m 和2m 它们的质量,α是路面的纵向坡度角,∑j X 是n 车轴上的纵向力之和,L F 是空气阻力。 由图1(c ),对第j 个车轴可列出方程 αG F X x m Rj xj j Rj Rj sin -+-= (2) j zj j xj Rj Rj Rj e F r F M φ J --= (3) Rj G 是该车轴上所有车轮的重量,Rj m 是它们的质量,Rj J 是绕车轴的车轮转动惯量之和,xj F 是在轮胎印迹上作用的切向力之和,zj F 是轴荷,Rj M 是第j 个车轴上的驱动力矩。 如果假设车轴的平移加速度Rj x 和车身的加速度x 相等,由式(1)到式(3)在消去力j X 和xj F 以后就得到方程 ∑∑∑ ∑∑=====--++-=+++n j j j zj Lx n j Rj n j j Rj Rj n j j Rj n j Rj r e F F αG G G r M φ r J x m m m 1 1 211 11 21sin )()( 引进总质量和总重量(力) m m m m n j Rj =++∑=121 mg G G G G n j Rj ==++∑=1 21 把车轮角加速度转化为平移加速度x ,即得到 ∑∑∑ ===++++=n j j j zj Lx n j j j Rj n j j Rj r e F F αG x R r J m r M 1 11 sin )( (4) 右边是由4项阻力组成,我们称之为 1)滚动阻力∑==n j j j zj R r e F F 1 (5) 令j j r e f = ,f 为阻力系数,代入式(5),则整车的滚动阻力为 zj n j R F f F ∑==1(5-1) 还常常进一步假定,所有车轮(尽管比如各个车轮胎压不同)的滚动阻力系数相等,又因为所有车轮轮荷zj F 之和等于车重G ,如果车辆行驶在角度为α的坡道上,则轮荷之和等于αcos G (参看图1) ,这样,式(5-1)可改写为 αfG F f F n j zj R cos 1==∑= 因为道路上的坡度较α不是很大,整车滚动阻力因而近似于整车车轮阻力 G f F R R =(5-2) 2)空气阻力2 a D 15 .21u A C F Lx =(6) 3)上坡阻力αG F St sin =(7) 在式(4)中的αG sin 项用以表示上坡阻力 αG F St sin =(7-1) 参看式(7)。如果我们用αtan 以及等价的值p 来取代αsin ,那么上述表达式就更为直
LWIP协议栈的分析和设计
---《计算机网络与控制》论文 LWIP协议栈的分析
摘要 近些年来,随着互联网和通讯技术的迅猛发展,除了计算机之外,大量的嵌入式设备也需求接入网络。目前,互联网中使用的通讯协议基本是TCP/IP协议族,可运行于不同的网络上,本文研究的就是嵌入式TCP/IP协议栈LWIP。文章首先分析了LWIP的整体结构和协议栈的实现,再介绍协议栈的内存管理,最后讲解协议栈应用程序接口。 关键词: 嵌入式系统;协议;LWIP;以太网 Abstract With the rapid development of internet and communication technology, Not only computers but also embeded equipments are need to connect networks. At present, the basic communication protocol using in internet is TCP/IP, it can run in different network. This paper analyses the Light-Weight TCP/IP. The process model of a protocol implementation and processing of every layer are described first, and then gives the detailed management of Buffer and memory. At last, a reference lwIP API is given. Key words: Embedded System, Protocol, Light weight TCP/IP,Ethernet 引言
汽车正面碰撞仿真建模与分析作业指导书
1 主题内容和适用范围 1.1本标准规定了零部件几何模型处理的基本方法; 1.2本标准规定了零部件有限元模型的命名方法; 1.3本标准规定了白车身与底盘有限元模型的网格划分与检测的基本方法; 1.4本标准规定了白车身与底盘有限元模型的焊点、螺栓、铆钉连接的基本方法; 1.5本标准规定了汽车正面碰撞仿真分析的基本参数设置、操作流程、评价方法。 1.6本标准适用于M1类车辆正面碰撞仿真分析。 2 引用标准 2.1 CMVDR 294 —关于正面碰撞乘员保护的设计准则 2.2 GB 11557-1998—防止汽车转向机构对驾驶员伤害的规定 3 术语 3.1整车质量—整车整备质量+两位法定假人质量 3.2 HIC—头部性能指标 3.3 ThPC—胸部性能指标 3.4 FPC—大腿性能指标 3.5保护系统—用来约束和保护乘员内部安装件及装置 4 零部件几何模型的处理 在UG中处理白车身数模,需检查各总成内部零件的干涉和各总成之间的干涉,同时对一些缺失的面和有质量问题的面进行修补。对
于对称件,可先去掉一半。具体操作可参照样车的实际结构进行必要的几何处理(见附录-1) 5 零部件有限元模型的命名方法 模型处理好后,将各零件以iges格式分别输出,并以三维数模对应的零件号命名。 6 有限元网格划分标准 6.1 整车网格尺寸规定 6.1.1 对于B柱之前的零件,单元尺寸初步定在8-12mm,可根据零件的复杂程度适当的减小尺寸,但是决不能小于5mm,其间需考虑单元的过渡(如顶盖,地板等结构),以确保网格连续、平滑、均匀、美观;对于B柱之后的零件,可适当增大网格尺寸,初步定在20-30mm; 6.1.2 对于倒角,半径小于5mm时可删去,半径在5-10mm之间时划分一个单元,半径大于10mm时划分两个单元; 6.1.3 对于孔,半径小于5mm时可删去,半径大于5mm时应保证孔边沿上至少有4个节点; 6.1.4 对于对称件,网格划分完后镜像生成完整的网格模型。 6.2 网格检查标准
100%正面碰撞分析报告
编号: - CSFX-002 100%正面碰撞分析报告 项目名称:A级三厢轿车设计开发 项目代号: CP08 编制:日期: 校对:日期: 审核:日期: 批准:日期: 2011年03月
目录 1 分析目的和意义 (1) 2 使用软件说明 (1) 3 整车参数 (1) 3.1整车参数 (1) 3.2有限元模型坐标与实车坐标对比 (2) 3.3整车及各总成有限元模型 (2) 3.4边界条件定义 (5) 4 碰撞模拟结果分析 (5) 4.1碰撞模拟总体变形结果 (5) 4.2整车速度变化 (8) 4.3碰撞模拟能量变化情况 (9) 4.4刚性墙的接触力 (10) 4.5主要吸能部件变形及吸能情况分析 (11) 4.6主要吸能部件变形图 (11) 4.7B柱下端减加速度 (14) 4.8门框变形量 (15) 4.9前围板侵入量 (17) 4.10A柱侵入量 (19) 4.11方向盘侵入量 (20) 5 总结 (20)
1 分析目的和意义 为了在汽车的设计阶段使被设计车辆更好的满足耐撞性的要求,采用动态大变形非线形有限元模拟技术,进行了CP08车型正面撞击刚性墙的仿真分析,主要是根据《乘用车正面碰撞的乘员保护》(GB11551-2003)进行的仿真模拟。GB11551的全部技术内容为强制性要求,适用于M1类车辆(M1类车辆为包括驾驶员座位在内,座位数不超过9座的载客车辆)。汽车车体结构变形特性是影响汽车安全性能的关键因素,本文通过对CP08车型模拟结果进行分析,为整车的耐碰撞性提供参考。 2 使用软件说明 在本次模拟中,主要使用了Hypermesh前处理软件和Ls-Dyna 求解器,Hypermesh是世界领先的、功能强大的CAE应用软件包,由美国Altair公司开发,目前在世界上的应用非常广泛。LS-DYNA 是一个以显式为主,隐式为辅的通用非线性动力分析有限元程序,可以求解各种二维、三维非线性结构的高速碰撞、爆炸和金属成型等非线性问题。 3 整车参数 3.1 整车参数 整车碰撞仿真模拟,必须真实的模拟实车碰撞时的状态,要模拟实车各总成之间的连接,按照其实际材料特性,密度、质量等参数进行设置。 根据项目组提供的整车零部件明细表及质量、材料特性,材料主
09_整车仿真分析及改型车性能对比_一汽轿车李胜江等
整车仿真分析及改型车性能对比 作者:李胜江 张梓蔚 王丹丹 田蜀东 (一汽轿车,长春) 摘要:本文讨论了一汽轿车股份有限公司某MT车型的动力性和经济性。在CRUISE环境下,建立该车型的整车系统模型,并对模型的关键输入参数进行了探讨和设置。根据所建立的仿真模型,对其进行了最高车速、最大爬坡度、加速性能、等速油耗的仿真计算及结果分析。通过与其试验数据作对比,仿真结果令人满意。并以此模型为基础平台车对改型车性能进行对比分析。 关键词:动力性;经济性;建模仿真 主要软件:AVL CRUISE Abstract:This article discusses the performance and fuel consumption of a MT vehicle in Faw Car Co.,Ltd.In the CRUISE environment,we establish the vehicle system model,set and discusse the key parameters of the model. According to the simulation model established,carry out the maximal speed, the climbing performance, acceleration, constant speed fuel consumption and analysis these results. Compare with the test data of this model, simulation results are satisfactory. Use this model as a platform,we established modified vehicle model,and make comparative analysis for their performance. 1 前言 汽车动力性、经济性是汽车的两个最基本最关键性能,如果汽车的这两个性能不好,将直接影响整车的质量,降低其市场竞争性,更严重者可能有安全隐患或通不过国家法规。又因为世界范围内的汽车产业激烈竞争,要求进一步降低其研发成本和缩短研发周期,这使得计算机建模与仿真技术广泛应用于汽车研发过程中。 另一方面,在整车开发过程中,动力系统和整车的匹配主导着车辆的性能,而在匹配方案较多或在方案验证阶段时,如果都试制成实车进行试验,不但成本高,带来的长周期也会严重影响新车推出市场的时机,减少销量从而削减公司利润。这就使得我们必须使用模拟仿真的方法,对新方案进行对比分析,优化设计,使整车动力性、经济性能达到最佳的统一。用最短的时间,最少的成本量,产出更符合市场需求的商品车。本公司使用Cruise软件在此方面的功能进行产品开发,收到了较好的效果。 2 CRUISE仿真软件的简述 2.1 CRUSIE软件功能和特点 CRUISE软件主要是用于仿真研究车辆动力性、燃油经济性、排放性能与制动性能的高级仿真分析软件。其可以进行发动机、变速箱、轮胎的选型及整车的匹配优化;对燃油消耗
lwip各层协议栈详解
竭诚为您提供优质文档/双击可除lwip各层协议栈详解 篇一:lwip协议栈源码分析 lwip源码分析 -----caoxw 1lwip的结构 lwip(lightweightinternetprotocol)的主要模块包括:配置模块、初始化模块、netif模块、mem(memp)模块、netarp模块、ip模块、udp模块、icmp模块、igmp模块、dhcp模块、tcp模块、snmp模块等。下面主要对我们需要关心的协议处理进行说明和梳理。配置模块: 配置模块通过各种宏定义的方式对系统、子模块进行了配置。比如,通过宏,配置了mem管理模块的参数。该配置模块还通过宏,配置了协议栈所支持的协议簇,通过宏定制的方式,决定了支持那些协议。主要的文件是opt.h。 初始化模块: 初始化模块入口的文件为tcpip.c,其初始化入口函数为: voidtcpip_init(void(*initfunc)(void*),void*arg)
该入口通过调用lwip_init()函数,初始化了所有的子模块,并启动了协议栈管理进程。同时,该函数还带有回调钩子及其参数。可以在需要的地方进行调用。 协议栈数据分发管理进程负责了输入报文的处理、超时处理、api函数以及回调的处理,原型如下: staticvoidtcpip_thread(void*arg) netif模块: netif模块为协议栈与底层驱动的接口模块,其将底层的一个网口设备描述成协议栈的一个接口设备(netinterface)。该模块的主要文件为netif.c。其通过链表的方式描述了系统中的所有网口设备。 netif的数据结构描述了网口的参数,包括ip地址、mac 地址、link状态、网口号、收发函数等等参数。一个网口设备的数据收发主要通过该结构进行。 mem(memp)模块: mem模块同一管理了协议栈使用的内容缓冲区,并管理pbuf结构以及报文的字段处理。主要的文件包括mem.c、memp.c、pbuf.c。 netarp模块: netarp模块是处理arp协议的模块,主要源文件为etharp.c。其主要入口函数为: err_tethernet_input(structpbuf*p,structnetif*netif)
汽车碰撞仿真技术
汽车碰撞安全技术 学号:2009********** 班级:2009级****** 姓名:******* 球撞板建模仿真分析实验 (一)试验目的 巩固汽车仿真分析基础知识,使对仿真分析有更深的认识,学习Hyperworks、LS-DYNA 软件基础,学习仿真分析的基本思想和基本方法步骤。 (二)试验设备 计算机、Hyperworks软件和LS-DYNA软件。 (三)试验原理 仿真分析主要分为数据前处理、后处理和分析计算等几个阶段,本实验主要通过建立球和板的几何模型、画分网格、给球和板富裕材料和截面属性、加载边界条件、建立在和条件、接触处理、定义控制卡片。删除临时阶段、节点重新排号、将文件导出成KEY文件、运营LS0DYNA进行分析仿真等步骤,模拟球撞板的过程,得出响应的仿真动画和仿真计算结果。(四)仿真步骤 1)建模过程 首先建立临时节点,并以此建立球模型和板模型。球为以临时节点为球心,5mm为半径;板距离球心的距离为5.5mm,即板和球的最小距离为0.5mm。 2)画网格 利用hypermesh画出球和板的二位网格。 3)定义模型特性 给ball和plane定义材料为20号刚体材料,其杨氏模量分别为200000和100000,泊松比均为0.3。 4)定义边界条件 将plane板上最外面的四行节点分别建成4个set。 5)建立载荷条件 定义球的位移,即给定球向板方向的距离,由此模拟球撞击板的过程。 6)定义接触 先做出两个用于接触的sagment,在这两个sagment上建立接触关系。 7)定义控制卡片 即建立Analysis-control cards (1)选择Control_Enegy,将hgen设置为2,return; (2)按next找到Control_Termination,将ENDTIM设为0.0001s,return; (3) 按next找到Control_Time_step,将DTINIT设为1*10-6s,将TSSFAC设置为0.6,点击return; (4) 按next找到DATABASE_BINARY_D3PLOT,将DT设置为5*10-6,return; (5) 按next找到DATABASE_OPTION,将MATSUM设置为1*10-6,将RCFORC设置为1*10-6,return. 8)删除临时节点 进入Geom中的temp nodes面板,删除临时节点。 9)节点重新排号 在tool-renumber面板中重新排序
avlcruise整车动力性经济性仿真分析一点技巧
A V L C R U I S E整车动力性经济性仿真分析一点技巧(总2页) -CAL-FENGHAI.-(YICAI)-Company One1 -CAL-本页仅作为文档封面,使用请直接删除
AVL CRUISE整车动力性经济性仿真分析 章郁斌 长安汽车工程研究院规划所,重庆,401120,zhangyubinde 摘要:本文主要介绍了 关键字:CRUISE 动力经济仿真 CRUISE软件可以用于车辆的动力性,燃油经济性以及排放性能的仿真,其模块化的建模理念使得用户可以便捷的搭建不同布置结构的车辆模型,其复杂完善的求解器可以确保计算的速度CRUISE的一个典型应用是对车辆传动系统和发动机的开发,它可以计算并优化车辆的燃油经济性,排放性,动力性(原地起步加速能力、超车加速能力)、变速箱速比、制动性能等,也可以为应力计算和传动系的振动生成载荷谱 一、简化计算任务 通常计算任务会有这样一种情况,选择多种变速器与多种发动机或者主减速器进行搭配计算。这在CRUISE中其实很好实现的,如下图操作即可 然后在计算中心里添加对应的模型即可,如图 当你有多个组件进行搭配的时候,可以在DOE plan中进行搭配的选择。 如此一来,可以使计算任务变得非常简单了。 二、简化结果提取 在模型里添加一个special model中的ms-export的模块,按下图配置输出的参数
在总线里配置好ms-export模块的参数总线连接 然后对计算任务的输出进行修改,勾上output of ms-exports 然后开始计算,如果你的任务是有很多case(各种组件的组合计算)这样计算的结果会生成相应很多个excel工作簿,然后我们可以编相应的程序或者宏就可以对这些工作簿进行处理,可以把结果生成到一个另外一个工作簿中,如此工作就变得很轻松了,我们可以把更多的精力放在真正的研究上了。 目前我可以用这种方法很方便的提取以下结果: 爬坡度的结果如何提取,我还没有找到办法,如果你找到了的话,请告诉我一下,谢谢
汽车性能仿真计算实验实验报告
实验一汽车动力性仿真计算 实验目的 1.掌握汽车动力性评价指标和评价方法 2.学会使用matlab 对汽车动力性指标进行计算 实验内容 1.学习汽车动力性理论 2.编写计算程序 3.绘制汽车动力性图形 实验设备 硬件环境:汽车虚拟仿真实验室 软件环境:matlab2016a 及以上版本 实验步骤 1.学习汽车动力性理论 2.编写计算程序 3.绘制汽车动力性图形 实验报告 1. 运用matlab 解决《汽车理论》第一章习题1.3 1)绘制汽车驱动力与行驶阻力平衡图 汽车驱动力Ft= r i i T t o g tq η 行驶阻力F f +F w +F i +F j =G ?f + 2D 21.12 A C a u +G ?i+dt du m δ 发动机转速与汽车行驶速度之间的关系式为:0 g i n r 0.377 ua i ?= 由本题的已知条件,即可求得汽车驱动力和行驶阻力与车速的关系,编程即可得到汽车驱动力与行驶阻力平衡图。 2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率 ①由1)得驱动力与行驶阻力平衡图,汽车的最高车速出现在5档时汽车的驱动力曲线与行驶阻力曲线的交点处,Ua max =99.08m/s 2。 ②汽车的爬坡能力,指汽车在良好路面上克服w f F F +后的余力全部用来(等速)克服坡度阻力时能爬上的坡度, 此时 0=dt du ,因此有() w f t i F F F F +-=,可得到汽车爬坡度与车速的关系式:( )??? ? ? ?+-=G F F F i w f t arcsin tan ; 而汽
车最大爬坡度为Ⅰ档时的最大爬坡度。利用MATLAB 计算可得,352.0max =i 。 ③如是前轮驱动,1?C = q b hg q L L -;相应的附着率1?C 为1.20,不合理,舍去。 如是后轮驱动,2?C =q a hg q L L +;相应的附着率2?C 为0.50。 3)绘制汽车行驶加速度倒数曲线,求加速时间 利用MATLAB 画出汽车的行驶加速度图和汽车的加速度倒数曲线图: 忽略原地起步时的离合器打滑过程,假设在初时刻时,汽车已具有Ⅱ档的最低车速。由于各档加速度曲线不相交(如图三所示),即各低档位加速行驶至发动机转速达到最到转速时换入高档位;并且忽略换档过程所经历的时间。结果用MATLAB 画出汽车加速时间曲线如图五所示。如图所示,汽车用Ⅱ档起步加速行驶至70km/h 的加速时间约为26.0s 。 max i
LwIP协议栈源码详解
LwIP协议栈源码详解 ——TCP/IP协议的实现 Created by.. 老衲五木 at.. UESTC Contact me.. for_rest@https://www.sodocs.net/doc/828148300.html, 540535649@https://www.sodocs.net/doc/828148300.html,
前言 最近一个项目用到LwIP,恰好看到网上讨论的人比较多,所以有了写这篇学习笔记的冲动,一是为了打发点发呆的时间,二是为了吹过的那些NB。往往决定做一件事是简单的,而坚持做完这件事却是漫长曲折的,但终究还是写完了,时间开销大概为四个月,内存开销无法估计。。 这篇文章覆盖了LwIP协议大部分的内容,但是并不全面。它主要讲解了LwIP协议最重要也是最常被用到的部分,包括内存管理,底层网络接口管理,ARP层,IP层,TCP层,API 层等,这些部分是LwIP的典型应用中经常涉及到的。而LwIP协议的其他部分,包括UDP,DHCP,DNS,IGMP,SNMP,PPP等不具有使用共性的部分,这篇文档暂时未涉及。 原来文章是发在空间中的,每节每节依次更新,后来又改发为博客,再后来就干脆懒得发了。现在终于搞定,于是将所有文章汇总。绞尽脑汁的想写一段空前绝后,人见人爱的序言,但越写越觉得像是猫儿抓的一样。就这样,PS:由于本人文笔有限,情商又低,下里巴人一枚,所以文中的很多语句可能让您很纠结,您可以通过邮箱与我联系。共同探讨才是进步的关键。 最后,欢迎读者以任何方式使用与转载,但请保留作者相关信息,酱紫!码字。。。世界上最痛苦的事情莫过于此。。。 ——老衲五木
目录 1 移植综述------------------------------------------------------------------------------------------------------4 2 动态内存管理------------------------------------------------------------------------------------------------6 3 数据包pbuf--------------------------------------------------------------------------------------------------9 4 pbuf释放---------------------------------------------------------------------------------------------------13 5 网络接口结构-----------------------------------------------------------------------------------------------16 6 以太网数据接收--------------------------------------------------------------------------------------------20 7 ARP表-----------------------------------------------------------------------------------------------------23 8 ARP表查询-----------------------------------------------------------------------------------------------26 9 ARP层流程-----------------------------------------------------------------------------------------------28 10 IP层输入-------------------------------------------------------------------------------------------------31 11 IP分片重装1--------------------------------------------------------------------------------------------34 12 IP分片重装2--------------------------------------------------------------------------------------------37 13 ICMP处理-----------------------------------------------------------------------------------------------40 14 TCP建立与断开----------------------------------------------------------------------------------------43 15 TCP状态转换-------------------------------------------------------------------------------------------46 16 TCP控制块----------------------------------------------------------------------------------------------49 17 TCP建立流程-------------------------------------------------------------------------------------------53 18 TCP状态机----------------------------------------------------------------------------------------------56 19 TCP输入输出函数1-----------------------------------------------------------------------------------60 20 TCP输入输出函数2-----------------------------------------------------------------------------------63 21 TCP滑动窗口-------------------------------------------------------------------------------------------66 22 TCP超时与重传----------------------------------------------------------------------------------------69 23 TCP慢启动与拥塞避免-------------------------------------------------------------------------------73 24 TCP快速恢复重传和Nagle算法-------------------------------------------------------------------76 25 TCP坚持与保活定时器-------------------------------------------------------------------------------80 26 TCP定时器----------------------------------------------------------------------------------------------84 27 TCP终结与小结----------------------------------------------------------------------------------------88 28 API实现及相关数据结构-----------------------------------------------------------------------------91 29 API消息机制--------------------------------------------------------------------------------------------94 30 API函数及编程实例-----------------------------------------------------------------------------------97
lwip协议栈源码分析
LWIP源码分析 ----- caoxw 1 LWIP的结构 LWIP(Light weight internet protocol)的主要模块包括:配置模块、初始化模块、NetIf 模块、mem(memp)模块、netarp模块、ip模块、udp模块、icmp 模块、igmp模块、dhcp 模块、tcp模块、snmp模块等。下面主要对我们需要关心的协议处理进行说明和梳理。 配置模块: 配置模块通过各种宏定义的方式对系统、子模块进行了配置。比如,通过宏,配置了mem管理模块的参数。该配置模块还通过宏,配置了协议栈所支持的协议簇,通过宏定制的方式,决定了支持那些协议。主要的文件是opt.h。 初始化模块: 初始化模块入口的文件为tcpip.c,其初始化入口函数为: void tcpip_init(void (* initfunc)(void *), void *arg) 该入口通过调用lwip_init()函数,初始化了所有的子模块,并启动了协议栈管理进程。同时,该函数还带有回调钩子及其参数。可以在需要的地方进行调用。 协议栈数据分发管理进程负责了输入报文的处理、超时处理、API函数以及回调的处理,原型如下: static void tcpip_thread(void *arg) NetIf模块: Netif模块为协议栈与底层驱动的接口模块,其将底层的一个网口设备描述成协议栈的一个接口设备(net interface)。该模块的主要文件为netif.c。其通过链表的方式描述了系统中的所有网口设备。 Netif的数据结构描述了网口的参数,包括IP地址、MAC地址、link状态、网口号、收发函数等等参数。一个网口设备的数据收发主要通过该结构进行。 Mem(memp)模块: Mem模块同一管理了协议栈使用的内容缓冲区,并管理pbuf结构以及报文的字段处理。主要的文件包括mem.c、memp.c、pbuf.c。 netarp模块: netarp模块是处理arp协议的模块,主要源文件为etharp.c。其主要入口函数为: err_t ethernet_input(struct pbuf *p, struct netif *netif) 该入口函数通过判断输入报文p的协议类型来决定是按照arp协议进行处理还是将该报文提交到IP协议。如果报文是arp报文,该接口则调用etharp_arp_input,进行arp请求处理。 如果是ip报文,该接口就调用etharp_ip_input进行arp更新,并调用ip_input接口,将报文提交给ip层。 在该模块中,创建了设备的地址映射arp表,并提供地址映射关系查询接口。同时还提供了arp报文的发送接口。如下:
汽车用液力变矩器设计及性能仿真(机械CAD图纸)
摘要 本文的研究是以汽车用液力变矩器为研究对象,基于三维流场理论,借助于UG、GAMBIT、FLUENT等软件,对液力变矩器的内流场进行了仿真计算。本课题研究的目的和意义就在于,通过CFD软件的模拟仿真,对液力变矩器的流道的压力和速度进行有效分析计算。本文主要有以下内容: (1)首先介绍了课题研究的背景,液力变矩器在国内外的应用情况和流场理论的发展现状,指出了液力变矩器设计计算的发展方向是三维流场理论;然后对液力变矩器的组成以及工作原理进行了阐述,并指出了主要研究内容。 (2)阐述了计算流体力学的基本理论。首先列出了控制方程包括连续性方程和动量守恒方程,由于本课题研究的是不可压缩流体,热交换量可以忽略不计,敌不考虑能量守恒方程,然后介绍了将控制方程离散化的方法;接着详细介绍了有限体积法的基本原理,常用的离散格式:分析了网格的生成技术,分别对结构网格、非结构网格以及混合网格作了阐述;最后介绍了常用的湍流模型,湍流流动的近壁处理方法和流场数值计算的算法。介绍了反求发测绘液力变矩器。 (3)介绍了常用的一些CFD软件,并选择FLUENT对本课题进行研究;为了能够顺利地得到收敛解,提出了研究液力变矩器流场的一些假设,并对流场进行了一定的简化;然后通过CAD 软件UG建立叶轮流道的几何模型,并使用GAMBIT生成计算网格,为了提高计算精度,使用六面体网格;选择分离求解器隐式格式进行求解,使用绝对速度方程,湍流模型选择标准k一£模型,同时使用标准壁面函数;离散格式采用二阶迎风格式(这样可以提高解算精度),压力一速度耦合选用SIMPLE算法,入口边界条件使用压力入口,出口边界条件使用压力出口,其余壁面使用非滑移壁面边界条件;在叶轮之间的交互面上使用混合平面模型。 (4)对计算结果进行了分析,并与实验结果进行了比较,二者基本吻合证明了三维流场分析的